Contrastive Representation for Data Filtering in Cross-Domain Offline Reinforcement Learning

0
📊
Sign in to get full access
Overview
- This paper proposes a novel approach to cross-domain offline reinforcement learning (RL)
- It aims to overcome the data requirement challenge by leveraging source domain data with diverse transition dynamics
- The key idea is to measure the domain gap using a representation-based method, rather than relying on domain classifiers and assumptions about paired domains
Plain English Explanation
The paper tackles the problem of offline reinforcement learning in situations where the target domain (the environment the agent needs to learn about) has limited data available. To address this, the researchers propose using data from a different, "source" domain that has more diverse transition dynamics (how the environment changes in response to the agent's actions).
However, simply combining the data from both domains can lead to performance degradation due to the mismatch in the dynamics between the two domains. Existing methods try to measure this dynamics gap using domain classifiers, but they rely on assumptions about the transferability of the paired domains.
Instead, the paper introduces a new approach that learns a representation of the transition dynamics through a contrastive objective. This allows them to measure the "mutual information gap" between the transition functions of the two domains, without the issues that come with the dynamics gap measurement used in prior work.
Based on this representation, the researchers then develop a data filtering algorithm that selectively shares transitions from the source domain, keeping only those that are most relevant to the target domain according to the contrastive score functions.
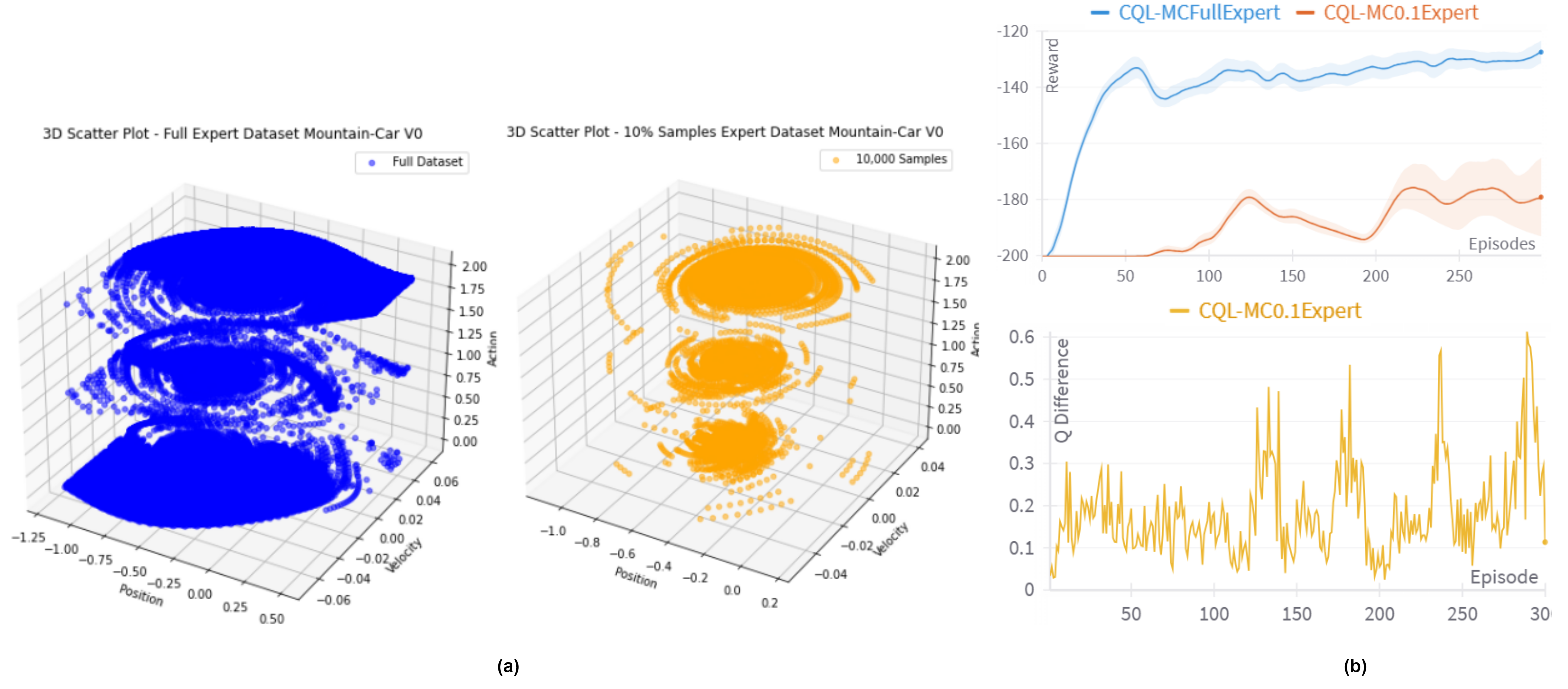
The key benefit of this approach is that it can achieve strong performance on the target domain using only 10% of the target data, compared to state-of-the-art methods that require the full target dataset.
