Diving Deeper Into Pedestrian Behavior Understanding: Intention Estimation, Action Prediction, and Event Risk Assessment

0

Sign in to get full access
Overview
- This paper explores pedestrian behavior understanding, focusing on three key aspects: intention estimation, action prediction, and event risk assessment.
- The researchers aim to develop advanced techniques for analyzing and predicting pedestrian behavior in real-world scenarios, which has important applications in areas like autonomous vehicles and urban planning.
Plain English Explanation
The paper delves into the complex topic of understanding how pedestrians behave and move around in the real world. The researchers are particularly interested in three main areas:
- Intention Estimation: Figuring out what a pedestrian intends to do, like whether they plan to cross the street or continue walking.
- Action Prediction: Forecasting what actions a pedestrian will take in the near future, such as stopping, turning, or changing speed.
- Event Risk Assessment: Evaluating the potential risks associated with a pedestrian's behavior, which could help identify dangerous situations like collisions or traffic incidents.
By developing advanced techniques in these areas, the researchers hope to create systems that can better understand and anticipate pedestrian behavior. This could have important applications in fields like autonomous vehicles, where being able to predict and respond to pedestrian actions is crucial for safe navigation.
Technical Explanation
The paper reviews the existing research on pedestrian behavior understanding, including work on intention estimation, action prediction, and event risk assessment. The researchers identify several limitations in the current state of the art and propose new approaches to address these challenges.
For intention estimation, the authors suggest integrating more contextual information, such as environmental factors and social interactions, to improve the accuracy of intention predictions. In the action prediction domain, they propose developing models that can capture the complex, multi-modal nature of pedestrian behavior, incorporating visual, kinematic, and semantic cues.
To assess event risks, the researchers explore the use of multi-modal AI techniques that can fuse sensor data from various sources, including cameras, LiDAR, and radar, to build a comprehensive understanding of the surrounding environment and potential hazards.
The paper outlines the experimental design, dataset, and evaluation metrics used to validate the proposed approaches, demonstrating their effectiveness in improving pedestrian behavior understanding compared to existing methods.
Critical Analysis
The paper presents a comprehensive and well-designed study, addressing important limitations in the current state of the art. The researchers' focus on integrating contextual information and multi-modal data for intention estimation, action prediction, and event risk assessment is a promising direction that could lead to significant advancements in pedestrian behavior understanding.
However, the paper does not fully address the potential challenges and limitations of the proposed approaches. For example, the authors could have discussed the scalability and computational requirements of the multi-modal fusion techniques, or the potential biases and generalization issues that may arise when working with real-world, uncontrolled pedestrian data.
Additionally, the paper could have explored the ethical implications of these technologies, particularly in the context of autonomous vehicles and their interactions with vulnerable road users. Issues such as bias, transparency, and accountability should be carefully considered as these systems become more widely deployed.
Conclusion
This paper makes valuable contributions to the field of pedestrian behavior understanding by proposing advanced techniques for intention estimation, action prediction, and event risk assessment. The integration of contextual information and multi-modal data holds promise for developing more accurate and comprehensive models of pedestrian behavior, which could have significant implications for applications like autonomous vehicles and urban planning.
However, the researchers should also address the potential limitations and ethical concerns associated with these technologies to ensure they are developed and deployed responsibly. Overall, this work represents an important step forward in the quest to create safer and more intelligent systems for navigating and interacting with pedestrians in the real world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Diving Deeper Into Pedestrian Behavior Understanding: Intention Estimation, Action Prediction, and Event Risk Assessment
Amir Rasouli, Iuliia Kotseruba
In this paper, we delve into the pedestrian behavior understanding problem from the perspective of three different tasks: intention estimation, action prediction, and event risk assessment. We first define the tasks and discuss how these tasks are represented and annotated in two widely used pedestrian datasets, JAAD and PIE. We then propose a new benchmark based on these definitions, available annotations, and three new classes of metrics, each designed to assess different aspects of the model performance. We apply the new evaluation approach to examine four SOTA prediction models on each task and compare their performance w.r.t. metrics and input modalities. In particular, we analyze the differences between intention estimation and action prediction tasks by considering various scenarios and contextual factors. Lastly, we examine model agreement across these two tasks to show their complementary role. The proposed benchmark reveals new facts about the role of different data modalities, the tasks, and relevant data properties. We conclude by elaborating on our findings and proposing future research directions.
Read more7/2/2024
0
Context-aware Multi-task Learning for Pedestrian Intent and Trajectory Prediction
Farzeen Munir, Tomasz Piotr Kucner
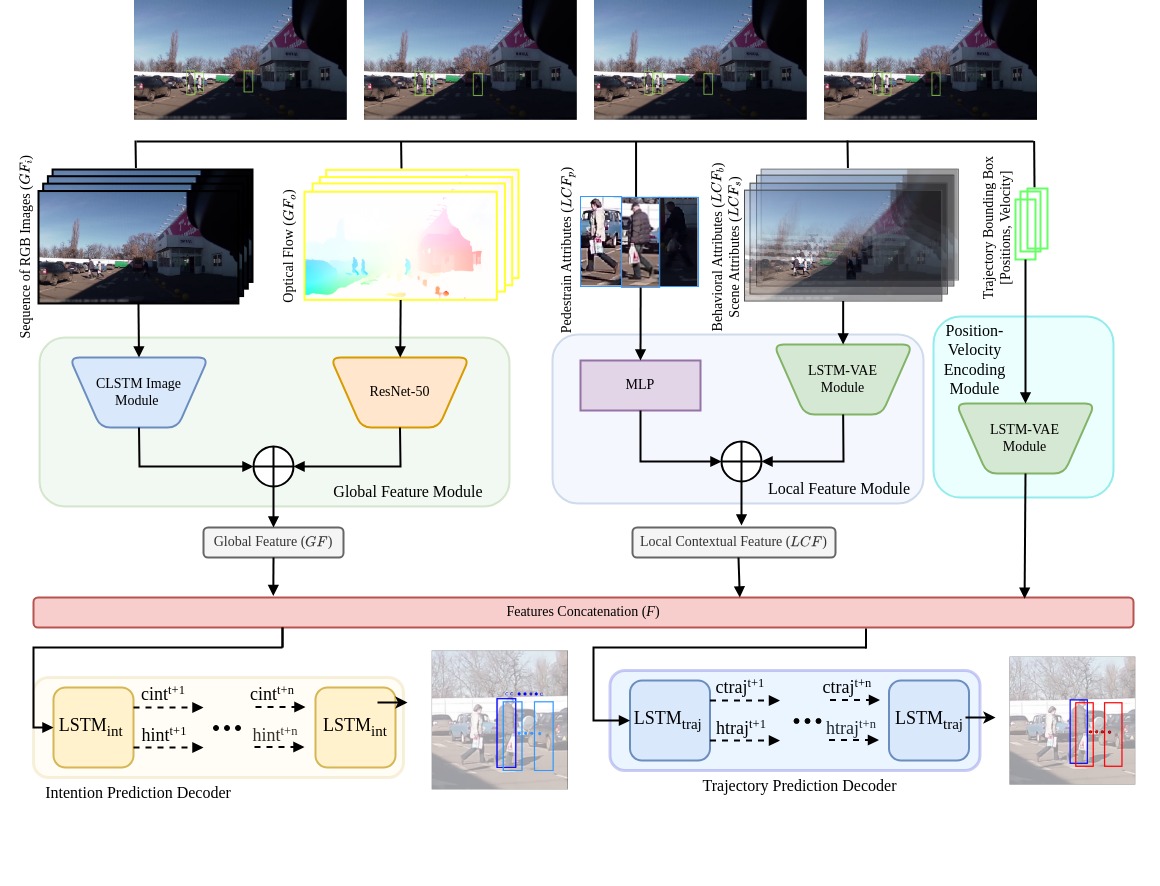
The advancement of socially-aware autonomous vehicles hinges on precise modeling of human behavior. Within this broad paradigm, the specific challenge lies in accurately predicting pedestrian's trajectory and intention. Traditional methodologies have leaned heavily on historical trajectory data, frequently overlooking vital contextual cues such as pedestrian-specific traits and environmental factors. Furthermore, there's a notable knowledge gap as trajectory and intention prediction have largely been approached as separate problems, despite their mutual dependence. To bridge this gap, we introduce PTINet (Pedestrian Trajectory and Intention Prediction Network), which jointly learns the trajectory and intention prediction by combining past trajectory observations, local contextual features (individual pedestrian behaviors), and global features (signs, markings etc.). The efficacy of our approach is evaluated on widely used public datasets: JAAD and PIE, where it has demonstrated superior performance over existing state-of-the-art models in trajectory and intention prediction. The results from our experiments and ablation studies robustly validate PTINet's effectiveness in jointly exploring intention and trajectory prediction for pedestrian behaviour modelling. The experimental evaluation indicates the advantage of using global and local contextual features for pedestrian trajectory and intention prediction. The effectiveness of PTINet in predicting pedestrian behavior paves the way for the development of automated systems capable of seamlessly interacting with pedestrians in urban settings.
Read more7/25/2024

