A Comprehensive Survey and Taxonomy on Point Cloud Registration Based on Deep Learning

0

Sign in to get full access
Overview
- This paper provides a comprehensive survey and taxonomy of deep learning-based methods for point cloud registration.
- Point cloud registration is the process of aligning two or more 3D point clouds, which is a crucial task in various applications such as robotics, augmented reality, and 3D reconstruction.
- The paper reviews the state-of-the-art deep learning techniques for point cloud registration and organizes them into a taxonomy based on various criteria, such as the input data representation, network architecture, and application domain.
Plain English Explanation
Point clouds are 3D data structures that represent the surface of an object or environment using a collection of individual points. Registering or aligning two point clouds is an important task in many fields, as it allows researchers and engineers to combine data from different sources to get a more complete picture.
This paper looks at how deep learning, a powerful AI technique, can be used to automate the point cloud registration process. The researchers reviewed a wide range of deep learning-based methods and organized them into a taxonomy, or classification system, based on factors like the input data format, the network architecture, and the intended applications.
By providing this comprehensive overview, the paper helps researchers and practitioners in the field understand the current state of the art in deep learning for point cloud registration. It also highlights areas where further advancements are needed, guiding future research and development efforts in this important domain.
Technical Explanation
The paper presents a thorough review of deep learning techniques for point cloud registration, which is the process of aligning two or more 3D point clouds to a common coordinate system. The authors organize these methods into a taxonomy based on several key criteria:
-
Input data representation: Some approaches use the raw point cloud data, while others convert the points into alternative representations, such as 2D images or graphs.
-
Network architecture: The deep learning models employed range from simple multilayer perceptrons to more complex architectures like PointNet, PointNet++, and PointTransformer.
-
Application domain: The reviewed methods target a variety of use cases, such as robotics, augmented reality, and 3D reconstruction.
The paper also discusses the key components of a typical deep learning-based point cloud registration pipeline, including preprocessing, feature extraction, transformation estimation, and evaluation. Additionally, it highlights recent advancements in point cloud data augmentation and efficient and robust registration algorithms.
Critical Analysis
The paper provides a thorough and well-structured survey of the deep learning landscape for point cloud registration. However, the authors acknowledge several limitations and areas for further research:
-
Lack of standardized benchmarks: The field lacks comprehensive benchmark datasets and evaluation protocols, making it challenging to compare the performance of different methods.
-
Sensitivity to noise and occlusions: Many deep learning-based approaches struggle with point clouds that are noisy or contain missing data, limiting their real-world applicability.
-
Interpretability and explainability: The inner workings of the deep learning models are often opaque, making it difficult to understand the underlying mechanisms and failure modes.
-
Generalization capabilities: Most methods are tailored to specific application domains and may not generalize well to other tasks or environments.
The paper encourages researchers to address these challenges through the development of more robust, efficient, and interpretable deep learning architectures for point cloud registration. Additionally, the authors suggest the need for standardized benchmarks and more comprehensive evaluation protocols to drive the field forward.
Conclusion
This comprehensive survey and taxonomy on deep learning-based point cloud registration provides a valuable resource for researchers and practitioners in the field. By organizing the state-of-the-art methods into a clear framework, the paper helps to identify the key trends, challenges, and opportunities in this rapidly evolving domain.
The insights gained from this work can inform the design of future deep learning models and guide the development of more reliable and efficient point cloud registration algorithms. As the applications of 3D sensing and reconstruction continue to expand, the advancements in this area will have far-reaching implications for a wide range of industries and technologies.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A Comprehensive Survey and Taxonomy on Point Cloud Registration Based on Deep Learning
Yu-Xin Zhang, Jie Gui, Xiaofeng Cong, Xin Gong, Wenbing Tao
Point cloud registration (PCR) involves determining a rigid transformation that aligns one point cloud to another. Despite the plethora of outstanding deep learning (DL)-based registration methods proposed, comprehensive and systematic studies on DL-based PCR techniques are still lacking. In this paper, we present a comprehensive survey and taxonomy of recently proposed PCR methods. Firstly, we conduct a taxonomy of commonly utilized datasets and evaluation metrics. Secondly, we classify the existing research into two main categories: supervised and unsupervised registration, providing insights into the core concepts of various influential PCR models. Finally, we highlight open challenges and potential directions for future research. A curated collection of valuable resources is made available at https://github.com/yxzhang15/PCR.
Read more7/8/2024