Technical Explanation
The paper introduces a representation-based approach to measure the domain gap in cross-domain offline RL. Rather than relying on domain classifiers and assumptions about the transferability of paired domains, the proposed method learns a representation of the transition dynamics through a contrastive objective.
Specifically, the contrastive objective involves sampling transitions from both the source and target domains and pushing the representations of similar transitions (i.e., those from the same domain) closer together, while pulling apart the representations of dissimilar transitions (i.e., those from different domains). This allows the method to capture the "mutual information gap" between the transition functions of the two domains, without suffering from the unbounded issue of the dynamics gap used in prior work.
Based on the learned representations, the paper then proposes a data filtering algorithm that selectively shares transitions from the source domain. The algorithm assigns a contrastive score to each source transition based on its similarity to the target domain transitions, and only shares those source transitions that have a high contrastive score.
The researchers evaluate their method on various tasks and demonstrate that it can achieve superior performance using only 10% of the target data, compared to state-of-the-art approaches that require the full target dataset to achieve similar results.
Critical Analysis
The paper presents a novel and promising approach to cross-domain offline RL, with several strengths:
- It introduces a representation-based method to measure the domain gap, which avoids the assumptions and limitations of prior techniques based on domain classifiers.
- The contrastive objective used to learn the representations is a clever way to capture the mutual information gap between the transition functions, without the issues associated with the dynamics gap.
- The data filtering algorithm, which selectively shares source domain transitions based on their relevance to the target domain, is an effective way to leverage the source data while mitigating the impact of the domain mismatch.
However, the paper also has a few potential limitations:
- The performance of the method may be sensitive to the choice of hyperparameters, such as the weighting of the contrastive objective or the threshold for the contrastive scores used in the data filtering.
- The method assumes that the source and target domains have some degree of overlap in their transition dynamics, which may not always be the case in practice. It would be interesting to see how the method performs when the domains are more significantly different.
- The paper does not provide much insight into the types of tasks or domains where this approach would be most applicable or beneficial. A more in-depth discussion of the method's strengths and weaknesses across different problem settings would be helpful.
Overall, the paper presents a novel and promising approach to cross-domain offline RL, but further research and evaluation may be needed to fully understand its capabilities and limitations.
Conclusion
This paper introduces a representation-based approach to cross-domain offline reinforcement learning, which aims to overcome the data requirement challenge by leveraging source domain data with diverse transition dynamics. The key innovation is the use of a contrastive objective to learn a representation of the transition dynamics, allowing the method to measure the mutual information gap between the domains without the issues associated with dynamics gap measurement in prior work.
The proposed data filtering algorithm, which selectively shares source domain transitions based on their relevance to the target domain, is shown to be effective in achieving strong performance on the target domain using only a small fraction of the target data. This research represents an important step forward in addressing the data scarcity problem in offline RL, with potential applications in a wide range of real-world scenarios where data availability is limited.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📊
0
Contrastive Representation for Data Filtering in Cross-Domain Offline Reinforcement Learning
Xiaoyu Wen, Chenjia Bai, Kang Xu, Xudong Yu, Yang Zhang, Xuelong Li, Zhen Wang
Cross-domain offline reinforcement learning leverages source domain data with diverse transition dynamics to alleviate the data requirement for the target domain. However, simply merging the data of two domains leads to performance degradation due to the dynamics mismatch. Existing methods address this problem by measuring the dynamics gap via domain classifiers while relying on the assumptions of the transferability of paired domains. In this paper, we propose a novel representation-based approach to measure the domain gap, where the representation is learned through a contrastive objective by sampling transitions from different domains. We show that such an objective recovers the mutual-information gap of transition functions in two domains without suffering from the unbounded issue of the dynamics gap in handling significantly different domains. Based on the representations, we introduce a data filtering algorithm that selectively shares transitions from the source domain according to the contrastive score functions. Empirical results on various tasks demonstrate that our method achieves superior performance, using only 10% of the target data to achieve 89.2% of the performance on 100% target dataset with state-of-the-art methods.
