Building Hybrid B-Spline And Neural Network Operators

0

Sign in to get full access
Overview
- This paper presents a novel approach to building hybrid operators that combine B-spline functions and neural networks for modeling complex systems.
- The proposed method aims to leverage the strengths of both B-splines (for capturing smooth nonlinearities) and neural networks (for universal function approximation) to achieve improved modeling accuracy and computational efficiency.
- The paper includes detailed experiments and analyses to demonstrate the effectiveness of the hybrid approach on various benchmark problems.
Plain English Explanation
The researchers in this paper have come up with a new way to model complex systems by combining two powerful mathematical tools: B-spline functions and neural networks.
B-splines are great at capturing smooth, nonlinear behaviors, while neural networks are very good at approximating any function, even if it's highly complex. By bringing these two approaches together, the researchers believe they can create "hybrid operators" that can model real-world systems more accurately and efficiently than using either B-splines or neural networks alone.
The paper describes how they developed this hybrid approach and then tested it on several benchmark problems. The results show that the hybrid operators perform better than traditional methods, especially when dealing with complex nonlinearities. This could be useful for a wide range of applications, from enhancing planning with physics-informed safety controllers to enabling real-time safe control of nonlinear systems.
Technical Explanation
The key idea behind the proposed approach is to combine the strengths of B-spline functions and neural networks to create a hybrid operator that can model complex nonlinear systems more effectively. B-splines are well-suited for capturing smooth nonlinearities, while neural networks are known for their universal function approximation capabilities.
The authors first provide the necessary background on B-splines and neural networks, explaining their mathematical formulations and properties. They then introduce the hybrid operator, which is constructed by representing the neural network component as a linear combination of B-spline basis functions. This allows the hybrid operator to leverage the interpretability and computational efficiency of B-splines, while still benefiting from the flexibility of neural networks.
To demonstrate the effectiveness of the hybrid approach, the authors conduct extensive experiments on various benchmark problems, including function approximation, system identification, and control tasks. The results show that the hybrid operators consistently outperform traditional B-spline and neural network models in terms of modeling accuracy and computational efficiency.
Furthermore, the authors analyze the structure of the learned hybrid operators and provide insights into how the B-spline and neural network components interact to capture the underlying system dynamics. They also discuss the potential for learning to boost the performance of stable nonlinear systems using the proposed hybrid approach.
Critical Analysis
The paper presents a well-designed and thoroughly evaluated approach to building hybrid operators that combine the strengths of B-splines and neural networks. The authors have done a commendable job in demonstrating the effectiveness of the hybrid approach through extensive experiments on diverse benchmark problems.
One potential limitation of the proposed method is the need to carefully select the B-spline basis functions and hyperparameters, which can be a time-consuming process and may require domain expertise. The authors acknowledge this challenge and suggest that further research is needed to automate the selection of these parameters.
Additionally, while the paper focuses on the modeling accuracy and computational efficiency of the hybrid operators, it does not explore the interpretability aspect in depth. Interpretability is an important consideration, especially for applications where explainability is crucial, such as in system-level safety-guard for safe tracking control. Future research could investigate ways to enhance the interpretability of the hybrid operators, perhaps by leveraging the inherent interpretability of B-spline functions.
Overall, this paper presents a promising approach to building hybrid operators that can effectively model complex nonlinear systems. The results are convincing, and the ideas discussed have the potential to contribute to the broader field of neural network-based hybrid systems and safe control of nonlinear systems.
Conclusion
This paper introduces a novel approach to building hybrid operators that combine the strengths of B-spline functions and neural networks. The proposed method aims to leverage the smooth nonlinearity modeling capabilities of B-splines and the universal function approximation power of neural networks to achieve improved modeling accuracy and computational efficiency.
The key contribution of this work is the development of the hybrid operator framework, which represents the neural network component as a linear combination of B-spline basis functions. The authors demonstrate the effectiveness of this approach through extensive experiments on various benchmark problems, highlighting the advantages of the hybrid operators over traditional B-spline and neural network models.
