Configuring Safe Spiking Neural Controllers for Cyber-Physical Systems through Formal Verification

0
Sign in to get full access
Overview
- Configuring safe spiking neural controllers for cyber-physical systems through formal verification
- Focuses on ensuring the safety and reliability of spiking neural networks (SNNs) used in control systems
- Proposes a method for computing safe ranges for SNN weights and biases to guarantee safe operation
Plain English Explanation
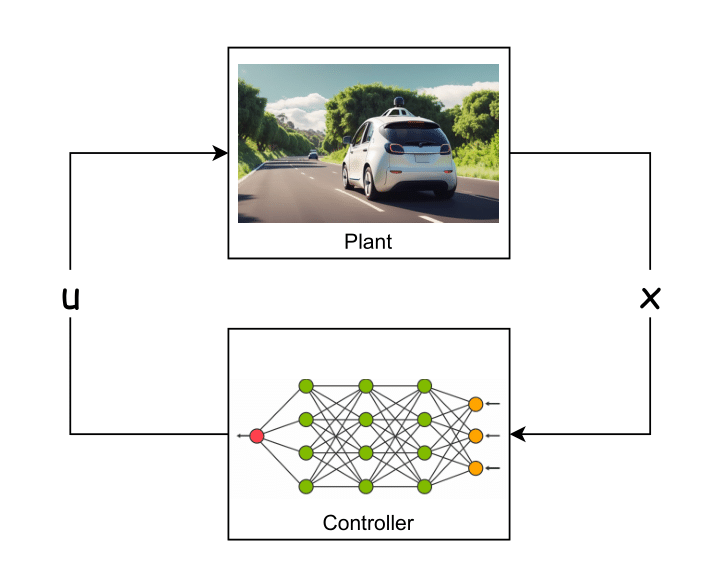
The paper explores ways to make spiking neural networks (SNNs) - a type of artificial intelligence inspired by the brain - safer and more reliable for use in cyber-physical systems like self-driving cars or industrial robots. Cyber-physical systems are where the digital world (computers, software) interacts directly with the physical world, so safety is critical.
The key idea is to use formal verification - a mathematical approach to prove certain properties about a system - to determine "safe ranges" for the weights and biases within the SNN. This ensures the neural network will always produce outputs that keep the cyber-physical system operating within safe parameters, even in the face of unexpected conditions or disturbances.
By rigorously analyzing the SNN and computing these safe ranges, the researchers aim to provide a way to configure spiking neural controllers that are provably safe for critical cyber-physical applications. This could help enable the safe and reliable deployment of advanced AI systems in the real world.
Technical Explanation
The paper proposes a method for computing safe ranges for the weights and biases in a spiking neural network (SNN) used as a controller for a cyber-physical system. This is achieved through formal verification - mathematically proving that the SNN will always produce outputs within a specified "safe" range, even under different operating conditions.
The key steps are:
- Model the SNN: Represent the SNN as a set of differential equations capturing the dynamics of the spiking neurons and their interconnections.
- Compute Safe Ranges: Use techniques from control theory and optimization to derive mathematical constraints that guarantee the SNN outputs will remain within safe limits.
- Configure the SNN: Adjust the SNN's weights and biases to satisfy the computed safe range constraints, ensuring safe operation.
The authors demonstrate their approach on a case study involving an SNN controlling a cart-pole system - a classic problem in control theory. By verifying the safe ranges, they are able to configure the SNN controller to reliably keep the cart-pole system balanced, even when subjected to disturbances.
Critical Analysis
The paper presents a rigorous, formal approach to ensuring the safety of spiking neural networks used in cyber-physical control systems. The use of verification techniques to derive provable safety guarantees is a key strength, as it addresses a major challenge in deploying AI systems in high-stakes applications.
However, the proposed method does rely on several simplifying assumptions, such as a specific spiking neuron model and a restricted class of activation functions. Extending the verification approach to handle more complex SNN architectures and dynamics could be an area for future research.
Additionally, the paper focuses on computing safe ranges for the SNN parameters (weights and biases), but does not address how to actually find parameter values that satisfy these ranges. Developing efficient optimization or training techniques to configure "safe" SNNs could be another valuable direction.
Overall, this work represents an important step towards building hybrid B-spline neural network operators and cloud-edge frameworks that can leverage the benefits of spiking neural networks while providing strong safety guarantees for cyber-physical applications.
Conclusion
This paper presents a formal verification-based approach to configuring safe spiking neural network (SNN) controllers for cyber-physical systems. By mathematically deriving constraints on the SNN weights and biases to guarantee safe operation, the researchers aim to enable the reliable deployment of advanced AI systems in mission-critical applications.
The work addresses a key challenge in bridging the gap between the powerful capabilities of SNNs and the stringent safety requirements of cyber-physical systems. While the proposed method has some limitations, it represents an important step towards realizing the full potential of spiking neural networks in the real world, with strong safety assurances built-in from the ground up.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Configuring Safe Spiking Neural Controllers for Cyber-Physical Systems through Formal Verification
Arkaprava Gupta, Sumana Ghosh, Ansuman Banerjee, Swarup Kumar Mohalik
Spiking Neural Networks (SNNs) are a subclass of neuromorphic models that have great potential to be used as controllers in Cyber-Physical Systems (CPSs) due to their energy efficiency. They can benefit from the prevalent approach of first training an Artificial Neural Network (ANN) and then translating to an SNN with subsequent hyperparameter tuning. The tuning is required to ensure that the resulting SNN is accurate with respect to the ANN in terms of metrics like Mean Squared Error (MSE). However, SNN controllers for safety-critical CPSs must also satisfy safety specifications, which are not guaranteed by the conversion approach. In this paper, we propose a solution which tunes the $temporal$ $window$ hyperparameter of the translated SNN to ensure both accuracy and compliance with the safe range specification that requires the SNN outputs to remain within a safe range. The core verification problem is modelled using mixed-integer linear programming (MILP) and is solved with Gurobi. When the controller fails to meet the range specification, we compute tight bounds on the SNN outputs as feedback for the CPS developer. To mitigate the high computational cost of verification, we integrate data-driven steps to minimize verification calls. Our approach provides designers with the confidence to safely integrate energy-efficient SNN controllers into modern CPSs. We demonstrate our approach with experimental results on five different benchmark neural controllers.
Read more8/6/2024