Read more5/13/2024

0
Cross-Domain Policy Adaptation by Capturing Representation Mismatch
Jiafei Lyu, Chenjia Bai, Jingwen Yang, Zongqing Lu, Xiu Li
It is vital to learn effective policies that can be transferred to different domains with dynamics discrepancies in reinforcement learning (RL). In this paper, we consider dynamics adaptation settings where there exists dynamics mismatch between the source domain and the target domain, and one can get access to sufficient source domain data, while can only have limited interactions with the target domain. Existing methods address this problem by learning domain classifiers, performing data filtering from a value discrepancy perspective, etc. Instead, we tackle this challenge from a decoupled representation learning perspective. We perform representation learning only in the target domain and measure the representation deviations on the transitions from the source domain, which we show can be a signal of dynamics mismatch. We also show that representation deviation upper bounds performance difference of a given policy in the source domain and target domain, which motivates us to adopt representation deviation as a reward penalty. The produced representations are not involved in either policy or value function, but only serve as a reward penalizer. We conduct extensive experiments on environments with kinematic and morphology mismatch, and the results show that our method exhibits strong performance on many tasks. Our code is publicly available at https://github.com/dmksjfl/PAR.
Read more5/27/2024

0
Contrastive Adversarial Training for Unsupervised Domain Adaptation
Jiahong Chen, Zhilin Zhang, Lucy Li, Behzad Shahrasbi, Arjun Mishra
Domain adversarial training has shown its effective capability for finding domain invariant feature representations and been successfully adopted for various domain adaptation tasks. However, recent advances of large models (e.g., vision transformers) and emerging of complex adaptation scenarios (e.g., DomainNet) make adversarial training being easily biased towards source domain and hardly adapted to target domain. The reason is twofold: relying on large amount of labelled data from source domain for large model training and lacking of labelled data from target domain for fine-tuning. Existing approaches widely focused on either enhancing discriminator or improving the training stability for the backbone networks. Due to unbalanced competition between the feature extractor and the discriminator during the adversarial training, existing solutions fail to function well on complex datasets. To address this issue, we proposed a novel contrastive adversarial training (CAT) approach that leverages the labeled source domain samples to reinforce and regulate the feature generation for target domain. Typically, the regulation forces the target feature distribution being similar to the source feature distribution. CAT addressed three major challenges in adversarial learning: 1) ensure the feature distributions from two domains as indistinguishable as possible for the discriminator, resulting in a more robust domain-invariant feature generation; 2) encourage target samples moving closer to the source in the feature space, reducing the requirement for generalizing classifier trained on the labeled source domain to unlabeled target domain; 3) avoid directly aligning unpaired source and target samples within mini-batch. CAT can be easily plugged into existing models and exhibits significant performance improvements.
Read more7/18/2024
0
Integrating Domain Knowledge for handling Limited Data in Offline RL
Briti Gangopadhyay, Zhao Wang, Jia-Fong Yeh, Shingo Takamatsu
With the ability to learn from static datasets, Offline Reinforcement Learning (RL) emerges as a compelling avenue for real-world applications. However, state-of-the-art offline RL algorithms perform sub-optimally when confronted with limited data confined to specific regions within the state space. The performance degradation is attributed to the inability of offline RL algorithms to learn appropriate actions for rare or unseen observations. This paper proposes a novel domain knowledge-based regularization technique and adaptively refines the initial domain knowledge to considerably boost performance in limited data with partially omitted states. The key insight is that the regularization term mitigates erroneous actions for sparse samples and unobserved states covered by domain knowledge. Empirical evaluations on standard discrete environment datasets demonstrate a substantial average performance increase of at least 27% compared to existing offline RL algorithms operating on limited data.
Read more6/12/2024