Continuous Control with Coarse-to-fine Reinforcement Learning

0
Sign in to get full access
Overview
• The paper "Continuous Control with Coarse-to-fine Reinforcement Learning" presents a novel reinforcement learning (RL) algorithm for solving continuous control tasks.
• The key idea is to train the agent in a coarse-to-fine manner, starting with a simple task and gradually increasing the complexity as the agent learns.
• This approach aims to improve the sample efficiency and performance of RL agents in continuous control problems, which are challenging due to the high-dimensional and continuous action spaces.
Plain English Explanation
The paper describes a new way of training reinforcement learning agents to solve continuous control tasks, such as controlling a robot arm or navigating a self-driving car. Typically, these tasks involve making decisions in a high-dimensional and continuous space, which can be very difficult for RL agents to learn.
The approach proposed in the paper is to start the agent off with a simpler version of the task, and then gradually increase the complexity as the agent learns. For example, the agent might first learn to control a robot arm in a 2D plane, and then gradually expand to 3D and add more degrees of freedom. This "coarse-to-fine" training process allows the agent to build up its skills in a more structured way, rather than trying to tackle the full complexity of the task all at once.
The key benefit of this approach is that it can improve the sample efficiency and performance of the RL agent, meaning it can learn the task more quickly and effectively compared to traditional RL methods. This could be particularly useful in real-world applications where data and computing resources are limited.
Technical Explanation
The paper introduces a coarse-to-fine RL (CTF-RL) algorithm that gradually increases the complexity of the continuous control task during training. The agent starts with a simplified version of the task and progressively learns to handle more complex scenarios.
The key components of the CTF-RL algorithm are:
-
Task Curriculum: The task complexity is increased in a stepwise manner, with the agent first learning to solve simpler versions of the problem and then gradually tackling more challenging versions.
-
Reward Shaping: The reward function is also adjusted to align with the increasing task complexity, providing the agent with more informative feedback as it progresses.
-
Network Architecture: The RL agent uses a hierarchical network architecture that can efficiently represent the coarse-to-fine control policies.
The authors evaluate the CTF-RL algorithm on several continuous control benchmarks and demonstrate its superior performance and sample efficiency compared to baseline RL methods that do not employ the coarse-to-fine training approach.
Critical Analysis
The paper presents a well-designed and thoroughly evaluated approach to solving continuous control tasks using reinforcement learning. The coarse-to-fine training process is a novel and promising idea that addresses some of the key challenges in this domain.
One potential limitation of the CTF-RL algorithm is that it may require careful task design and reward shaping to ensure the agent learns the right skills at each stage of the curriculum. This could make the approach more challenging to apply in complex, real-world scenarios where the task structure is not well-defined.
Additionally, the paper does not explore the transferability of the learned skills across different continuous control tasks. It would be interesting to see how the CTF-RL agent performs when faced with novel tasks that differ from the ones it was trained on.
Overall, the research presented in this paper represents a significant contribution to the field of continuous control reinforcement learning and provides a useful framework for developing more sample-efficient and high-performing RL agents.
Conclusion
The "Continuous Control with Coarse-to-fine Reinforcement Learning" paper introduces a novel RL algorithm that addresses the challenges of continuous control tasks by training the agent in a gradual, coarse-to-fine manner. This approach has been shown to improve the sample efficiency and performance of RL agents on various benchmark problems, with the potential for real-world applications in areas such as robotics and autonomous systems.