0
DIPR: Efficient Point Cloud Registration via Dynamic Iteration
Yang Ai, Qiang Bai, Jindong Li, Xi Yang
Point cloud registration (PCR) is an essential task in 3D vision. Existing methods achieve increasingly higher accuracy. However, a large proportion of non-overlapping points in point cloud registration consume a lot of computational resources while negatively affecting registration accuracy. To overcome this challenge, we introduce a novel Efficient Point Cloud Registration via Dynamic Iteration framework, DIPR, that makes the neural network interactively focus on overlapping points based on sparser input points. We design global and local registration stages to achieve efficient course-tofine processing. Beyond basic matching modules, we propose the Refined Nodes to narrow down the scope of overlapping points by using adopted density-based clustering to significantly reduce the computation amount. And our SC Classifier serves as an early-exit mechanism to terminate the registration process in time according to matching accuracy. Extensive experiments on multiple datasets show that our proposed approach achieves superior registration accuracy while significantly reducing computational time and GPU memory consumption compared to state-of-the-art methods.
Read more8/27/2024
🤿
0
Deep Learning-based Point Cloud Registration for Augmented Reality-guided Surgery
Maximilian Weber, Daniel Wild, Jens Kleesiek, Jan Egger, Christina Gsaxner
Point cloud registration aligns 3D point clouds using spatial transformations. It is an important task in computer vision, with applications in areas such as augmented reality (AR) and medical imaging. This work explores the intersection of two research trends: the integration of AR into image-guided surgery and the use of deep learning for point cloud registration. The main objective is to evaluate the feasibility of applying deep learning-based point cloud registration methods for image-to-patient registration in augmented reality-guided surgery. We created a dataset of point clouds from medical imaging and corresponding point clouds captured with a popular AR device, the HoloLens 2. We evaluate three well-established deep learning models in registering these data pairs. While we find that some deep learning methods show promise, we show that a conventional registration pipeline still outperforms them on our challenging dataset.
Read more5/7/2024
0
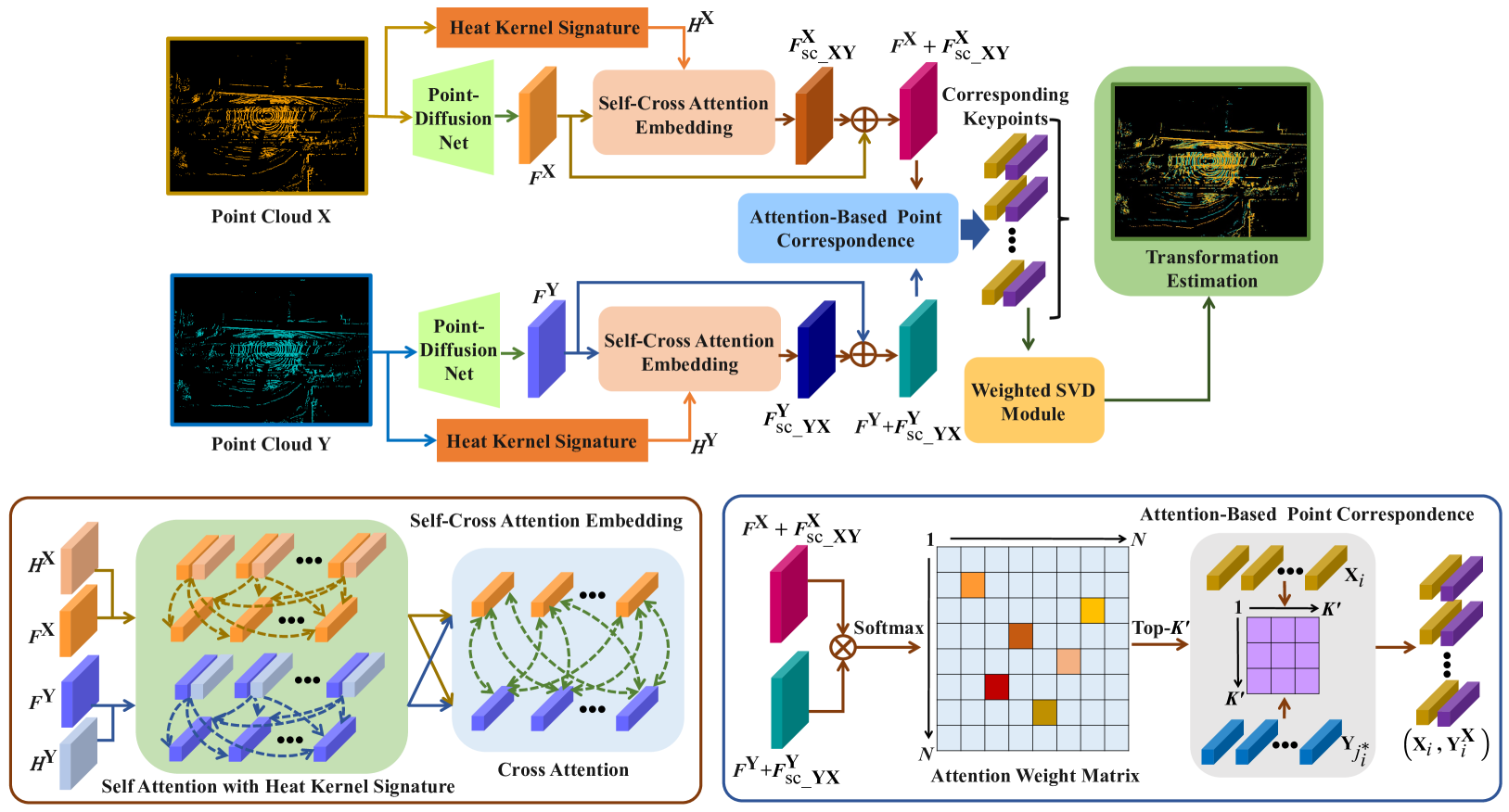
PointDifformer: Robust Point Cloud Registration With Neural Diffusion and Transformer
Rui She, Qiyu Kang, Sijie Wang, Wee Peng Tay, Kai Zhao, Yang Song, Tianyu Geng, Yi Xu, Diego Navarro Navarro, Andreas Hartmannsgruber
Point cloud registration is a fundamental technique in 3-D computer vision with applications in graphics, autonomous driving, and robotics. However, registration tasks under challenging conditions, under which noise or perturbations are prevalent, can be difficult. We propose a robust point cloud registration approach that leverages graph neural partial differential equations (PDEs) and heat kernel signatures. Our method first uses graph neural PDE modules to extract high dimensional features from point clouds by aggregating information from the 3-D point neighborhood, thereby enhancing the robustness of the feature representations. Then, we incorporate heat kernel signatures into an attention mechanism to efficiently obtain corresponding keypoints. Finally, a singular value decomposition (SVD) module with learnable weights is used to predict the transformation between two point clouds. Empirical experiments on a 3-D point cloud dataset demonstrate that our approach not only achieves state-of-the-art performance for point cloud registration but also exhibits better robustness to additive noise or 3-D shape perturbations.
Read more4/23/2024