0
Pedestrian Motion Prediction Using Transformer-based Behavior Clustering and Data-Driven Reachability Analysis
Kleio Fragkedaki, Frank J. Jiang, Karl H. Johansson, Jonas M{aa}rtensson
In this work, we present a transformer-based framework for predicting future pedestrian states based on clustered historical trajectory data. In previous studies, researchers propose enhancing pedestrian trajectory predictions by using manually crafted labels to categorize pedestrian behaviors and intentions. However, these approaches often only capture a limited range of pedestrian behaviors and introduce human bias into the predictions. To alleviate the dependency on manually crafted labels, we utilize a transformer encoder coupled with hierarchical density-based clustering to automatically identify diverse behavior patterns, and use these clusters in data-driven reachability analysis. By using a transformer-based approach, we seek to enhance the representation of pedestrian trajectories and uncover characteristics or features that are subsequently used to group trajectories into different behavior clusters. We show that these behavior clusters can be used with data-driven reachability analysis, yielding an end-to-end data-driven approach to predicting the future motion of pedestrians. We train and evaluate our approach on a real pedestrian dataset, showcasing its effectiveness in forecasting pedestrian movements.
Read more8/29/2024
🔮
0
Evaluating Pedestrian Trajectory Prediction Methods with Respect to Autonomous Driving
Nico Uhlemann, Felix Fent, Markus Lienkamp
In this paper, we assess the state of the art in pedestrian trajectory prediction within the context of generating single trajectories, a critical aspect aligning with the requirements in autonomous systems. The evaluation is conducted on the widely-used ETH/UCY dataset where the Average Displacement Error (ADE) and the Final Displacement Error (FDE) are reported. Alongside this, we perform an ablation study to investigate the impact of the observed motion history on prediction performance. To evaluate the scalability of each approach when confronted with varying amounts of agents, the inference time of each model is measured. Following a quantitative analysis, the resulting predictions are compared in a qualitative manner, giving insight into the strengths and weaknesses of current approaches. The results demonstrate that although a constant velocity model (CVM) provides a good approximation of the overall dynamics in the majority of cases, additional features need to be incorporated to reflect common pedestrian behavior observed. Therefore, this study presents a data-driven analysis with the intent to guide the future development of pedestrian trajectory prediction algorithms.
Read more4/8/2024