0
Towards Efficient Formal Verification of Spiking Neural Network
Baekryun Seong, Jieung Kim, Sang-Ki Ko
Recently, AI research has primarily focused on large language models (LLMs), and increasing accuracy often involves scaling up and consuming more power. The power consumption of AI has become a significant societal issue; in this context, spiking neural networks (SNNs) offer a promising solution. SNNs operate event-driven, like the human brain, and compress information temporally. These characteristics allow SNNs to significantly reduce power consumption compared to perceptron-based artificial neural networks (ANNs), highlighting them as a next-generation neural network technology. However, societal concerns regarding AI go beyond power consumption, with the reliability of AI models being a global issue. For instance, adversarial attacks on AI models are a well-studied problem in the context of traditional neural networks. Despite their importance, the stability and property verification of SNNs remains in the early stages of research. Most SNN verification methods are time-consuming and barely scalable, making practical applications challenging. In this paper, we introduce temporal encoding to achieve practical performance in verifying the adversarial robustness of SNNs. We conduct a theoretical analysis of this approach and demonstrate its success in verifying SNNs at previously unmanageable scales. Our contribution advances SNN verification to a practical level, facilitating the safer application of SNNs.
Read more8/21/2024

0
Robust Stable Spiking Neural Networks
Jianhao Ding, Zhiyu Pan, Yujia Liu, Zhaofei Yu, Tiejun Huang
Spiking neural networks (SNNs) are gaining popularity in deep learning due to their low energy budget on neuromorphic hardware. However, they still face challenges in lacking sufficient robustness to guard safety-critical applications such as autonomous driving. Many studies have been conducted to defend SNNs from the threat of adversarial attacks. This paper aims to uncover the robustness of SNN through the lens of the stability of nonlinear systems. We are inspired by the fact that searching for parameters altering the leaky integrate-and-fire dynamics can enhance their robustness. Thus, we dive into the dynamics of membrane potential perturbation and simplify the formulation of the dynamics. We present that membrane potential perturbation dynamics can reliably convey the intensity of perturbation. Our theoretical analyses imply that the simplified perturbation dynamics satisfy input-output stability. Thus, we propose a training framework with modified SNN neurons and to reduce the mean square of membrane potential perturbation aiming at enhancing the robustness of SNN. Finally, we experimentally verify the effectiveness of the framework in the setting of Gaussian noise training and adversarial training on the image classification task.
Read more6/3/2024
🧠
0
Provably Safe Neural Network Controllers via Differential Dynamic Logic
Samuel Teuber, Stefan Mitsch, Andr'e Platzer
While neural networks (NNs) have potential as autonomous controllers for Cyber-Physical Systems, verifying the safety of NN based control systems (NNCSs) poses significant challenges for the practical use of NNs, especially when safety is needed for unbounded time horizons. One reason is the intractability of analyzing NNs, ODEs and hybrid systems. To this end, we introduce VerSAILLE (Verifiably Safe AI via Logically Linked Envelopes): The first general approach that allows reusing control theory results for NNCS verification. By joining forces, we exploit the efficiency of NN verification tools while retaining the rigor of differential dynamic logic (dL). Based on provably safe control envelopes in dL, we derive specifications for the NN which is proven via NN verification. We show that a proof of the NN adhering to the specification is mirrored by a dL proof on the infinite-time safety of the NNCS. The NN verification properties resulting from hybrid systems typically contain nonlinear arithmetic and arbitrary logical structures while efficient NN verification merely supports linear constraints. To overcome this divide, we present Mosaic: An efficient, sound and complete verification approach for polynomial real arithmetic properties on piece-wise linear NNs. Mosaic partitions complex verification queries into simple queries and lifts off-the-shelf linear constraint tools to the nonlinear setting in a completeness-preserving manner by combining approximation with exact reasoning for counterexample regions. Our evaluation demonstrates the versatility of VerSAILLE and Mosaic: We prove infinite-time safety on the classical Vertical Airborne Collision Avoidance NNCS verification benchmark for two scenarios while (exhaustively) enumerating counterexample regions in unsafe scenarios. We also show that our approach significantly outperforms State-of-the-Art tools in closed-loop NNV.
Read more6/17/2024