Progressive Pretext Task Learning for Human Trajectory Prediction

0

Sign in to get full access
Overview
- This paper presents a novel approach called Progressive Pretext Task Learning (PPTL) for predicting the future trajectories of humans in dynamic environments.
- The key idea is to gradually increase the difficulty of auxiliary pretext tasks during training to help the model better learn the underlying dynamics and patterns of human movement.
- The authors demonstrate the effectiveness of PPTL on several popular human trajectory prediction benchmarks, showing improved performance compared to state-of-the-art methods.
Plain English Explanation
Predicting where people will move in the future is an important task with applications in areas like autonomous driving, robotics, and video surveillance. However, it's a challenging problem because human movement is complex and influenced by many factors.
The authors of this paper propose a new training approach called Progressive Pretext Task Learning (PPTL) to address this challenge. The core idea is to start the model off with relatively simple "pretext" tasks during training, like predicting the next few steps of a person's trajectory. Over time, the pretext tasks become more difficult, forcing the model to learn increasingly nuanced representations of human movement patterns.
By progressively increasing the task difficulty, the model is able to build up powerful skills for anticipating future human trajectories. The authors show that this PPTL approach outperforms other state-of-the-art methods on several standard benchmarks for human trajectory prediction.
The key advantage of PPTL is that it helps the model learn the underlying dynamics and structure of human motion, rather than just memorizing patterns in the training data. This makes the model more generalizable to new scenarios. The authors' experiments demonstrate the effectiveness of this progressive learning approach for producing accurate and robust predictions of future human trajectories.
Technical Explanation
The authors propose a novel training paradigm called Progressive Pretext Task Learning (PPTL) to address the challenge of human trajectory prediction. The core idea is to gradually increase the difficulty of auxiliary "pretext" tasks that the model must learn during training.
The pretext tasks start simple, like predicting the next few steps of a person's trajectory. Over the course of training, the pretext tasks become more complex, eventually requiring the model to anticipate longer-term future states and handle more nuanced motion patterns.
This progressive increase in task difficulty forces the model to continuously expand its representational capacity and learn more sophisticated models of human movement. By the end of training, the model has developed powerful skills for anticipating future trajectories in complex, dynamic environments.
The authors demonstrate the effectiveness of PPTL on several popular human trajectory prediction benchmarks, including datasets from prior work. They show that PPTL outperforms other state-of-the-art approaches, such as attention-based social graph models and methods that learn discrete representations of human behaviors.
The key innovation of PPTL is its ability to guide the model towards learning generalizable representations of human motion, rather than just memorizing patterns in the training data. This is achieved by the progressive increase in pretext task difficulty, which forces the model to continuously expand its understanding of the underlying dynamics.
Critical Analysis
The authors provide a thorough evaluation of their PPTL approach, demonstrating its effectiveness on a range of trajectory prediction benchmarks. However, the paper does not discuss certain limitations or caveats that may be worth considering.
For example, the authors do not explore how the PPTL approach might perform in more challenging, real-world scenarios with occlusions, sensor noise, or more complex interactions between individuals. It's possible that the progressive pretext tasks may not fully capture the richness of these real-world environments.
Additionally, the paper does not delve into the computational and memory requirements of the PPTL approach, which could be an important practical consideration for deployment in resource-constrained settings.
Further research could also investigate the effects of different pretext task designs and schedules on the model's learning and generalization capabilities. Exploring the interpretability of the learned representations could also yield valuable insights.
Overall, the PPTL approach represents an exciting and well-executed contribution to the field of human trajectory prediction. However, as with any research, there are opportunities for continued exploration and refinement to address potential limitations and expand the applicability of the method.
Conclusion
This paper presents a novel training approach called Progressive Pretext Task Learning (PPTL) for predicting the future trajectories of humans in dynamic environments. The key idea is to gradually increase the difficulty of auxiliary pretext tasks during training, forcing the model to continuously expand its understanding of the underlying patterns and dynamics of human movement.
The authors demonstrate the effectiveness of PPTL on several popular human trajectory prediction benchmarks, showing improved performance compared to state-of-the-art methods. The PPTL approach helps the model learn generalizable representations of human motion, rather than just memorizing patterns in the training data.
