Continuously Learning, Adapting, and Improving: A Dual-Process Approach to Autonomous Driving
2405.15324
0
0
Abstract
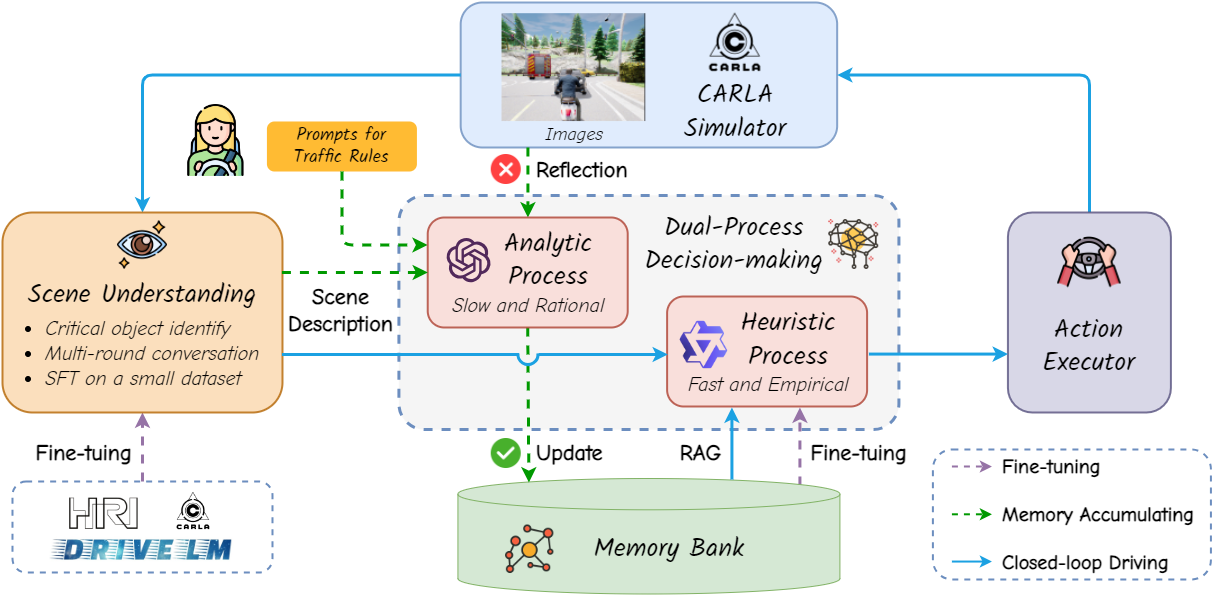
Autonomous driving has advanced significantly due to sensors, machine learning, and artificial intelligence improvements. However, prevailing methods struggle with intricate scenarios and causal relationships, hindering adaptability and interpretability in varied environments. To address the above problems, we introduce LeapAD, a novel paradigm for autonomous driving inspired by the human cognitive process. Specifically, LeapAD emulates human attention by selecting critical objects relevant to driving decisions, simplifying environmental interpretation, and mitigating decision-making complexities. Additionally, LeapAD incorporates an innovative dual-process decision-making module, which consists of an Analytic Process (System-II) for thorough analysis and reasoning, along with a Heuristic Process (System-I) for swift and empirical processing. The Analytic Process leverages its logical reasoning to accumulate linguistic driving experience, which is then transferred to the Heuristic Process by supervised fine-tuning. Through reflection mechanisms and a growing memory bank, LeapAD continuously improves itself from past mistakes in a closed-loop environment. Closed-loop testing in CARLA shows that LeapAD outperforms all methods relying solely on camera input, requiring 1-2 orders of magnitude less labeled data. Experiments also demonstrate that as the memory bank expands, the Heuristic Process with only 1.8B parameters can inherit the knowledge from a GPT-4 powered Analytic Process and achieve continuous performance improvement. Code will be released at https://github.com/PJLab-ADG/LeapAD.
Create account to get full access
Overview
- This paper presents a dual-process approach to autonomous driving that enables continuously learning, adapting, and improving the system.
- The proposed method combines a fast, reactive decision-making process with a slower, deliberative learning process to handle the complex and dynamic nature of driving environments.
- The authors demonstrate the effectiveness of their approach through simulation experiments and discuss its potential to improve the safety and reliability of autonomous vehicles.