The ideas presented in this paper have the potential to impact a wide range of applications, from enhancing planning with physics-informed safety controllers to learning to boost the performance of stable nonlinear systems. The proposed hybrid approach could also be further explored in the context of system-level safety-guard for safe tracking control and real-time safe control of nonlinear systems, potentially leading to advancements in the field of hybrid systems modeling and control.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Building Hybrid B-Spline And Neural Network Operators
Raffaele Romagnoli, Jasmine Ratchford, Mark H. Klein
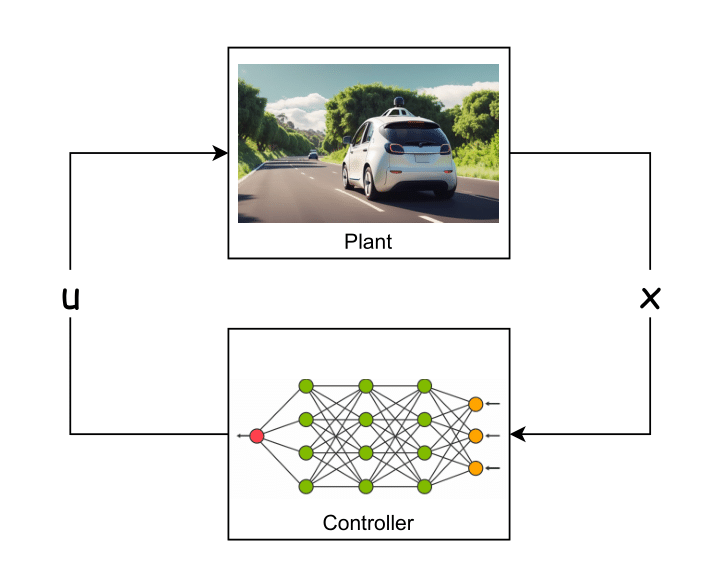
Control systems are indispensable for ensuring the safety of cyber-physical systems (CPS), spanning various domains such as automobiles, airplanes, and missiles. Safeguarding CPS necessitates runtime methodologies that continuously monitor safety-critical conditions and respond in a verifiably safe manner. A fundamental aspect of many safety approaches involves predicting the future behavior of systems. However, achieving this requires accurate models that can operate in real time. Motivated by DeepONets, we propose a novel strategy that combines the inductive bias of B-splines with data-driven neural networks to facilitate real-time predictions of CPS behavior. We introduce our hybrid B-spline neural operator, establishing its capability as a universal approximator and providing rigorous bounds on the approximation error. These findings are applicable to a broad class of nonlinear autonomous systems and are validated through experimentation on a controlled 6-degree-of-freedom (DOF) quadrotor with a 12 dimensional state space. Furthermore, we conduct a comparative analysis of different network architectures, specifically fully connected networks (FCNN) and recurrent neural networks (RNN), to elucidate the practical utility and trade-offs associated with each architecture in real-world scenarios.
Read more6/12/2024
0
Configuring Safe Spiking Neural Controllers for Cyber-Physical Systems through Formal Verification
Arkaprava Gupta, Sumana Ghosh, Ansuman Banerjee, Swarup Kumar Mohalik
Spiking Neural Networks (SNNs) are a subclass of neuromorphic models that have great potential to be used as controllers in Cyber-Physical Systems (CPSs) due to their energy efficiency. They can benefit from the prevalent approach of first training an Artificial Neural Network (ANN) and then translating to an SNN with subsequent hyperparameter tuning. The tuning is required to ensure that the resulting SNN is accurate with respect to the ANN in terms of metrics like Mean Squared Error (MSE). However, SNN controllers for safety-critical CPSs must also satisfy safety specifications, which are not guaranteed by the conversion approach. In this paper, we propose a solution which tunes the $temporal$ $window$ hyperparameter of the translated SNN to ensure both accuracy and compliance with the safe range specification that requires the SNN outputs to remain within a safe range. The core verification problem is modelled using mixed-integer linear programming (MILP) and is solved with Gurobi. When the controller fails to meet the range specification, we compute tight bounds on the SNN outputs as feedback for the CPS developer. To mitigate the high computational cost of verification, we integrate data-driven steps to minimize verification calls. Our approach provides designers with the confidence to safely integrate energy-efficient SNN controllers into modern CPSs. We demonstrate our approach with experimental results on five different benchmark neural controllers.
