DaCapo: Accelerating Continuous Learning in Autonomous Systems for Video Analytics

0

Sign in to get full access
Overview
- This paper introduces DaCapo, a framework for accelerating continuous learning in autonomous systems for video analytics.
- DaCapo aims to enable autonomous systems to quickly adapt to changes in their environment and update their models without forgetting previous knowledge.
- The paper explores how DaCapo can be used to improve the performance of video analytics tasks like object detection and tracking in dynamic environments.
Plain English Explanation
The researchers have developed a new system called DaCapo that helps autonomous systems, like self-driving cars or security cameras, continuously learn and improve over time. Autonomous systems often struggle to adapt when their environment changes, like new objects appearing or lighting conditions shifting. DaCapo is designed to let these systems quickly update their machine learning models to handle these changes, without forgetting what they've learned before.
For example, imagine a self-driving car's object detection model was trained on normal driving conditions, but then needed to operate in a construction zone with new obstacles. DaCapo: Accelerating Continuous Learning in Autonomous Systems for Video Analytics could allow the car to rapidly adapt its model to recognize the new construction equipment, while still maintaining its ability to detect regular cars and pedestrians. This type of continuous learning is key for making autonomous systems more robust and reliable in the real world.
Technical Explanation
The core idea behind DaCapo is to leverage transfer learning and meta-learning techniques to enable fast adaptation of machine learning models used in autonomous systems for video analytics. The framework consists of two main components:
-
Task-Agnostic Model: This is a base model that is pre-trained on a diverse set of video analytics tasks, giving it broad knowledge that can be adapted to new tasks. This builds on prior work on learning locally interacting discrete dynamical systems.
-
Adaptation Module: This component uses meta-learning to quickly fine-tune the task-agnostic model for new environments or tasks, without catastrophically forgetting previous knowledge. The adaptation process draws inspiration from research on continual unsupervised domain adaptation.
The authors evaluate DaCapo on several video analytics benchmarks, demonstrating its ability to outperform standard fine-tuning approaches in terms of adaptation speed and final task performance. This connects to work on learning temporal cues by predicting object movement and context-aware multi-model object detection.
Critical Analysis
The authors provide a thorough evaluation of DaCapo, but there are a few areas that could be explored further:
- The paper focuses on adaptation to new environments, but it's unclear how well DaCapo would handle more dramatic distribution shifts, like completely new types of objects or scenes.
- The adaptation module is designed for single-task learning; it's not clear how the framework could scale to handle multiple tasks simultaneously in a continual learning setting.
- While the results demonstrate the benefits of DaCapo, the paper doesn't provide much insight into the internal workings of the system or why the proposed approach is effective.
Overall, DaCapo represents an interesting step towards building more adaptable autonomous systems, but further research may be needed to address some of these limitations.
Conclusion
The DaCapo framework introduced in this paper offers a promising approach for enabling autonomous systems to continuously learn and adapt to changing environments, which is crucial for deploying these systems in the real world. By combining task-agnostic pre-training and meta-learning-based adaptation, DaCapo allows video analytics models to quickly update their knowledge without forgetting what they've learned before.
While there are still some open questions and areas for improvement, DaCapo's strong performance on benchmark tasks suggests it could be a valuable tool for building more robust and adaptable autonomous systems, with applications in areas like self-driving cars, surveillance, and beyond.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
DaCapo: Accelerating Continuous Learning in Autonomous Systems for Video Analytics
Yoonsung Kim, Changhun Oh, Jinwoo Hwang, Wonung Kim, Seongryong Oh, Yubin Lee, Hardik Sharma, Amir Yazdanbakhsh, Jongse Park
Deep neural network (DNN) video analytics is crucial for autonomous systems such as self-driving vehicles, unmanned aerial vehicles (UAVs), and security robots. However, real-world deployment faces challenges due to their limited computational resources and battery power. To tackle these challenges, continuous learning exploits a lightweight student model at deployment (inference), leverages a larger teacher model for labeling sampled data (labeling), and continuously retrains the student model to adapt to changing scenarios (retraining). This paper highlights the limitations in state-of-the-art continuous learning systems: (1) they focus on computations for retraining, while overlooking the compute needs for inference and labeling, (2) they rely on power-hungry GPUs, unsuitable for battery-operated autonomous systems, and (3) they are located on a remote centralized server, intended for multi-tenant scenarios, again unsuitable for autonomous systems due to privacy, network availability, and latency concerns. We propose a hardware-algorithm co-designed solution for continuous learning, DaCapo, that enables autonomous systems to perform concurrent executions of inference, labeling, and training in a performant and energy-efficient manner. DaCapo comprises (1) a spatially-partitionable and precision-flexible accelerator enabling parallel execution of kernels on sub-accelerators at their respective precisions, and (2) a spatiotemporal resource allocation algorithm that strategically navigates the resource-accuracy tradeoff space, facilitating optimal decisions for resource allocation to achieve maximal accuracy. Our evaluation shows that DaCapo achieves 6.5% and 5.5% higher accuracy than a state-of-the-art GPU-based continuous learning systems, Ekya and EOMU, respectively, while consuming 254x less power.