Plain English Explanation
The paper describes a new way to design autonomous driving systems that can continuously learn, adapt, and improve over time. The key idea is to use a "dual-process" approach, which means the system has two different ways of making decisions and learning.
The first process is fast and reactive. It quickly analyzes the current driving situation and makes immediate decisions about how to control the vehicle, similar to how a human driver would react in the moment. This allows the system to respond quickly to changing conditions on the road.
The second process is slower and more deliberative. It takes time to analyze the driving data, learn from past experiences, and plan long-term improvements to the system. This learning process happens in the background, continuously refining the system's decision-making capabilities over time.
By combining these two processes, the autonomous driving system can handle the complex and dynamic nature of real-world driving environments. The fast, reactive process allows it to navigate safely in the moment, while the slower, learning process ensures it is continuously getting better and adapting to new situations.
Through simulation experiments, the authors demonstrate that this dual-process approach can improve the safety and reliability of autonomous vehicles compared to traditional systems. This is an important step forward in making self-driving cars a practical and trustworthy technology for the future.
Technical Explanation
The authors propose a dual-process approach to autonomous driving that combines a fast, reactive decision-making process with a slower, deliberative learning process. The fast process quickly analyzes the current driving situation and makes immediate control decisions, while the slow process takes time to learn from past experiences and plan long-term improvements to the system.
This approach is motivated by the complex and dynamic nature of real-world driving environments, which require both rapid responses to changing conditions as well as continuous learning and adaptation. The authors' dual-process architecture includes a low-level control module that handles the fast, reactive decisions, and a high-level planning and learning module that handles the slower, deliberative processes.
Through simulation experiments, the authors demonstrate that this dual-process approach can improve the safety and reliability of autonomous vehicles compared to traditional end-to-end systems. They also discuss how their approach could be extended to incorporate large language models, as explored in the AgentsCoDriver work, to further enhance the system's learning and adaptation capabilities.
The proposed GenAD framework and the DACAPO approach for accelerating continuous learning in autonomous systems are also relevant to the research presented in this paper.
Critical Analysis
The dual-process approach presented in this paper is a promising direction for improving the safety and reliability of autonomous driving systems. By separating the fast, reactive decision-making from the slower, deliberative learning processes, the authors have developed a more robust and adaptable architecture.
However, the paper does not provide a comprehensive evaluation of the approach's performance across a wide range of driving scenarios and environmental conditions. The simulation experiments, while informative, may not fully capture the complexity of real-world driving situations.
Additionally, the paper does not address potential challenges in seamlessly integrating the two decision-making processes, such as ensuring consistent and coherent behavior, or handling conflicts between the fast and slow processes.
Further research is needed to explore the scalability of the dual-process approach, its ability to handle edge cases and rare events, and its potential for deployment in real-world autonomous vehicles. Incorporating techniques from related works, such as the GenAD framework and the DACAPO approach, may also help address some of these challenges.
Conclusion
The dual-process approach to autonomous driving proposed in this paper represents a significant step forward in developing continuously learning, adapting, and improving self-driving systems. By combining fast, reactive decision-making with slower, deliberative learning, the authors have created a more robust and flexible architecture that can handle the complexities of real-world driving environments.
The simulation results are promising, and the potential for further enhancements, such as incorporating large language models as explored in the AgentsCoDriver work, suggests that this dual-process approach could play a crucial role in advancing the safety and reliability of autonomous vehicles.
As the field of autonomous driving continues to evolve, this research highlights the importance of balancing fast, reactive decision-making with slower, deliberative learning processes to create truly adaptive and autonomous systems that can learn and improve over time.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
GAD-Generative Learning for HD Map-Free Autonomous Driving
Weijian Sun, Yanbo Jia, Qi Zeng, Zihao Liu, Jiang Liao, Yue Li, Xianfeng Li
0
0
Deep-learning-based techniques have been widely adopted for autonomous driving software stacks for mass production in recent years, focusing primarily on perception modules, with some work extending this method to prediction modules. However, the downstream planning and control modules are still designed with hefty handcrafted rules, dominated by optimization-based methods such as quadratic programming or model predictive control. This results in a performance bottleneck for autonomous driving systems in that corner cases simply cannot be solved by enumerating hand-crafted rules. We present a deep-learning-based approach that brings prediction, decision, and planning modules together with the attempt to overcome the rule-based methods' deficiency in real-world applications of autonomous driving, especially for urban scenes. The DNN model we proposed is solely trained with 10 hours of human driver data, and it supports all mass-production ADAS features available on the market to date. This method is deployed onto a Jiyue test car with no modification to its factory-ready sensor set and compute platform. the feasibility, usability, and commercial potential are demonstrated in this article.
