Think, Act, and Ask: Open-World Interactive Personalized Robot Navigation

0
🤿
Sign in to get full access
Overview
- The paper introduces Zero-shot Interactive Personalized Object Navigation (ZIPON), a new task where robots must navigate to personalized goal objects while engaging in conversations with users.
- To solve ZIPON, the researchers propose a framework called Open-woRld Interactive persOnalized Navigation (ORION) that uses Large Language Models (LLMs) to make sequential decisions for perception, navigation, and communication.
- Experimental results show that interactive agents that can leverage user feedback exhibit significant performance improvements, but balancing task completion with navigation and interaction efficiency remains challenging.
- The paper also examines the impact of diverse user feedback forms on the agents' performance.
Plain English Explanation
The paper presents a new challenge for robots called Zero-shot Interactive Personalized Object Navigation (ZIPON), where the robots must navigate to specific objects that a user wants them to find, while also having conversations with the user. This is different from previous work in Zero-Shot Object Navigation (ZSON), which only focused on finding generic object classes without user interaction.
To address this new ZIPON task, the researchers developed a framework called Open-woRld Interactive persOnalized Navigation (ORION). This framework uses powerful Large Language Models (LLMs) to help the robot make decisions about how to perceive its environment, where to navigate, and how to communicate with the user.
The experiments showed that robots that can understand and respond to feedback from users perform much better at the ZIPON task than robots that don't. However, the researchers found it is still challenging to strike the right balance between completing the task efficiently and having effective conversations with the user.
The paper also looks at how different types of user feedback can impact the robot's performance, which could help improve the design of these interactive systems in the future.
Technical Explanation
The Zero-shot Interactive Personalized Object Navigation (ZIPON) task requires robots to navigate to personalized goal objects specified by users, while also engaging in natural language interactions with those users. This is an extension of the Zero-Shot Object Navigation (ZSON) task, which only focused on finding generic object classes without user interaction.
To solve ZIPON, the researchers propose the Open-woRld Interactive persOnalized Navigation (ORION) framework, which uses Large Language Models (LLMs) to make sequential decisions for perception, navigation, and communication. The LLMs enable the agents to understand natural language instructions, perceive the environment, plan navigation routes, and engage in dialogue with users.
Experimental results show that interactive agents leveraging user feedback exhibit significant performance improvements compared to non-interactive agents. However, the researchers found that obtaining a good balance between task completion and the efficiency of navigation and interaction remains a challenge for all methods.
The paper also provides insights into the impact of diverse user feedback forms on the agents' performance. Different types of feedback, such as corrections, affirmations, or clarifications, can influence the agents' ability to understand the user's intent and navigate effectively.
Critical Analysis
The paper provides a valuable contribution by introducing the ZIPON task and the ORION framework, which expand the capabilities of embodied AI agents beyond generic object navigation to include personalized goal-oriented navigation with natural language interaction.
One key limitation mentioned in the paper is the difficulty in achieving the right balance between task completion and the efficiency of navigation and interaction. The researchers acknowledge that this remains a challenging problem for all the methods they tested. Improving the agents' ability to prioritize and optimize these competing objectives is an important area for future research.
Additionally, the paper only examines the impact of different user feedback forms in a limited capacity. Further research could explore more diverse and complex interaction dynamics, such as how the agents respond to conflicting or ambiguous user feedback, and how to maintain smooth and natural conversations over extended periods.
Another aspect that could be explored is the agents' ability to learn and adapt their behavior over multiple interactions with the same user. Developing personalized models that can build on past experiences and develop a deeper understanding of the user's preferences and communication style could lead to even more effective and efficient ZIPON performance.
Overall, the ZIPON task and the ORION framework presented in this paper represent an important step forward in embodied AI and language-driven navigation, with promising implications for real-world applications where robots need to interact with and assist human users.
Conclusion
The Zero-shot Interactive Personalized Object Navigation (ZIPON) task and the Open-woRld Interactive persOnalized Navigation (ORION) framework introduced in this paper represent a significant advancement in the field of embodied AI. By enabling robots to navigate to personalized goal objects while engaging in natural language interactions with users, the researchers have expanded the capabilities of these systems beyond generic object recognition and navigation.
The experimental results demonstrate the value of incorporating user feedback, as interactive agents exhibit substantial performance improvements compared to non-interactive approaches. However, the challenge of balancing task completion with efficient navigation and interaction remains an important area for future research.
