Common Corruptions for Enhancing and Evaluating Robustness in Air-to-Air Visual Object Detection

0
Sign in to get full access
Overview
- This paper explores the use of common corruptions to enhance and evaluate the robustness of air-to-air visual object detection models.
- The researchers investigate the effectiveness of various corruption techniques in improving the performance and reliability of these models in real-world aerial scenarios.
- The paper presents a comprehensive evaluation of the impact of different corruptions on the robustness of object detection algorithms, providing insights for developing more resilient systems.
Plain English Explanation
When autonomous vehicles or drones need to detect and avoid other objects in the air, they rely on computer vision models to process the images from their cameras. However, these models can be susceptible to errors or degraded performance when faced with real-world challenges like atmospheric distortions, camera shake, or poor lighting conditions.
This research explores ways to make these computer vision models more robust and reliable, even in the face of such challenges. The researchers tested various "corruptions" - artificial distortions or alterations to the input images - to see how they affected the performance of object detection algorithms. By understanding how different corruptions impact the models, the researchers can develop techniques to improve the models' ability to maintain accurate detection and classification of objects, even in demanding aerial environments.
The findings from this work could help create more reliable and safe autonomous systems for applications like drone navigation, collision avoidance, and aerial surveillance, where the ability to correctly perceive and respond to the surrounding environment is critical.
Technical Explanation
The paper presents a comprehensive study on the use of common corruptions to enhance and evaluate the robustness of air-to-air visual object detection models. The researchers investigate the effectiveness of various corruption techniques, such as link to "how-to-augment-atmospheric-turbulence-effects-thermal", link to "ensuring-uav-safety-vision-only-real-time", and link to "effective-robust-adversarial-training-against-data-label", in improving the performance and reliability of these models in real-world aerial scenarios.
The paper presents a comprehensive evaluation of the impact of different corruptions on the robustness of object detection algorithms, providing insights for developing more resilient systems. The researchers leverage the link to "multicorrupt-multi-modal-robustness-dataset-benchmark-lidar" dataset to systematically assess the effects of various corruptions on the detection accuracy and reliability of several state-of-the-art object detection models.
The findings from this work could help create more reliable and safe autonomous systems for applications like drone navigation, collision avoidance, and aerial surveillance, where the ability to correctly perceive and respond to the surrounding environment is critical.
Critical Analysis
The paper provides a thorough investigation into the use of common corruptions to enhance and evaluate the robustness of air-to-air visual object detection models. The researchers have carefully designed their experiments and leveraged relevant datasets to systematically assess the impact of various corruptions on the performance of these models.
One potential limitation of the study is the reliance on simulated corruptions, which may not fully capture the complexity and variability of real-world aerial environments. While the researchers have made efforts to make the corruptions realistic, there may be additional factors that affect the performance of object detection algorithms in actual flight conditions. Further research could explore the use of physical experimentation or real-world data collection to complement the simulation-based approach.
Additionally, the paper focuses primarily on the impact of corruptions on detection accuracy and reliability. While these are crucial metrics, the researchers could also consider evaluating the models' robustness in terms of other aspects, such as inference latency, computational efficiency, or the ability to generalize to new, unseen scenarios.
Overall, this work makes a valuable contribution to the field of air-to-air visual object detection, providing insights that can guide the development of more robust and reliable autonomous systems. The link to "corruptions-supervised-learning-problems-typology-mitigations" article may also offer additional perspectives on the broader challenges and mitigation strategies for addressing corruptions in supervised learning problems.
Conclusion
This paper presents a comprehensive investigation into the use of common corruptions to enhance and evaluate the robustness of air-to-air visual object detection models. The researchers have demonstrated the effectiveness of various corruption techniques in improving the performance and reliability of these models in real-world aerial scenarios.