Read more7/17/2024
🤿
0
DaCapo: a modular deep learning framework for scalable 3D image segmentation
William Patton, Jeff L. Rhoades, Marwan Zouinkhi, David G. Ackerman, Caroline Malin-Mayor, Diane Adjavon, Larissa Heinrich, Davis Bennett, Yurii Zubov, CellMap Project Team, Aubrey V. Weigel, Jan Funke
DaCapo is a specialized deep learning library tailored to expedite the training and application of existing machine learning approaches on large, near-isotropic image data. In this correspondence, we introduce DaCapo's unique features optimized for this specific domain, highlighting its modular structure, efficient experiment management tools, and scalable deployment capabilities. We discuss its potential to improve access to large-scale, isotropic image segmentation and invite the community to explore and contribute to this open-source initiative.
Read more8/7/2024
0
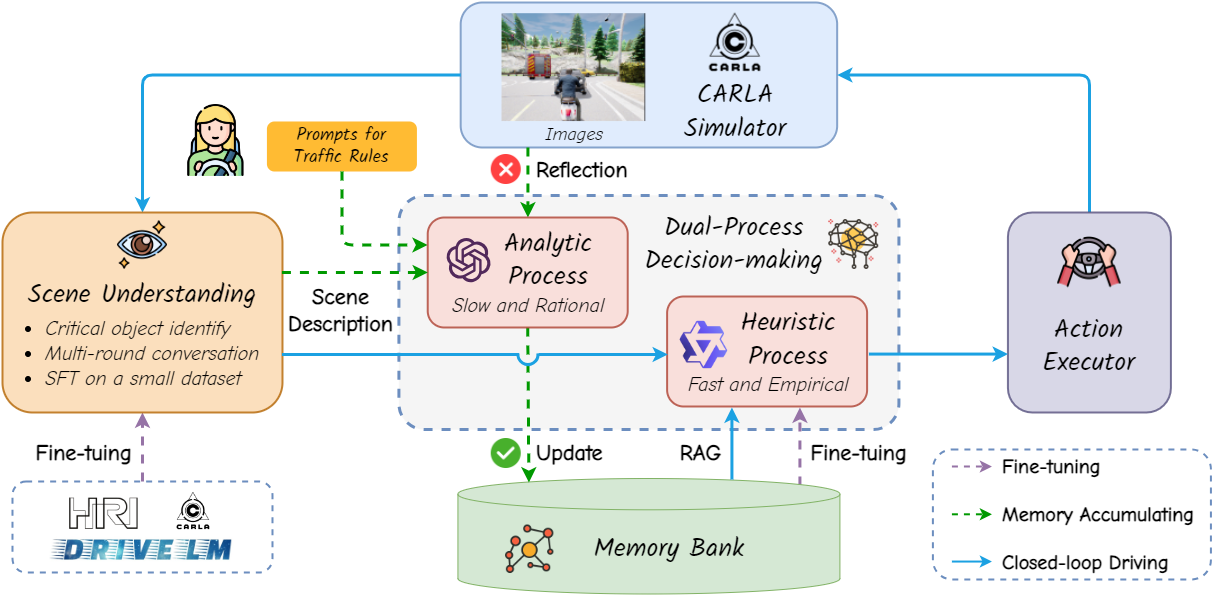
Continuously Learning, Adapting, and Improving: A Dual-Process Approach to Autonomous Driving
Jianbiao Mei, Yukai Ma, Xuemeng Yang, Licheng Wen, Xinyu Cai, Xin Li, Daocheng Fu, Bo Zhang, Pinlong Cai, Min Dou, Botian Shi, Liang He, Yong Liu, Yu Qiao
Autonomous driving has advanced significantly due to sensors, machine learning, and artificial intelligence improvements. However, prevailing methods struggle with intricate scenarios and causal relationships, hindering adaptability and interpretability in varied environments. To address the above problems, we introduce LeapAD, a novel paradigm for autonomous driving inspired by the human cognitive process. Specifically, LeapAD emulates human attention by selecting critical objects relevant to driving decisions, simplifying environmental interpretation, and mitigating decision-making complexities. Additionally, LeapAD incorporates an innovative dual-process decision-making module, which consists of an Analytic Process (System-II) for thorough analysis and reasoning, along with a Heuristic Process (System-I) for swift and empirical processing. The Analytic Process leverages its logical reasoning to accumulate linguistic driving experience, which is then transferred to the Heuristic Process by supervised fine-tuning. Through reflection mechanisms and a growing memory bank, LeapAD continuously improves itself from past mistakes in a closed-loop environment. Closed-loop testing in CARLA shows that LeapAD outperforms all methods relying solely on camera input, requiring 1-2 orders of magnitude less labeled data. Experiments also demonstrate that as the memory bank expands, the Heuristic Process with only 1.8B parameters can inherit the knowledge from a GPT-4 powered Analytic Process and achieve continuous performance improvement. Code will be released at https://github.com/PJLab-ADG/LeapAD.
