FreeReg: Image-to-Point Cloud Registration Leveraging Pretrained Diffusion Models and Monocular Depth Estimators
2310.03420
0
0
Abstract
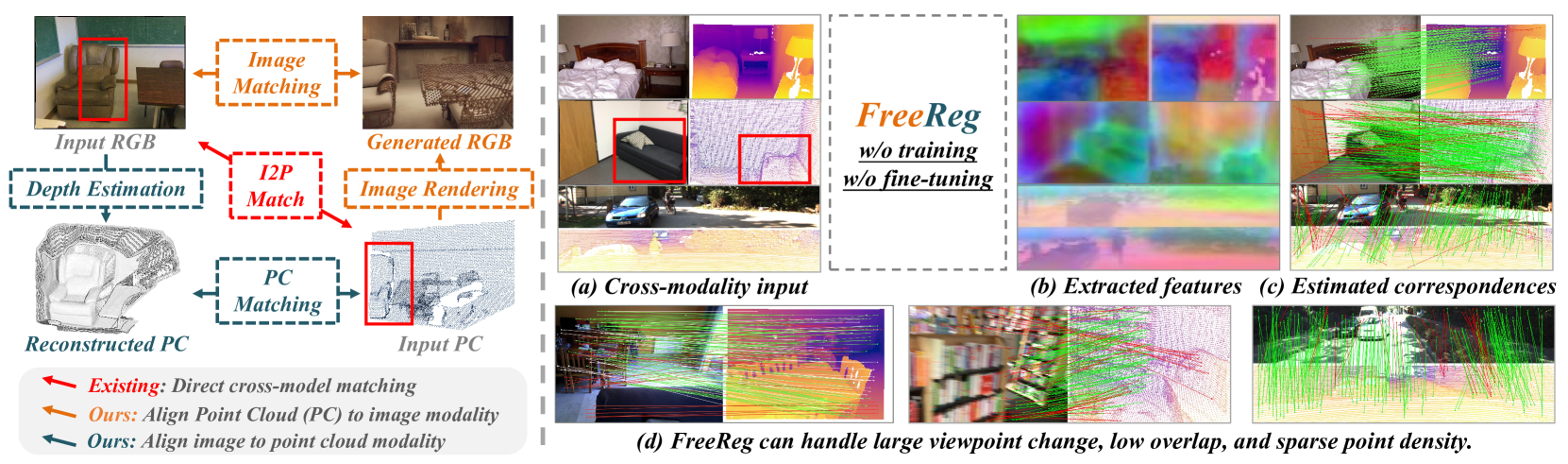
Matching cross-modality features between images and point clouds is a fundamental problem for image-to-point cloud registration. However, due to the modality difference between images and points, it is difficult to learn robust and discriminative cross-modality features by existing metric learning methods for feature matching. Instead of applying metric learning on cross-modality data, we propose to unify the modality between images and point clouds by pretrained large-scale models first, and then establish robust correspondence within the same modality. We show that the intermediate features, called diffusion features, extracted by depth-to-image diffusion models are semantically consistent between images and point clouds, which enables the building of coarse but robust cross-modality correspondences. We further extract geometric features on depth maps produced by the monocular depth estimator. By matching such geometric features, we significantly improve the accuracy of the coarse correspondences produced by diffusion features. Extensive experiments demonstrate that without any task-specific training, direct utilization of both features produces accurate image-to-point cloud registration. On three public indoor and outdoor benchmarks, the proposed method averagely achieves a 20.6 percent improvement in Inlier Ratio, a three-fold higher Inlier Number, and a 48.6 percent improvement in Registration Recall than existing state-of-the-arts.
Create account to get full access
Overview
- The paper proposes a novel method called FreeReg for registering 2D images to 3D point clouds.
- FreeReg leverages pre-trained diffusion models and monocular depth estimators to enable free-form image-to-point cloud registration.