This research represents an important contribution to the field of human trajectory prediction, with potential applications in areas like autonomous driving, robotics, and video surveillance. While the paper provides a thorough evaluation, there are opportunities for further exploration of the method's limitations and potential extensions.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Progressive Pretext Task Learning for Human Trajectory Prediction
Xiaotong Lin, Tianming Liang, Jianhuang Lai, Jian-Fang Hu
Human trajectory prediction is a practical task of predicting the future positions of pedestrians on the road, which typically covers all temporal ranges from short-term to long-term within a trajectory. However, existing works attempt to address the entire trajectory prediction with a singular, uniform training paradigm, neglecting the distinction between short-term and long-term dynamics in human trajectories. To overcome this limitation, we introduce a novel Progressive Pretext Task learning (PPT) framework, which progressively enhances the model's capacity of capturing short-term dynamics and long-term dependencies for the final entire trajectory prediction. Specifically, we elaborately design three stages of training tasks in the PPT framework. In the first stage, the model learns to comprehend the short-term dynamics through a stepwise next-position prediction task. In the second stage, the model is further enhanced to understand long-term dependencies through a destination prediction task. In the final stage, the model aims to address the entire future trajectory task by taking full advantage of the knowledge from previous stages. To alleviate the knowledge forgetting, we further apply a cross-task knowledge distillation. Additionally, we design a Transformer-based trajectory predictor, which is able to achieve highly efficient two-step reasoning by integrating a destination-driven prediction strategy and a group of learnable prompt embeddings. Extensive experiments on popular benchmarks have demonstrated that our proposed approach achieves state-of-the-art performance with high efficiency. Code is available at https://github.com/iSEE-Laboratory/PPT.
Read more7/17/2024
0
Context-aware Multi-task Learning for Pedestrian Intent and Trajectory Prediction
Farzeen Munir, Tomasz Piotr Kucner
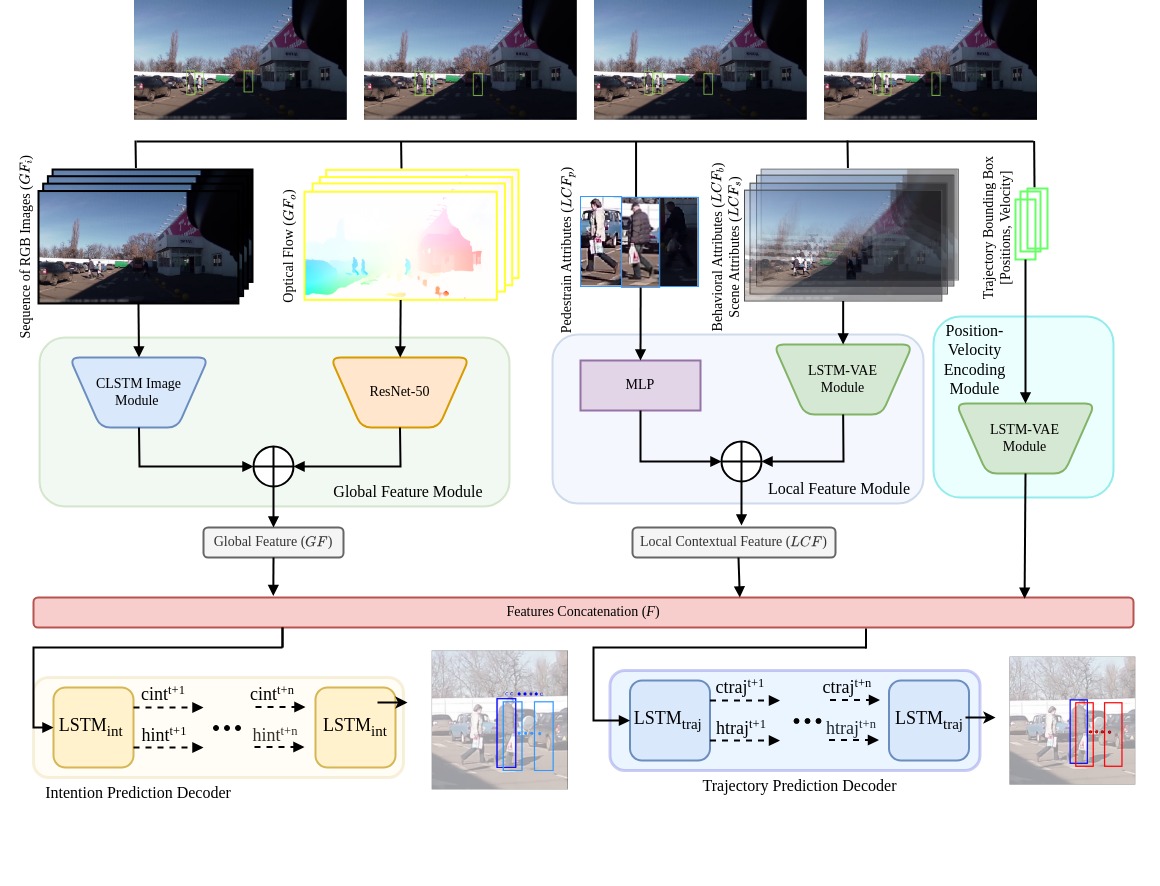
The advancement of socially-aware autonomous vehicles hinges on precise modeling of human behavior. Within this broad paradigm, the specific challenge lies in accurately predicting pedestrian's trajectory and intention. Traditional methodologies have leaned heavily on historical trajectory data, frequently overlooking vital contextual cues such as pedestrian-specific traits and environmental factors. Furthermore, there's a notable knowledge gap as trajectory and intention prediction have largely been approached as separate problems, despite their mutual dependence. To bridge this gap, we introduce PTINet (Pedestrian Trajectory and Intention Prediction Network), which jointly learns the trajectory and intention prediction by combining past trajectory observations, local contextual features (individual pedestrian behaviors), and global features (signs, markings etc.). The efficacy of our approach is evaluated on widely used public datasets: JAAD and PIE, where it has demonstrated superior performance over existing state-of-the-art models in trajectory and intention prediction. The results from our experiments and ablation studies robustly validate PTINet's effectiveness in jointly exploring intention and trajectory prediction for pedestrian behaviour modelling. The experimental evaluation indicates the advantage of using global and local contextual features for pedestrian trajectory and intention prediction. The effectiveness of PTINet in predicting pedestrian behavior paves the way for the development of automated systems capable of seamlessly interacting with pedestrians in urban settings.