Read more8/6/2024
0
A neural network-based approach to hybrid systems identification for control
Filippo Fabiani, Bartolomeo Stellato, Daniele Masti, Paul J. Goulart
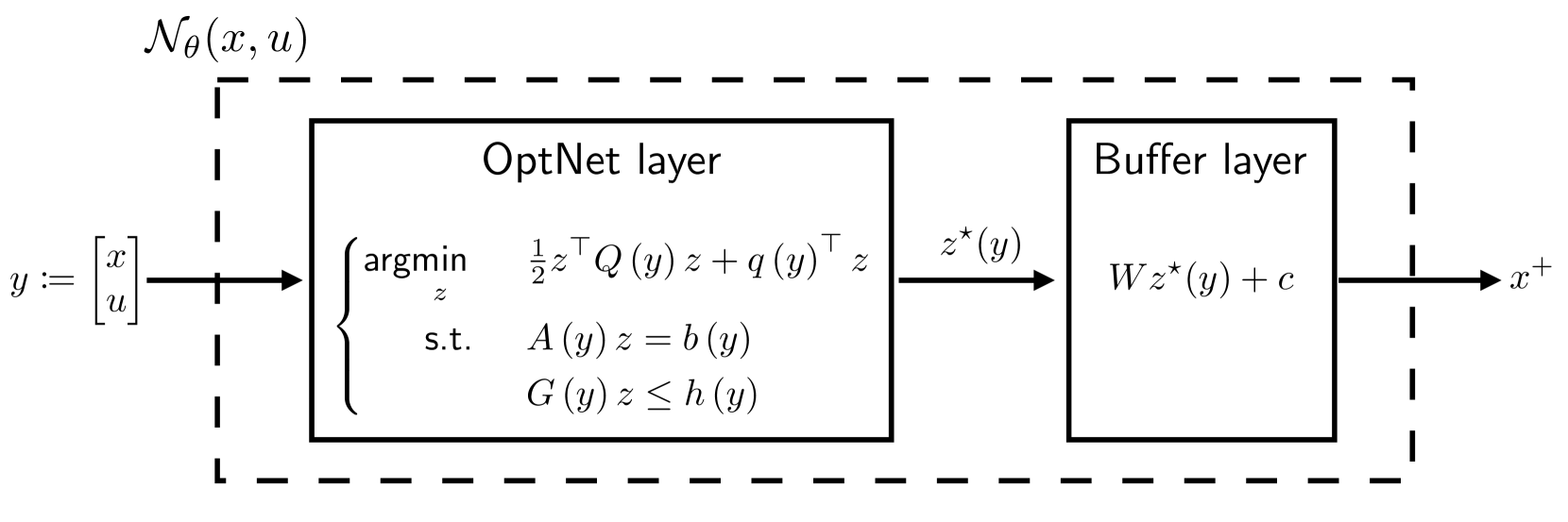
We consider the problem of designing a machine learning-based model of an unknown dynamical system from a finite number of (state-input)-successor state data points, such that the model obtained is also suitable for optimal control design. We propose a specific neural network (NN) architecture that yields a hybrid system with piecewise-affine dynamics that is differentiable with respect to the network's parameters, thereby enabling the use of derivative-based training procedures. We show that a careful choice of our NN's weights produces a hybrid system model with structural properties that are highly favourable when used as part of a finite horizon optimal control problem (OCP). Specifically, we show that optimal solutions with strong local optimality guarantees can be computed via nonlinear programming, in contrast to classical OCPs for general hybrid systems which typically require mixed-integer optimization. In addition to being well-suited for optimal control design, numerical simulations illustrate that our NN-based technique enjoys very similar performance to state-of-the-art system identification methodologies for hybrid systems and it is competitive on nonlinear benchmarks.
Read more4/3/2024

0
System-level Safety Guard: Safe Tracking Control through Uncertain Neural Network Dynamics Models
Xiao Li, Yutong Li, Anouck Girard, Ilya Kolmanovsky
The Neural Network (NN), as a black-box function approximator, has been considered in many control and robotics applications. However, difficulties in verifying the overall system safety in the presence of uncertainties hinder the deployment of NN modules in safety-critical systems. In this paper, we leverage the NNs as predictive models for trajectory tracking of unknown dynamical systems. We consider controller design in the presence of both intrinsic uncertainty and uncertainties from other system modules. In this setting, we formulate the constrained trajectory tracking problem and show that it can be solved using Mixed-integer Linear Programming (MILP). The proposed MILP-based approach is empirically demonstrated in robot navigation and obstacle avoidance through simulations. The demonstration videos are available at https://xiaolisean.github.io/publication/2023-11-01-L4DC2024.
Read more5/21/2024