6/3/2024

AD-H: Autonomous Driving with Hierarchical Agents
Zaibin Zhang, Shiyu Tang, Yuanhang Zhang, Talas Fu, Yifan Wang, Yang Liu, Dong Wang, Jing Shao, Lijun Wang, Huchuan Lu
0
0
Due to the impressive capabilities of multimodal large language models (MLLMs), recent works have focused on employing MLLM-based agents for autonomous driving in large-scale and dynamic environments. However, prevalent approaches often directly translate high-level instructions into low-level vehicle control signals, which deviates from the inherent language generation paradigm of MLLMs and fails to fully harness their emergent powers. As a result, the generalizability of these methods is highly restricted by autonomous driving datasets used during fine-tuning. To tackle this challenge, we propose to connect high-level instructions and low-level control signals with mid-level language-driven commands, which are more fine-grained than high-level instructions but more universal and explainable than control signals, and thus can effectively bridge the gap in between. We implement this idea through a hierarchical multi-agent driving system named AD-H, including a MLLM planner for high-level reasoning and a lightweight controller for low-level execution. The hierarchical design liberates the MLLM from low-level control signal decoding and therefore fully releases their emergent capability in high-level perception, reasoning, and planning. We build a new dataset with action hierarchy annotations. Comprehensive closed-loop evaluations demonstrate several key advantages of our proposed AD-H system. First, AD-H can notably outperform state-of-the-art methods in achieving exceptional driving performance, even exhibiting self-correction capabilities during vehicle operation, a scenario not encountered in the training dataset. Second, AD-H demonstrates superior generalization under long-horizon instructions and novel environmental conditions, significantly surpassing current state-of-the-art methods. We will make our data and code publicly accessible at https://github.com/zhangzaibin/AD-H
6/6/2024

End-to-end Autonomous Driving: Challenges and Frontiers
Li Chen, Penghao Wu, Kashyap Chitta, Bernhard Jaeger, Andreas Geiger, Hongyang Li
0
0
The autonomous driving community has witnessed a rapid growth in approaches that embrace an end-to-end algorithm framework, utilizing raw sensor input to generate vehicle motion plans, instead of concentrating on individual tasks such as detection and motion prediction. End-to-end systems, in comparison to modular pipelines, benefit from joint feature optimization for perception and planning. This field has flourished due to the availability of large-scale datasets, closed-loop evaluation, and the increasing need for autonomous driving algorithms to perform effectively in challenging scenarios. In this survey, we provide a comprehensive analysis of more than 270 papers, covering the motivation, roadmap, methodology, challenges, and future trends in end-to-end autonomous driving. We delve into several critical challenges, including multi-modality, interpretability, causal confusion, robustness, and world models, amongst others. Additionally, we discuss current advancements in foundation models and visual pre-training, as well as how to incorporate these techniques within the end-to-end driving framework. we maintain an active repository that contains up-to-date literature and open-source projects at https://github.com/OpenDriveLab/End-to-end-Autonomous-Driving.
4/23/2024
AgentsCoDriver: Large Language Model Empowered Collaborative Driving with Lifelong Learning
Senkang Hu, Zhengru Fang, Zihan Fang, Yiqin Deng, Xianhao Chen, Yuguang Fang
0
0
Connected and autonomous driving is developing rapidly in recent years. However, current autonomous driving systems, which are primarily based on data-driven approaches, exhibit deficiencies in interpretability, generalization, and continuing learning capabilities. In addition, the single-vehicle autonomous driving systems lack of the ability of collaboration and negotiation with other vehicles, which is crucial for the safety and efficiency of autonomous driving systems. In order to address these issues, we leverage large language models (LLMs) to develop a novel framework, AgentsCoDriver, to enable multiple vehicles to conduct collaborative driving. AgentsCoDriver consists of five modules: observation module, reasoning engine, cognitive memory module, reinforcement reflection module, and communication module. It can accumulate knowledge, lessons, and experiences over time by continuously interacting with the environment, thereby making itself capable of lifelong learning. In addition, by leveraging the communication module, different agents can exchange information and realize negotiation and collaboration in complex traffic environments. Extensive experiments are conducted and show the superiority of AgentsCoDriver.
4/23/2024