Read more5/27/2024
0
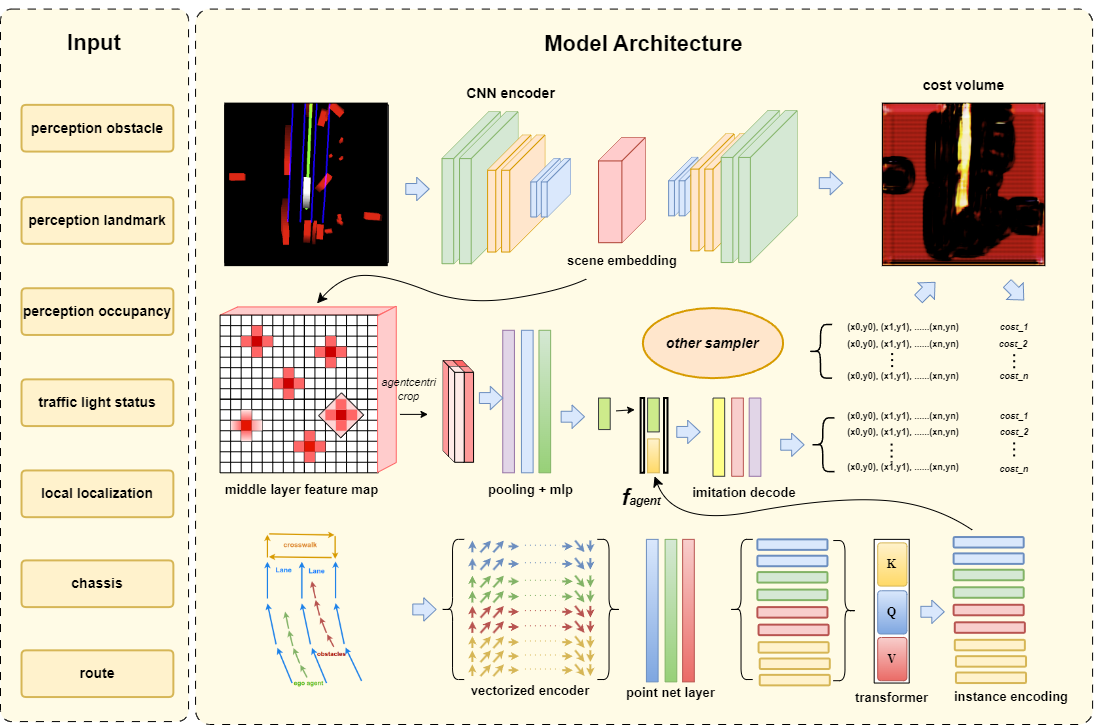
GAD-Generative Learning for HD Map-Free Autonomous Driving
Weijian Sun, Yanbo Jia, Qi Zeng, Zihao Liu, Jiang Liao, Yue Li, Xianfeng Li
Deep-learning-based techniques have been widely adopted for autonomous driving software stacks for mass production in recent years, focusing primarily on perception modules, with some work extending this method to prediction modules. However, the downstream planning and control modules are still designed with hefty handcrafted rules, dominated by optimization-based methods such as quadratic programming or model predictive control. This results in a performance bottleneck for autonomous driving systems in that corner cases simply cannot be solved by enumerating hand-crafted rules. We present a deep-learning-based approach that brings prediction, decision, and planning modules together with the attempt to overcome the rule-based methods' deficiency in real-world applications of autonomous driving, especially for urban scenes. The DNN model we proposed is solely trained with 10 hours of human driver data, and it supports all mass-production ADAS features available on the market to date. This method is deployed onto a Jiyue test car with no modification to its factory-ready sensor set and compute platform. the feasibility, usability, and commercial potential are demonstrated in this article.
Read more6/3/2024