The paper also provides insights into the impact of diverse user feedback forms on the agents' performance, which could inform the design of more effective and natural language-driven embodied AI systems. As the field continues to evolve, these advancements in zero-shot object navigation, interactive personalization, and language-grounded decision-making will be crucial in realizing the full potential of robots and other embodied AI agents to assist and collaborate with human users in a wide range of real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤿
0
Think, Act, and Ask: Open-World Interactive Personalized Robot Navigation
Yinpei Dai, Run Peng, Sikai Li, Joyce Chai
Zero-Shot Object Navigation (ZSON) enables agents to navigate towards open-vocabulary objects in unknown environments. The existing works of ZSON mainly focus on following individual instructions to find generic object classes, neglecting the utilization of natural language interaction and the complexities of identifying user-specific objects. To address these limitations, we introduce Zero-shot Interactive Personalized Object Navigation (ZIPON), where robots need to navigate to personalized goal objects while engaging in conversations with users. To solve ZIPON, we propose a new framework termed Open-woRld Interactive persOnalized Navigation (ORION), which uses Large Language Models (LLMs) to make sequential decisions to manipulate different modules for perception, navigation and communication. Experimental results show that the performance of interactive agents that can leverage user feedback exhibits significant improvement. However, obtaining a good balance between task completion and the efficiency of navigation and interaction remains challenging for all methods. We further provide more findings on the impact of diverse user feedback forms on the agents' performance. Code is available at https://github.com/sled-group/navchat.
Read more5/31/2024
0
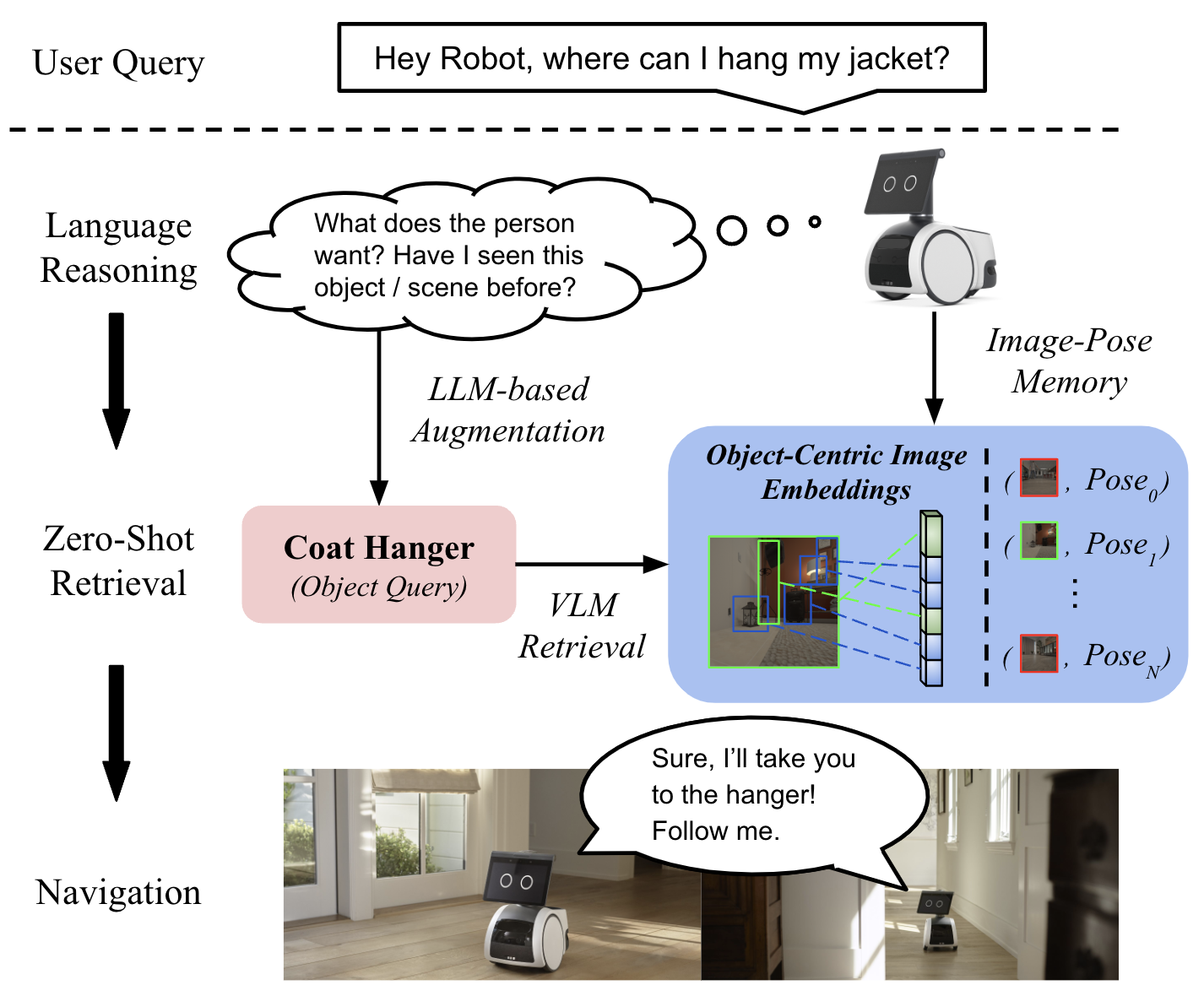
LOC-ZSON: Language-driven Object-Centric Zero-Shot Object Retrieval and Navigation
Tianrui Guan, Yurou Yang, Harry Cheng, Muyuan Lin, Richard Kim, Rajasimman Madhivanan, Arnie Sen, Dinesh Manocha
In this paper, we present LOC-ZSON, a novel Language-driven Object-Centric image representation for object navigation task within complex scenes. We propose an object-centric image representation and corresponding losses for visual-language model (VLM) fine-tuning, which can handle complex object-level queries. In addition, we design a novel LLM-based augmentation and prompt templates for stability during training and zero-shot inference. We implement our method on Astro robot and deploy it in both simulated and real-world environments for zero-shot object navigation. We show that our proposed method can achieve an improvement of 1.38 - 13.38% in terms of text-to-image recall on different benchmark settings for the retrieval task. For object navigation, we show the benefit of our approach in simulation and real world, showing 5% and 16.67% improvement in terms of navigation success rate, respectively.
Read more5/10/2024