- The method aims to address the limitations of existing techniques, which often require manual intervention or expensive 3D sensors.
Plain English Explanation
FreeReg is a new way to register, or align, 2D images to 3D point clouds. Point clouds are 3D data representations that can be captured using specialized 3D sensors like LiDAR. However, these sensors can be expensive and not always available.
FreeReg solves this problem by using pre-trained machine learning models to estimate depth information from regular 2D images. This depth information is then used to register the 2D image to the 3D point cloud, without needing any expensive 3D sensors. The key idea is to leverage diffusion models and monocular depth estimators - machine learning models that can infer 3D information from 2D images.
By combining these techniques, FreeReg can register 2D images to 3D point clouds in a "free-form" way, without requiring manual intervention or special hardware. This could be useful for applications like augmented reality, where 2D images need to be seamlessly integrated with 3D environments, or automatic 3D reconstruction from multiple 2D images.
Technical Explanation
FreeReg consists of two main components: a diffusion-based depth estimation module and a registration module. The depth estimation module uses a pre-trained diffusion model to predict a depth map from the input 2D image. This depth map is then used by the registration module to align the 2D image to the 3D point cloud.
The registration module employs a variant of the Iterative Closest Point (ICP) algorithm, which is a common technique for aligning 3D shapes. However, FreeReg's registration module is designed to work with the depth information produced by the diffusion-based depth estimator, rather than relying on direct 3D sensor data.
The key innovation in FreeReg is its ability to leverage pre-trained diffusion models and monocular depth estimators, which enables free-form image-to-point cloud registration without the need for specialized 3D hardware. The authors demonstrate that FreeReg outperforms existing methods in terms of registration accuracy and robustness, while being more widely applicable.
Critical Analysis
The paper provides a comprehensive evaluation of FreeReg, comparing it to several baselines on both synthetic and real-world datasets. The results show that FreeReg achieves state-of-the-art performance, suggesting that the combination of diffusion-based depth estimation and ICP-based registration is a promising approach.
However, the authors acknowledge that FreeReg's performance is still susceptible to challenges such as occlusions, large viewpoint changes, and inaccuracies in the depth estimation. Additionally, the reliance on pre-trained models may limit the method's flexibility in handling diverse input data or specific application requirements.
Further research could explore ways to improve the robustness of the depth estimation and registration modules, potentially by incorporating additional contextual information or developing more adaptive techniques. Additionally, investigating the generalization of FreeReg to different domains or applications could help expand its practical utility.
Conclusion
The FreeReg method presented in this paper offers a novel and practical solution for registering 2D images to 3D point clouds without the need for specialized 3D sensors. By leveraging pre-trained diffusion models and monocular depth estimators, FreeReg enables free-form image-to-point cloud registration, which could have significant implications for a wide range of applications, such as augmented reality, 3D reconstruction, and robotic perception.
The paper's strong technical contributions and comprehensive evaluation suggest that FreeReg represents an important step forward in the field of multi-modal data registration. As the authors note, there are still opportunities for further refinement and expansion of the method, but the core ideas behind FreeReg have the potential to unlock new possibilities for seamlessly integrating 2D and 3D data in various real-world scenarios.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Diff-Reg v1: Diffusion Matching Model for Registration Problem
Qianliang Wu, Haobo Jiang, Lei Luo, Jun Li, Yaqing Ding, Jin Xie, Jian Yang
0
0
Establishing reliable correspondences is essential for registration tasks such as 3D and 2D3D registration. Existing methods commonly leverage geometric or semantic point features to generate potential correspondences. However, these features may face challenges such as large deformation, scale inconsistency, and ambiguous matching problems (e.g., symmetry). Additionally, many previous methods, which rely on single-pass prediction, may struggle with local minima in complex scenarios. To mitigate these challenges, we introduce a diffusion matching model for robust correspondence construction. Our approach treats correspondence estimation as a denoising diffusion process within the doubly stochastic matrix space, which gradually denoises (refines) a doubly stochastic matching matrix to the ground-truth one for high-quality correspondence estimation. It involves a forward diffusion process that gradually introduces Gaussian noise into the ground truth matching matrix and a reverse denoising process that iteratively refines the noisy matching matrix. In particular, the feature extraction from the backbone occurs only once during the inference phase. Our lightweight denoising module utilizes the same feature at each reverse sampling step. Evaluation of our method on both 3D and 2D3D registration tasks confirms its effectiveness.
