CON: Continual Object Navigation via Data-Free Inter-Agent Knowledge Transfer in Unseen and Unfamiliar Places

0

Sign in to get full access
Overview
- The paper presents a novel approach called CON (Continual Object Navigation) for object navigation in unseen and unfamiliar environments.
- CON leverages data-free inter-agent knowledge transfer to enable continual learning and generalization to new scenes.
- The method aims to address the challenge of object navigation in dynamic and diverse real-world settings.
Plain English Explanation
CON: Continual Object Navigation via Data-Free Inter-Agent Knowledge Transfer in Unseen and Unfamiliar Places introduces a new system that allows robots to navigate to and find specific objects, even in places they've never seen before.
The key idea is to have the robot learn from the experiences of other robots, without needing any additional training data. By sharing their knowledge, the robots can collectively build up a rich understanding of the world that allows them to adapt to new environments.
This is particularly useful for real-world scenarios, where robots may encounter a wide variety of unfamiliar settings and need to be able to quickly find the objects they're looking for. Rather than having to be painstakingly trained on every possible environment, the robots can leverage their collective intelligence to figure things out on the fly.
The paper demonstrates that this data-free knowledge transfer approach enables the robots to navigate to target objects with high accuracy, even in completely unseen environments. This could have important implications for applications like home assistance, search and rescue, and many other areas where robots need to operate flexibly in the real world.
Technical Explanation
CON: Continual Object Navigation via Data-Free Inter-Agent Knowledge Transfer in Unseen and Unfamiliar Places presents a novel framework called CON (Continual Object Navigation) that enables robots to navigate to and locate target objects in unseen and unfamiliar environments.
The core of the CON approach is a data-free knowledge transfer mechanism that allows individual agents to learn from the experiences of other agents, without requiring any additional training data. This is achieved through a specialized neural network architecture that can distill and transfer useful navigation knowledge between agents.
The paper's experimental evaluation demonstrates that CON can achieve high object navigation accuracy in completely unseen environments, outperforming baseline methods that rely on dataset-specific training. This is a significant advancement, as it allows the system to generalize well beyond the specific scenes and objects it was trained on.
Key insights from the technical evaluation include:
- CON's data-free knowledge transfer enables continual learning and adaptation to new environments
- The proposed neural network design effectively captures and transfers useful navigation knowledge between agents
- Extensive testing shows CON's strong performance in a variety of unseen and unfamiliar settings
Critical Analysis
The CON: Continual Object Navigation via Data-Free Inter-Agent Knowledge Transfer in Unseen and Unfamiliar Places paper presents a promising approach to the challenging problem of object navigation in dynamic, real-world environments.
One potential limitation is that the evaluation was conducted in simulated environments, which may not fully capture the complexities of the physical world. Further testing in real-world settings would help validate the system's practical applicability.
Additionally, the paper does not explore the scalability of the knowledge transfer mechanism as the number of agents increases. Understanding how the system performs with larger agent populations would be an important area for future research.
Finally, while the data-free aspect of the knowledge transfer is a key innovation, the paper does not provide a detailed analysis of the types of knowledge being shared between agents. A deeper examination of the learned representations and their generalization capabilities could yield additional insights.
Overall, the CON framework represents a significant step forward in enabling robots to navigate flexibly in unseen environments. With further development and real-world testing, this approach could have important applications in a wide range of domains.
Conclusion
CON: Continual Object Navigation via Data-Free Inter-Agent Knowledge Transfer in Unseen and Unfamiliar Places introduces a novel object navigation system called CON that leverages data-free knowledge transfer between agents to enable continual learning and adaptation to new environments.
The key innovation is the ability for individual agents to learn from the experiences of others, without requiring any additional training data. This allows the system to generalize well beyond the specific scenes and objects it was initially trained on, a critical capability for real-world robot navigation.
The paper's technical evaluation demonstrates the effectiveness of CON, showing strong object navigation performance in a variety of unseen and unfamiliar environments. This work represents an important step forward in enabling robots to operate flexibly and autonomously in dynamic, real-world settings.