The key takeaway is that by carefully structuring the learning process and gradually increasing the task complexity, RL agents can learn more effectively and efficiently, paving the way for more advanced and capable continuous control systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Continuous Control with Coarse-to-fine Reinforcement Learning
Younggyo Seo, Jafar Uruc{c}, Stephen James
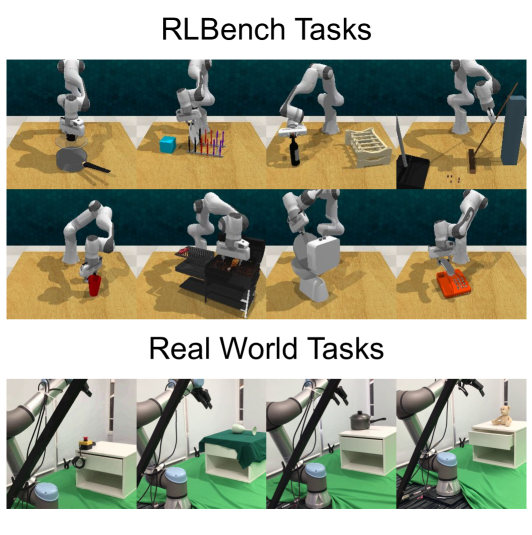
Despite recent advances in improving the sample-efficiency of reinforcement learning (RL) algorithms, designing an RL algorithm that can be practically deployed in real-world environments remains a challenge. In this paper, we present Coarse-to-fine Reinforcement Learning (CRL), a framework that trains RL agents to zoom-into a continuous action space in a coarse-to-fine manner, enabling the use of stable, sample-efficient value-based RL algorithms for fine-grained continuous control tasks. Our key idea is to train agents that output actions by iterating the procedure of (i) discretizing the continuous action space into multiple intervals and (ii) selecting the interval with the highest Q-value to further discretize at the next level. We then introduce a concrete, value-based algorithm within the CRL framework called Coarse-to-fine Q-Network (CQN). Our experiments demonstrate that CQN significantly outperforms RL and behavior cloning baselines on 20 sparsely-rewarded RLBench manipulation tasks with a modest number of environment interactions and expert demonstrations. We also show that CQN robustly learns to solve real-world manipulation tasks within a few minutes of online training.
Read more7/11/2024

0
Growing Q-Networks: Solving Continuous Control Tasks with Adaptive Control Resolution
Tim Seyde, Peter Werner, Wilko Schwarting, Markus Wulfmeier, Daniela Rus
Recent reinforcement learning approaches have shown surprisingly strong capabilities of bang-bang policies for solving continuous control benchmarks. The underlying coarse action space discretizations often yield favourable exploration characteristics while final performance does not visibly suffer in the absence of action penalization in line with optimal control theory. In robotics applications, smooth control signals are commonly preferred to reduce system wear and energy efficiency, but action costs can be detrimental to exploration during early training. In this work, we aim to bridge this performance gap by growing discrete action spaces from coarse to fine control resolution, taking advantage of recent results in decoupled Q-learning to scale our approach to high-dimensional action spaces up to dim(A) = 38. Our work indicates that an adaptive control resolution in combination with value decomposition yields simple critic-only algorithms that yield surprisingly strong performance on continuous control tasks.
Read more4/8/2024
0
Continuous Control Reinforcement Learning: Distributed Distributional DrQ Algorithms
Zehao Zhou
Distributed Distributional DrQ is a model-free and off-policy RL algorithm for continuous control tasks based on the state and observation of the agent, which is an actor-critic method with the data-augmentation and the distributional perspective of critic value function. Aim to learn to control the agent and master some tasks in a high-dimensional continuous space. DrQ-v2 uses DDPG as the backbone and achieves out-performance in various continuous control tasks. Here Distributed Distributional DrQ uses Distributed Distributional DDPG as the backbone, and this modification aims to achieve better performance in some hard continuous control tasks through the better expression ability of distributional value function and distributed actor policies.
Read more4/17/2024
🏅
0
Fine-Grained Causal Dynamics Learning with Quantization for Improving Robustness in Reinforcement Learning
Inwoo Hwang, Yunhyeok Kwak, Suhyung Choi, Byoung-Tak Zhang, Sanghack Lee
Causal dynamics learning has recently emerged as a promising approach to enhancing robustness in reinforcement learning (RL). Typically, the goal is to build a dynamics model that makes predictions based on the causal relationships among the entities. Despite the fact that causal connections often manifest only under certain contexts, existing approaches overlook such fine-grained relationships and lack a detailed understanding of the dynamics. In this work, we propose a novel dynamics model that infers fine-grained causal structures and employs them for prediction, leading to improved robustness in RL. The key idea is to jointly learn the dynamics model with a discrete latent variable that quantizes the state-action space into subgroups. This leads to recognizing meaningful context that displays sparse dependencies, where causal structures are learned for each subgroup throughout the training. Experimental results demonstrate the robustness of our method to unseen states and locally spurious correlations in downstream tasks where fine-grained causal reasoning is crucial. We further illustrate the effectiveness of our subgroup-based approach with quantization in discovering fine-grained causal relationships compared to prior methods.
Read more6/6/2024