The findings from this work have important implications for the development of more reliable and safe autonomous systems, particularly in applications like drone navigation, collision avoidance, and aerial surveillance. By understanding the impact of different corruptions on object detection algorithms, the research community can work towards creating computer vision models that are better equipped to handle the challenges of the aerial environment, ultimately contributing to the advancement of autonomous aerial technologies.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Common Corruptions for Enhancing and Evaluating Robustness in Air-to-Air Visual Object Detection
Anastasios Arsenos, Vasileios Karampinis, Evangelos Petrongonas, Christos Skliros, Dimitrios Kollias, Stefanos Kollias, Athanasios Voulodimos
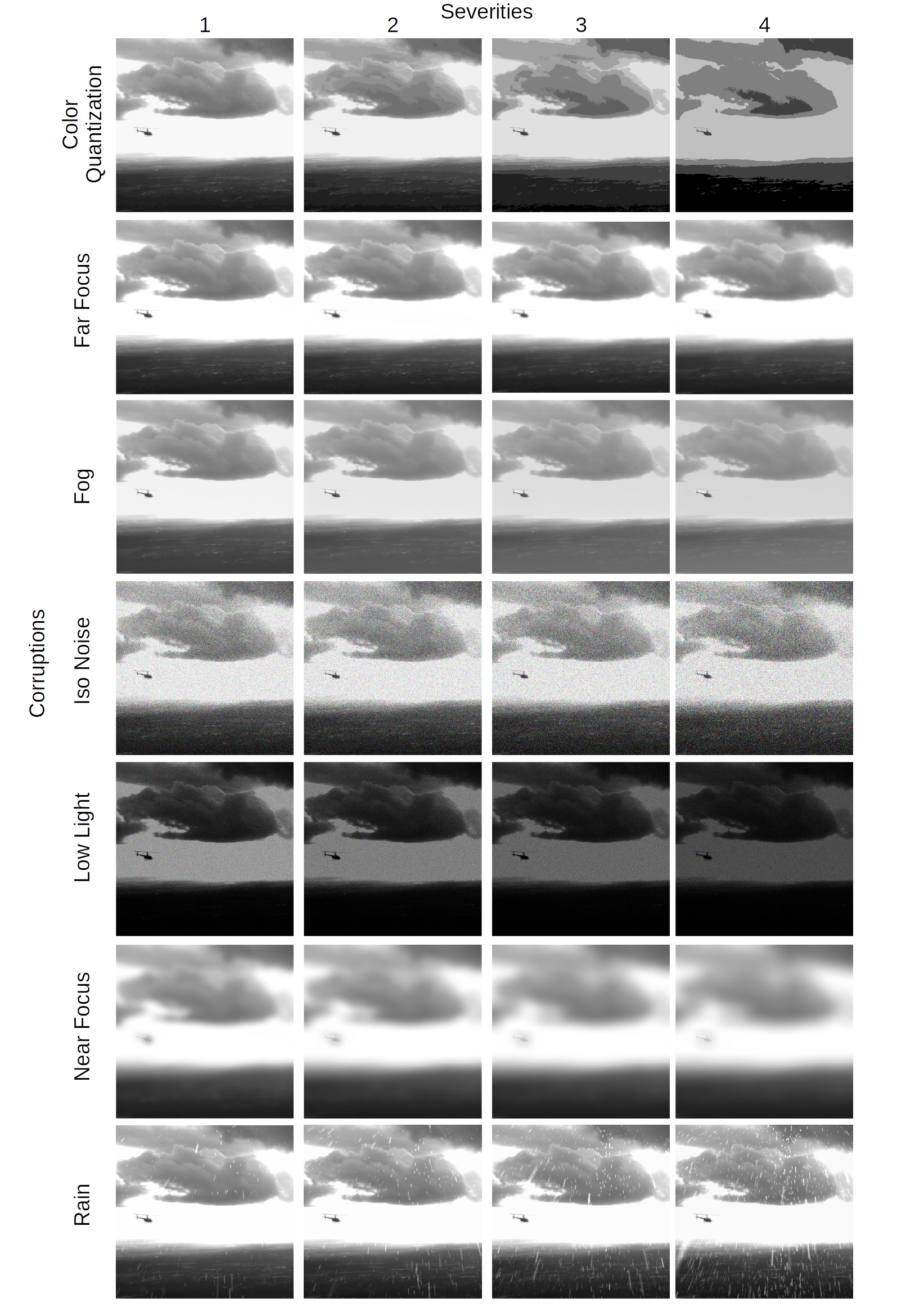
The main barrier to achieving fully autonomous flights lies in autonomous aircraft navigation. Managing non-cooperative traffic presents the most important challenge in this problem. The most efficient strategy for handling non-cooperative traffic is based on monocular video processing through deep learning models. This study contributes to the vision-based deep learning aircraft detection and tracking literature by investigating the impact of data corruption arising from environmental and hardware conditions on the effectiveness of these methods. More specifically, we designed $7$ types of common corruptions for camera inputs taking into account real-world flight conditions. By applying these corruptions to the Airborne Object Tracking (AOT) dataset we constructed the first robustness benchmark dataset named AOT-C for air-to-air aerial object detection. The corruptions included in this dataset cover a wide range of challenging conditions such as adverse weather and sensor noise. The second main contribution of this letter is to present an extensive experimental evaluation involving $8$ diverse object detectors to explore the degradation in the performance under escalating levels of corruptions (domain shifts). Based on the evaluation results, the key observations that emerge are the following: 1) One-stage detectors of the YOLO family demonstrate better robustness, 2) Transformer-based and multi-stage detectors like Faster R-CNN are extremely vulnerable to corruptions, 3) Robustness against corruptions is related to the generalization ability of models. The third main contribution is to present that finetuning on our augmented synthetic data results in improvements in the generalisation ability of the object detector in real-world flight experiments.