4/1/2024
PointDifformer: Robust Point Cloud Registration With Neural Diffusion and Transformer
Rui She, Qiyu Kang, Sijie Wang, Wee Peng Tay, Kai Zhao, Yang Song, Tianyu Geng, Yi Xu, Diego Navarro Navarro, Andreas Hartmannsgruber
0
0
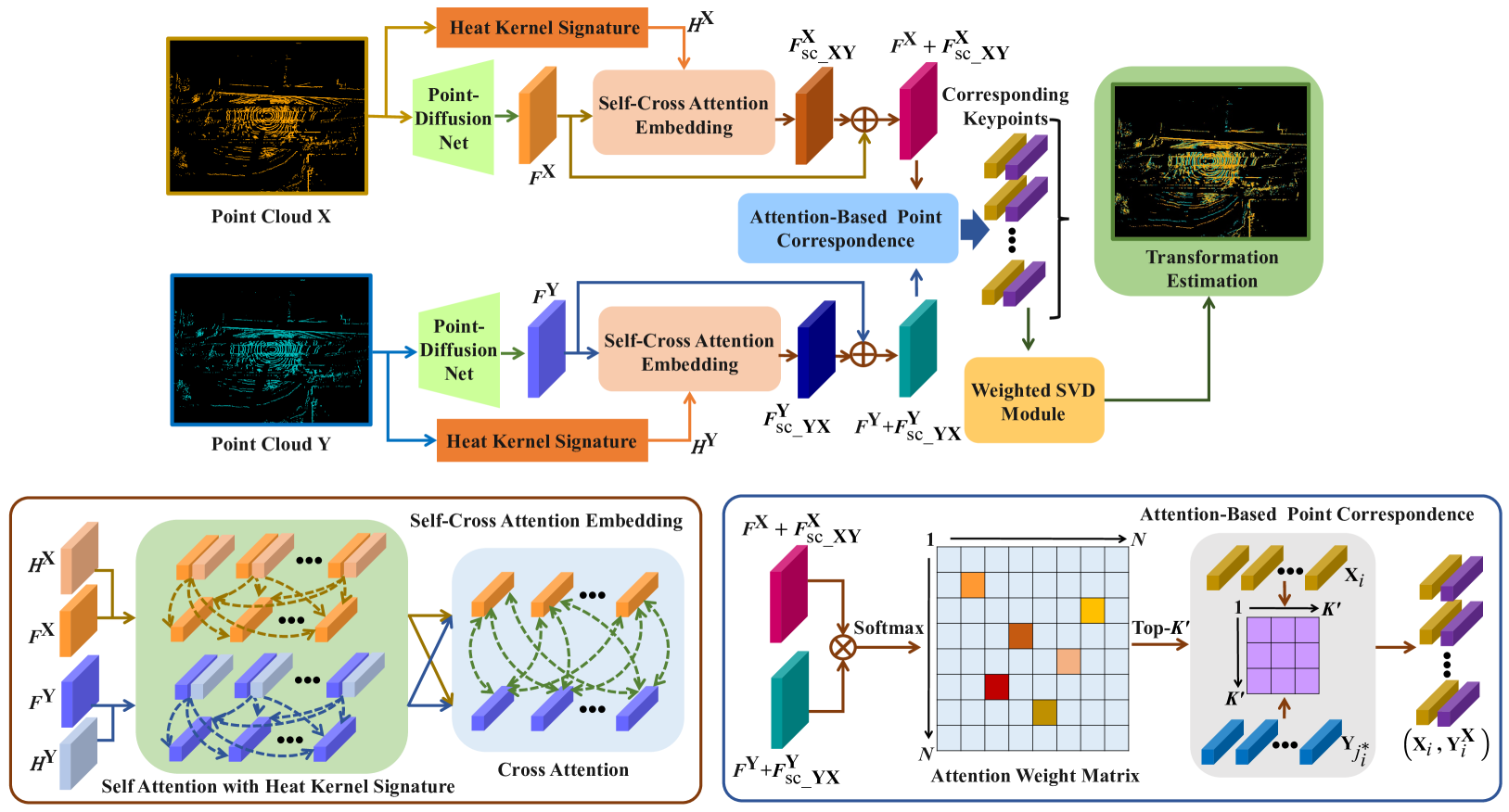
Point cloud registration is a fundamental technique in 3-D computer vision with applications in graphics, autonomous driving, and robotics. However, registration tasks under challenging conditions, under which noise or perturbations are prevalent, can be difficult. We propose a robust point cloud registration approach that leverages graph neural partial differential equations (PDEs) and heat kernel signatures. Our method first uses graph neural PDE modules to extract high dimensional features from point clouds by aggregating information from the 3-D point neighborhood, thereby enhancing the robustness of the feature representations. Then, we incorporate heat kernel signatures into an attention mechanism to efficiently obtain corresponding keypoints. Finally, a singular value decomposition (SVD) module with learnable weights is used to predict the transformation between two point clouds. Empirical experiments on a 3-D point cloud dataset demonstrate that our approach not only achieves state-of-the-art performance for point cloud registration but also exhibits better robustness to additive noise or 3-D shape perturbations.
4/23/2024
🤿
Deep Learning-based Point Cloud Registration for Augmented Reality-guided Surgery
Maximilian Weber, Daniel Wild, Jens Kleesiek, Jan Egger, Christina Gsaxner
0
0
Point cloud registration aligns 3D point clouds using spatial transformations. It is an important task in computer vision, with applications in areas such as augmented reality (AR) and medical imaging. This work explores the intersection of two research trends: the integration of AR into image-guided surgery and the use of deep learning for point cloud registration. The main objective is to evaluate the feasibility