While further testing in physical environments and analysis of the scaling properties would be valuable, the CON framework presents a promising approach to the challenging problem of continual object navigation. As robots become more prevalent in our daily lives, advancements like this will be essential for unlocking their full potential to assist and collaborate with humans.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
CON: Continual Object Navigation via Data-Free Inter-Agent Knowledge Transfer in Unseen and Unfamiliar Places
Kouki Terashima, Daiki Iwata, Kanji Tanaka
This work explores the potential of brief inter-agent knowledge transfer (KT) to enhance the robotic object goal navigation (ON) in unseen and unfamiliar environments. Drawing on the analogy of human travelers acquiring local knowledge, we propose a framework in which a traveler robot (student) communicates with local robots (teachers) to obtain ON knowledge through minimal interactions. We frame this process as a data-free continual learning (CL) challenge, aiming to transfer knowledge from a black-box model (teacher) to a new model (student). In contrast to approaches like zero-shot ON using large language models (LLMs), which utilize inherently communication-friendly natural language for knowledge representation, the other two major ON approaches -- frontier-driven methods using object feature maps and learning-based ON using neural state-action maps -- present complex challenges where data-free KT remains largely uncharted. To address this gap, we propose a lightweight, plug-and-play KT module targeting non-cooperative black-box teachers in open-world settings. Using the universal assumption that every teacher robot has vision and mobility capabilities, we define state-action history as the primary knowledge base. Our formulation leads to the development of a query-based occupancy map that dynamically represents target object locations, serving as an effective and communication-friendly knowledge representation. We validate the effectiveness of our method through experiments conducted in the Habitat environment.
Read more9/24/2024
0
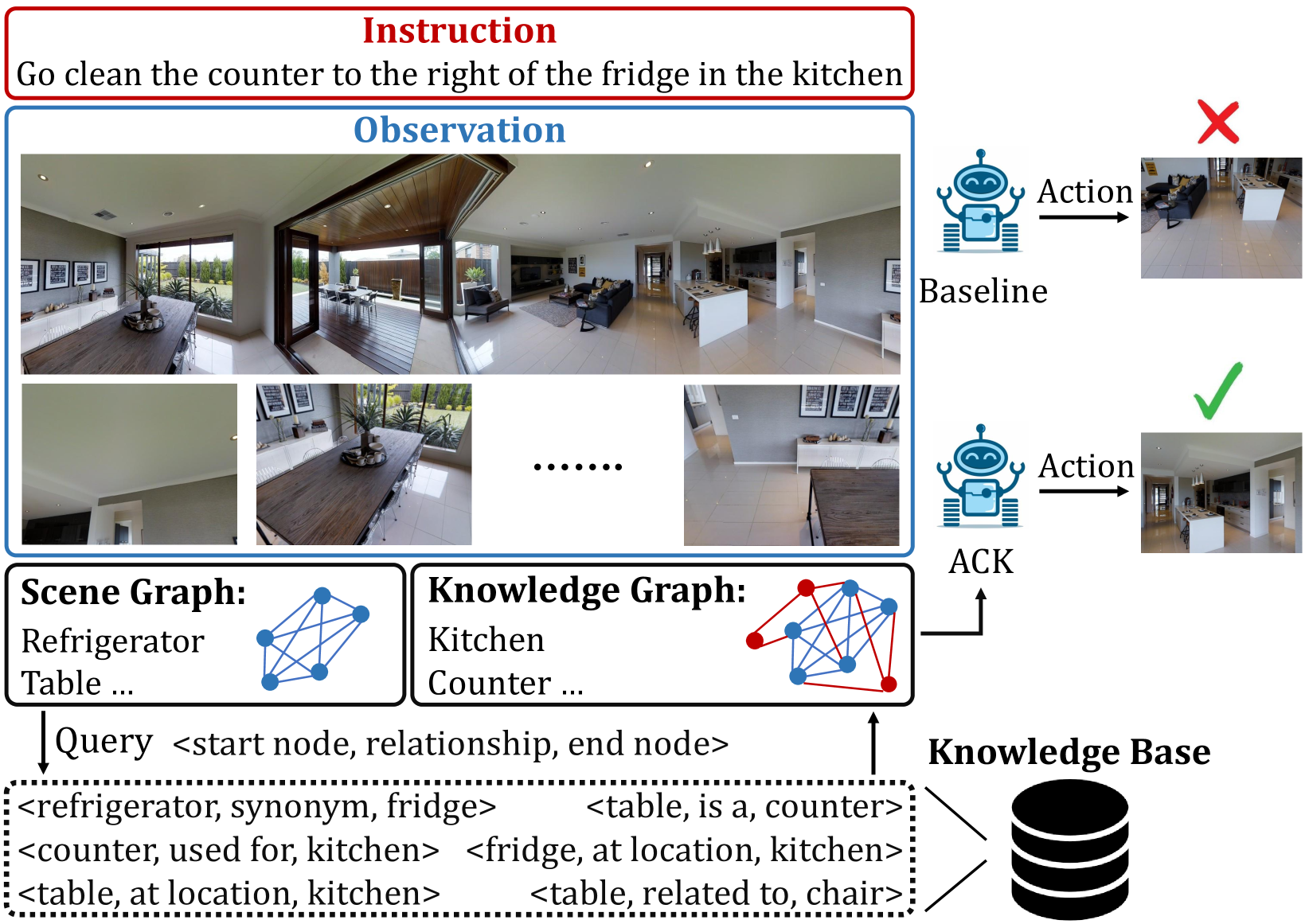
Augmented Commonsense Knowledge for Remote Object Grounding
Bahram Mohammadi, Yicong Hong, Yuankai Qi, Qi Wu, Shirui Pan, Javen Qinfeng Shi
The vision-and-language navigation (VLN) task necessitates an agent to perceive the surroundings, follow natural language instructions, and act in photo-realistic unseen environments. Most of the existing methods employ the entire image or object features to represent navigable viewpoints. However, these representations are insufficient for proper action prediction, especially for the REVERIE task, which uses concise high-level instructions, such as ''Bring me the blue cushion in the master bedroom''. To address enhancing representation, we propose an augmented commonsense knowledge model (ACK) to leverage commonsense information as a spatio-temporal knowledge graph for improving agent navigation. Specifically, the proposed approach involves constructing a knowledge base by retrieving commonsense information from ConceptNet, followed by a refinement module to remove noisy and irrelevant