Read more5/17/2024
👀
0
New!A Survey on the Robustness of Computer Vision Models against Common Corruptions
Shunxin Wang, Raymond Veldhuis, Christoph Brune, Nicola Strisciuglio
The performance of computer vision models are susceptible to unexpected changes in input images caused by sensor errors or extreme imaging environments, known as common corruptions (e.g. noise, blur, illumination changes). These corruptions can significantly hinder the reliability of these models when deployed in real-world scenarios, yet they are often overlooked when testing model generalization and robustness. In this survey, we present a comprehensive overview of methods that improve the robustness of computer vision models against common corruptions. We categorize methods into three groups based on the model components and training methods they target: data augmentation, learning strategies, and network components. We release a unified benchmark framework (available at url{https://github.com/nis-research/CorruptionBenchCV}) to compare robustness performance across several datasets, and we address the inconsistencies of evaluation practices in the literature. Our experimental analysis highlights the base corruption robustness of popular vision backbones, revealing that corruption robustness does not necessarily scale with model size and data size. Large models gain negligible robustness improvements, considering the increased computational requirements. To achieve generalizable and robust computer vision models, we foresee the need of developing new learning strategies that efficiently exploit limited data and mitigate unreliable learning behaviors.
Read more9/17/2024
🔎
0
MultiCorrupt: A Multi-Modal Robustness Dataset and Benchmark of LiDAR-Camera Fusion for 3D Object Detection
Till Beemelmanns, Quan Zhang, Christian Geller, Lutz Eckstein
Multi-modal 3D object detection models for automated driving have demonstrated exceptional performance on computer vision benchmarks like nuScenes. However, their reliance on densely sampled LiDAR point clouds and meticulously calibrated sensor arrays poses challenges for real-world applications. Issues such as sensor misalignment, miscalibration, and disparate sampling frequencies lead to spatial and temporal misalignment in data from LiDAR and cameras. Additionally, the integrity of LiDAR and camera data is often compromised by adverse environmental conditions such as inclement weather, leading to occlusions and noise interference. To address this challenge, we introduce MultiCorrupt, a comprehensive benchmark designed to evaluate the robustness of multi-modal 3D object detectors against ten distinct types of corruptions. We evaluate five state-of-the-art multi-modal detectors on MultiCorrupt and analyze their performance in terms of their resistance ability. Our results show that existing methods exhibit varying degrees of robustness depending on the type of corruption and their fusion strategy. We provide insights into which multi-modal design choices make such models robust against certain perturbations. The dataset generation code and benchmark are open-sourced at https://github.com/ika-rwth-aachen/MultiCorrupt.
Read more4/23/2024

0
Indoor scene recognition from images under visual corruptions
Willams de Lima Costa, Raul Ismayilov, Nicola Strisciuglio, Estefania Talavera Martinez
The classification of indoor scenes is a critical component in various applications, such as intelligent robotics for assistive living. While deep learning has significantly advanced this field, models often suffer from reduced performance due to image corruption. This paper presents an innovative approach to indoor scene recognition that leverages multimodal data fusion, integrating caption-based semantic features with visual data to enhance both accuracy and robustness against corruption. We examine two multimodal networks that synergize visual features from CNN models with semantic captions via a Graph Convolutional Network (GCN). Our study shows that this fusion markedly improves model performance, with notable gains in Top-1 accuracy when evaluated against a corrupted subset of the Places365 dataset. Moreover, while standalone visual models displayed high accuracy on uncorrupted images, their performance deteriorated significantly with increased corruption severity. Conversely, the multimodal models demonstrated improved accuracy in clean conditions and substantial robustness to a range of image corruptions. These results highlight the efficacy of incorporating high-level contextual information through captions, suggesting a promising direction for enhancing the resilience of classification systems.
Read more8/26/2024