A Multi-Stage Goal-Driven Network for Pedestrian Trajectory Prediction

0

Sign in to get full access
Overview
- This research paper presents a multi-stage, goal-driven network for predicting the future trajectories of pedestrians.
- The proposed approach combines an attention mechanism with a goal-driven architecture to improve the accuracy of pedestrian trajectory prediction.
- The authors tested their model on several benchmark datasets and compared its performance to state-of-the-art methods.
Plain English Explanation
The researchers have developed a new way to predict where pedestrians will walk in the future. Predicting pedestrian movements is important for applications like self-driving cars, to help them anticipate and react to pedestrian behavior.
The key idea behind this research is to use an "attention mechanism" to focus the model on the most relevant information when making predictions. Rather than considering all the information about a pedestrian's past movements equally, the attention mechanism allows the model to prioritize the most important details.
Additionally, the model is "goal-driven," meaning it tries to predict where the pedestrian is ultimately trying to go, rather than just forecasting their immediate next steps. By considering the pedestrian's higher-level goals, the model can make more accurate long-term trajectory predictions.
The researchers tested their model on several standard datasets used in pedestrian trajectory prediction research. They found that their approach outperformed other state-of-the-art methods, demonstrating the value of the attention mechanism and goal-driven architecture.
Technical Explanation
The proposed model, termed a "Multi-Stage Goal-Driven Network" (MSGDN), consists of several key components:
- Encoder: This module processes the observed history of a pedestrian's movements, using an attention mechanism to focus on the most relevant information.
- Goal Predictor: This component predicts the pedestrian's likely destination or "goal" based on their past trajectory.
- Decoder: This module uses the encoded history and predicted goal to generate a forecast of the pedestrian's future trajectory.
The authors evaluated their MSGDN model on several benchmark datasets for pedestrian trajectory prediction, including ETH, UCY, and Stanford Drone. They compared its performance to other state-of-the-art methods, such as Uncertainty-Aware Pedestrian Trajectory Prediction and Multi-Step Traffic Prediction.
The results showed that the MSGDN model outperformed the competing approaches, particularly in terms of long-term prediction accuracy. The authors attribute this to the effectiveness of the attention mechanism and goal-driven architecture, which allow the model to focus on the most relevant information and anticipate the pedestrian's intended destination.
Critical Analysis
The paper provides a comprehensive evaluation of the MSGDN model, including detailed comparisons to other state-of-the-art methods. However, the authors acknowledge several limitations and areas for future research:
- The model assumes that each pedestrian has a single, well-defined goal, which may not always be the case in real-world scenarios. Extending the model to handle multiple or changing goals could be an important area for future work.
- The experiments were conducted on relatively small-scale datasets, and the model's performance on large-scale, real-world data remains to be seen. Evaluating the model's scalability and robustness would be an important next step.
- The authors do not provide a detailed analysis of the model's computational complexity or inference speed, which could be crucial for real-time applications like autonomous driving.
Overall, the MSGDN model represents a promising approach to pedestrian trajectory prediction, but further research is needed to address the identified limitations and explore the model's broader applicability.
Conclusion
This research paper presents a novel, multi-stage, goal-driven network for predicting the future trajectories of pedestrians. By incorporating an attention mechanism and a goal-driven architecture, the proposed model demonstrates superior performance compared to other state-of-the-art methods on several benchmark datasets.
The key insights from this work are the value of focusing on the most relevant information when making predictions (via the attention mechanism) and the importance of considering the pedestrian's intended destination (via the goal-driven approach). These techniques can potentially be applied to a wide range of trajectory prediction tasks, with implications for applications like autonomous driving, urban planning, and crowd management.