0
InstructNav: Zero-shot System for Generic Instruction Navigation in Unexplored Environment
Yuxing Long, Wenzhe Cai, Hongcheng Wang, Guanqi Zhan, Hao Dong
Enabling robots to navigate following diverse language instructions in unexplored environments is an attractive goal for human-robot interaction. However, this goal is challenging because different navigation tasks require different strategies. The scarcity of instruction navigation data hinders training an instruction navigation model with varied strategies. Therefore, previous methods are all constrained to one specific type of navigation instruction. In this work, we propose InstructNav, a generic instruction navigation system. InstructNav makes the first endeavor to handle various instruction navigation tasks without any navigation training or pre-built maps. To reach this goal, we introduce Dynamic Chain-of-Navigation (DCoN) to unify the planning process for different types of navigation instructions. Furthermore, we propose Multi-sourced Value Maps to model key elements in instruction navigation so that linguistic DCoN planning can be converted into robot actionable trajectories. With InstructNav, we complete the R2R-CE task in a zero-shot way for the first time and outperform many task-training methods. Besides, InstructNav also surpasses the previous SOTA method by 10.48% on the zero-shot Habitat ObjNav and by 86.34% on demand-driven navigation DDN. Real robot experiments on diverse indoor scenes further demonstrate our method's robustness in coping with the environment and instruction variations.
Read more6/10/2024

0
Online Robot Navigation and Manipulation with Distilled Vision-Language Models
Kangcheng Liu
Autonomous robot navigation within the dynamic unknown environment is of crucial significance for mobile robotic applications including robot navigation in last-mile delivery and robot-enabled automated supplies in industrial and hospital delivery applications. Current solutions still suffer from limitations, such as the robot cannot recognize unknown objects in real-time and cannot navigate freely in a dynamic, narrow, and complex environment. We propose a complete software framework for autonomous robot perception and navigation within very dense obstacles and dense human crowds. First, we propose a framework that accurately detects and segments open-world object categories in a zero-shot manner, which overcomes the over-segmentation limitation of the current SAM model. Second, we proposed the distillation strategy to distill the knowledge to segment the free space of the walkway for robot navigation without the label. In the meantime, we design the trimming strategy that works collaboratively with distillation to enable lightweight inference to deploy the neural network on edge devices such as NVIDIA-TX2 or Xavier NX during autonomous navigation. Integrated into the robot navigation system, extensive experiments demonstrate that our proposed framework has achieved superior performance in terms of both accuracy and efficiency in robot scene perception and autonomous robot navigation.
Read more5/14/2024