of applying deep learning-based point cloud registration methods for image-to-patient registration in augmented reality-guided surgery. We created a dataset of point clouds from medical imaging and corresponding point clouds captured with a popular AR device, the HoloLens 2. We evaluate three well-established deep learning models in registering these data pairs. While we find that some deep learning methods show promise, we show that a conventional registration pipeline still outperforms them on our challenging dataset.
5/7/2024
✨
RGBD-Glue: General Feature Combination for Robust RGB-D Point Cloud Registration
Congjia Chen, Xiaoyu Jia, Yanhong Zheng, Yufu Qu
0
0
Point cloud registration is a fundamental task for estimating rigid transformations between point clouds. Previous studies have used geometric information for extracting features, matching and estimating transformation. Recently, owing to the advancement of RGB-D sensors, researchers have attempted to utilize visual information to improve registration performance. However, these studies focused on extracting distinctive features by deep feature fusion, which cannot effectively solve the negative effects of each feature's weakness, and cannot sufficiently leverage the valid information. In this paper, we propose a new feature combination framework, which applies a looser but more effective fusion and can achieve better performance. An explicit filter based on transformation consistency is designed for the combination framework, which can overcome each feature's weakness. And an adaptive threshold determined by the error distribution is proposed to extract more valid information from the two types of features. Owing to the distinctive design, our proposed framework can estimate more accurate correspondences and is applicable to both hand-crafted and learning-based feature descriptors. Experiments on ScanNet show that our method achieves a state-of-the-art performance and the rotation accuracy of 99.1%.
5/14/2024