knowledge. We further present ACK which consists of knowledge graph-aware cross-modal and concept aggregation modules to enhance visual representation and visual-textual data alignment by integrating visible objects, commonsense knowledge, and concept history, which includes object and knowledge temporal information. Moreover, we add a new pipeline for the commonsense-based decision-making process which leads to more accurate local action prediction. Experimental results demonstrate our proposed model noticeably outperforms the baseline and archives the state-of-the-art on the REVERIE benchmark.
Read more6/4/2024

0
Reflex-Based Open-Vocabulary Navigation without Prior Knowledge Using Omnidirectional Camera and Multiple Vision-Language Models
Kento Kawaharazuka, Yoshiki Obinata, Naoaki Kanazawa, Naoto Tsukamoto, Kei Okada, Masayuki Inaba
Various robot navigation methods have been developed, but they are mainly based on Simultaneous Localization and Mapping (SLAM), reinforcement learning, etc., which require prior map construction or learning. In this study, we consider the simplest method that does not require any map construction or learning, and execute open-vocabulary navigation of robots without any prior knowledge to do this. We applied an omnidirectional camera and pre-trained vision-language models to the robot. The omnidirectional camera provides a uniform view of the surroundings, thus eliminating the need for complicated exploratory behaviors including trajectory generation. By applying multiple pre-trained vision-language models to this omnidirectional image and incorporating reflective behaviors, we show that navigation becomes simple and does not require any prior setup. Interesting properties and limitations of our method are discussed based on experiments with the mobile robot Fetch.
Read more8/22/2024
🤿
0
Think, Act, and Ask: Open-World Interactive Personalized Robot Navigation
Yinpei Dai, Run Peng, Sikai Li, Joyce Chai
Zero-Shot Object Navigation (ZSON) enables agents to navigate towards open-vocabulary objects in unknown environments. The existing works of ZSON mainly focus on following individual instructions to find generic object classes, neglecting the utilization of natural language interaction and the complexities of identifying user-specific objects. To address these limitations, we introduce Zero-shot Interactive Personalized Object Navigation (ZIPON), where robots need to navigate to personalized goal objects while engaging in conversations with users. To solve ZIPON, we propose a new framework termed Open-woRld Interactive persOnalized Navigation (ORION), which uses Large Language Models (LLMs) to make sequential decisions to manipulate different modules for perception, navigation and communication. Experimental results show that the performance of interactive agents that can leverage user feedback exhibits significant improvement. However, obtaining a good balance between task completion and the efficiency of navigation and interaction remains challenging for all methods. We further provide more findings on the impact of diverse user feedback forms on the agents' performance. Code is available at https://github.com/sled-group/navchat.
Read more5/31/2024