Read more7/25/2024

0
Adaptive Human Trajectory Prediction via Latent Corridors
Neerja Thakkar, Karttikeya Mangalam, Andrea Bajcsy, Jitendra Malik
Human trajectory prediction is typically posed as a zero-shot generalization problem: a predictor is learnt on a dataset of human motion in training scenes, and then deployed on unseen test scenes. While this paradigm has yielded tremendous progress, it fundamentally assumes that trends in human behavior within the deployment scene are constant over time. As such, current prediction models are unable to adapt to scene-specific transient human behaviors, such as crowds temporarily gathering to see buskers, pedestrians hurrying through the rain and avoiding puddles, or a protest breaking out. We formalize the problem of scene-specific adaptive trajectory prediction and propose a new adaptation approach inspired by prompt tuning called latent corridors. By augmenting the input of any pre-trained human trajectory predictor with learnable image prompts, the predictor can improve in the deployment scene by inferring trends from extremely small amounts of new data (e.g., 2 humans observed for 30 seconds). With less than 0.1% additional model parameters, we see up to 23.9% ADE improvement in MOTSynth simulated data and 16.4% ADE in MOT and Wildtrack real pedestrian data. Qualitatively, we observe that latent corridors imbue predictors with an awareness of scene geometry and scene-specific human behaviors that non-adaptive predictors struggle to capture. The project website can be found at https://neerja.me/atp_latent_corridors/.
Read more7/15/2024

0
TrACT: A Training Dynamics Aware Contrastive Learning Framework for Long-tail Trajectory Prediction
Junrui Zhang, Mozhgan Pourkeshavarz, Amir Rasouli
As a safety critical task, autonomous driving requires accurate predictions of road users' future trajectories for safe motion planning, particularly under challenging conditions. Yet, many recent deep learning methods suffer from a degraded performance on the challenging scenarios, mainly because these scenarios appear less frequently in the training data. To address such a long-tail issue, existing methods force challenging scenarios closer together in the feature space during training to trigger information sharing among them for more robust learning. These methods, however, primarily rely on the motion patterns to characterize scenarios, omitting more informative contextual information, such as interactions and scene layout. We argue that exploiting such information not only improves prediction accuracy but also scene compliance of the generated trajectories. In this paper, we propose to incorporate richer training dynamics information into a prototypical contrastive learning framework. More specifically, we propose a two-stage process. First, we generate rich contextual features using a baseline encoder-decoder framework. These features are split into clusters based on the model's output errors, using the training dynamics information, and a prototype is computed within each cluster. Second, we retrain the model using the prototypes in a contrastive learning framework. We conduct empirical evaluations of our approach using two large-scale naturalistic datasets and show that our method achieves state-of-the-art performance by improving accuracy and scene compliance on the long-tail samples. Furthermore, we perform experiments on a subset of the clusters to highlight the additional benefit of our approach in reducing training bias.
Read more5/1/2024