While the paper provides a strong foundation, further research is needed to address the identified limitations and explore the model's scalability and robustness in real-world settings. By continuing to advance the state of the art in pedestrian trajectory prediction, researchers can contribute to the development of safer and more intelligent transportation systems that can better anticipate and accommodate human behavior.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A Multi-Stage Goal-Driven Network for Pedestrian Trajectory Prediction
Xiuen Wu, Tao Wang, Yuanzheng Cai, Lingyu Liang, George Papageorgiou
Pedestrian trajectory prediction plays a pivotal role in ensuring the safety and efficiency of various applications, including autonomous vehicles and traffic management systems. This paper proposes a novel method for pedestrian trajectory prediction, called multi-stage goal-driven network (MGNet). Diverging from prior approaches relying on stepwise recursive prediction and the singular forecasting of a long-term goal, MGNet directs trajectory generation by forecasting intermediate stage goals, thereby reducing prediction errors. The network comprises three main components: a conditional variational autoencoder (CVAE), an attention module, and a multi-stage goal evaluator. Trajectories are encoded using conditional variational autoencoders to acquire knowledge about the approximate distribution of pedestrians' future trajectories, and combined with an attention mechanism to capture the temporal dependency between trajectory sequences. The pivotal module is the multi-stage goal evaluator, which utilizes the encoded feature vectors to predict intermediate goals, effectively minimizing cumulative errors in the recursive inference process. The effectiveness of MGNet is demonstrated through comprehensive experiments on the JAAD and PIE datasets. Comparative evaluations against state-of-the-art algorithms reveal significant performance improvements achieved by our proposed method.
Read more6/27/2024
0
Attention-aware Social Graph Transformer Networks for Stochastic Trajectory Prediction
Yao Liu, Binghao Li, Xianzhi Wang, Claude Sammut, Lina Yao
Trajectory prediction is fundamental to various intelligent technologies, such as autonomous driving and robotics. The motion prediction of pedestrians and vehicles helps emergency braking, reduces collisions, and improves traffic safety. Current trajectory prediction research faces problems of complex social interactions, high dynamics and multi-modality. Especially, it still has limitations in long-time prediction. We propose Attention-aware Social Graph Transformer Networks for multi-modal trajectory prediction. We combine Graph Convolutional Networks and Transformer Networks by generating stable resolution pseudo-images from Spatio-temporal graphs through a designed stacking and interception method. Furthermore, we design the attention-aware module to handle social interaction information in scenarios involving mixed pedestrian-vehicle traffic. Thus, we maintain the advantages of the Graph and Transformer, i.e., the ability to aggregate information over an arbitrary number of neighbors and the ability to perform complex time-dependent data processing. We conduct experiments on datasets involving pedestrian, vehicle, and mixed trajectories, respectively. Our results demonstrate that our model minimizes displacement errors across various metrics and significantly reduces the likelihood of collisions. It is worth noting that our model effectively reduces the final displacement error, illustrating the ability of our model to predict for a long time.
Read more5/14/2024

0
Multi-Agent Trajectory Prediction with Difficulty-Guided Feature Enhancement Network
Guipeng Xin, Duanfeng Chu, Liping Lu, Zejian Deng, Yuang Lu, Xigang Wu
Trajectory prediction is crucial for autonomous driving as it aims to forecast the future movements of traffic participants. Traditional methods usually perform holistic inference on the trajectories of agents, neglecting the differences in prediction difficulty among agents. This paper proposes a novel Difficulty-Guided Feature Enhancement Network (DGFNet), which leverages the prediction difficulty differences among agents for multi-agent trajectory prediction. Firstly, we employ spatio-temporal feature encoding and interaction to capture rich spatio-temporal features. Secondly, a difficulty-guided decoder is used to control the flow of future trajectories into subsequent modules, obtaining reliable future trajectories. Then, feature interaction and fusion are performed through the future feature interaction module. Finally, the fused agent features are fed into the final predictor to generate the predicted trajectory distributions for multiple participants. Experimental results demonstrate that our DGFNet achieves state-of-the-art performance on the Argoverse 1&2 motion forecasting benchmarks. Ablation studies further validate the effectiveness of each module. Moreover, compared with SOTA methods, our method balances trajectory prediction accuracy and real-time inference speed.
Read more7/30/2024
0
Context-aware Multi-task Learning for Pedestrian Intent and Trajectory Prediction
Farzeen Munir, Tomasz Piotr Kucner
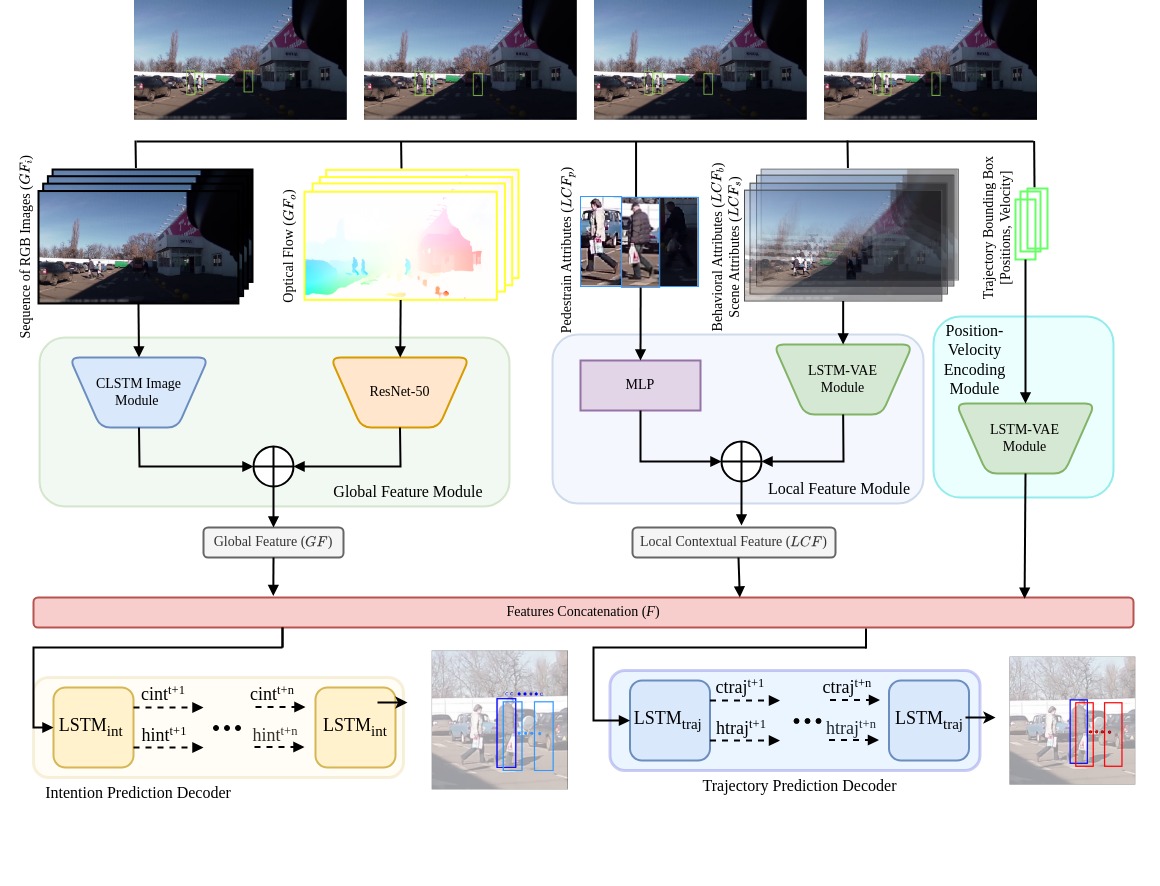
The advancement of socially-aware autonomous vehicles hinges on precise modeling of human behavior. Within this broad paradigm, the specific challenge lies in accurately predicting pedestrian's trajectory and intention. Traditional methodologies have leaned heavily on historical trajectory data, frequently overlooking vital contextual cues such as pedestrian-specific traits and environmental factors. Furthermore, there's a notable knowledge gap as trajectory and intention prediction have largely been approached as separate problems, despite their mutual dependence. To bridge this gap, we introduce PTINet (Pedestrian Trajectory and Intention Prediction Network), which jointly learns the trajectory and intention prediction by combining past trajectory observations, local contextual features (individual pedestrian behaviors), and global features (signs, markings etc.). The efficacy of our approach is evaluated on widely used public datasets: JAAD and PIE, where it has demonstrated superior performance over existing state-of-the-art models in trajectory and intention prediction. The results from our experiments and ablation studies robustly validate PTINet's effectiveness in jointly exploring intention and trajectory prediction for pedestrian behaviour modelling. The experimental evaluation indicates the advantage of using global and local contextual features for pedestrian trajectory and intention prediction. The effectiveness of PTINet in predicting pedestrian behavior paves the way for the development of automated systems capable of seamlessly interacting with pedestrians in urban settings.
Read more7/25/2024