Integrating Domain Knowledge for handling Limited Data in Offline RL

0
Sign in to get full access
Overview
- This paper explores techniques for integrating domain knowledge to improve offline reinforcement learning (RL) performance when faced with limited data.
- Offline RL refers to training RL agents using pre-collected datasets, without the ability to interact with the environment.
- The authors propose several methods for incorporating domain knowledge to address the challenges of limited data in offline RL scenarios.
Plain English Explanation
Reinforcement learning (RL) is a powerful technique for training AI agents to solve complex problems by rewarding desired behaviors. However, RL often requires a lot of trial-and-error interactions with the environment to learn effectively. This can be impractical or even impossible in many real-world scenarios.
Offline RL aims to address this by training agents using pre-collected datasets, without the ability to actively interact with the environment. This is useful in situations where data collection is difficult or expensive, such as robotics or healthcare applications. But offline RL has its own challenges, particularly when the available dataset is limited.
This paper explores ways to integrate domain knowledge - specialized information about the problem at hand - to improve the performance of offline RL systems when data is scarce. The authors propose several techniques, including leveraging domain knowledge and unlabeled data for offline RL, using mildly conservative model-based offline RL, and augmenting offline RL with unlabeled data. These approaches aim to extract more value from limited datasets by incorporating domain-specific insights.
Technical Explanation
The key contributions of this paper are:
-
Leveraging Domain Knowledge: The authors propose techniques for integrating domain knowledge into offline RL to improve performance with limited data. This includes using domain-specific priors to guide the RL agent's exploration and learning.
-
Mildly Conservative Model-based Offline RL: The authors develop a model-based offline RL method that uses a "mildly conservative" approach to model uncertainty. This helps the agent make more reliable decisions when data is scarce.
-
Augmenting Offline RL with Unlabeled Data: The authors show how to leverage unlabeled data, which is often easier to obtain than labeled, expert-demonstrated data, to improve offline RL performance. This builds on prior work like offline RL with imbalanced datasets and hybrid RL from offline observation alone.
Through a series of experiments on benchmark RL tasks, the authors demonstrate the effectiveness of their proposed methods for improving offline RL under limited data conditions. They show significant performance gains compared to standard offline RL approaches.
Critical Analysis
The authors acknowledge several limitations and areas for future work:
- The proposed techniques rely on the availability of relevant domain knowledge, which may not always be easy to obtain or formalize.
- The methods were evaluated on relatively simple benchmark tasks, and their effectiveness on more complex, real-world problems remains to be seen.
- The paper does not provide a comprehensive analysis of the computational and data efficiency trade-offs of the different approaches.
Additionally, one could question whether the reliance on domain knowledge undermines the generality and flexibility that are often cited as key advantages of RL. There may be a risk of over-specialization when incorporating too much domain-specific information.
Overall, the paper presents promising directions for improving offline RL with limited data, but further research is needed to fully understand the practical implications and broader applicability of the techniques.
Conclusion
This paper explores innovative ways to leverage domain knowledge to enhance the performance of offline reinforcement learning systems, particularly when faced with limited data. By incorporating domain-specific insights and leveraging unlabeled data, the authors demonstrate significant improvements over standard offline RL approaches.
These techniques have the potential to expand the practical applicability of RL in real-world scenarios where data collection is challenging, such as robotics, healthcare, and finance. However, the reliance on domain knowledge may also limit the generality of the methods, and further research is needed to fully understand their strengths and limitations.
As the field of RL continues to evolve, integrating domain knowledge in a principled and effective manner remains an important area of exploration. This paper contributes valuable insights and techniques that can help shape the future of offline RL and its ability to thrive in data-constrained environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Integrating Domain Knowledge for handling Limited Data in Offline RL
Briti Gangopadhyay, Zhao Wang, Jia-Fong Yeh, Shingo Takamatsu
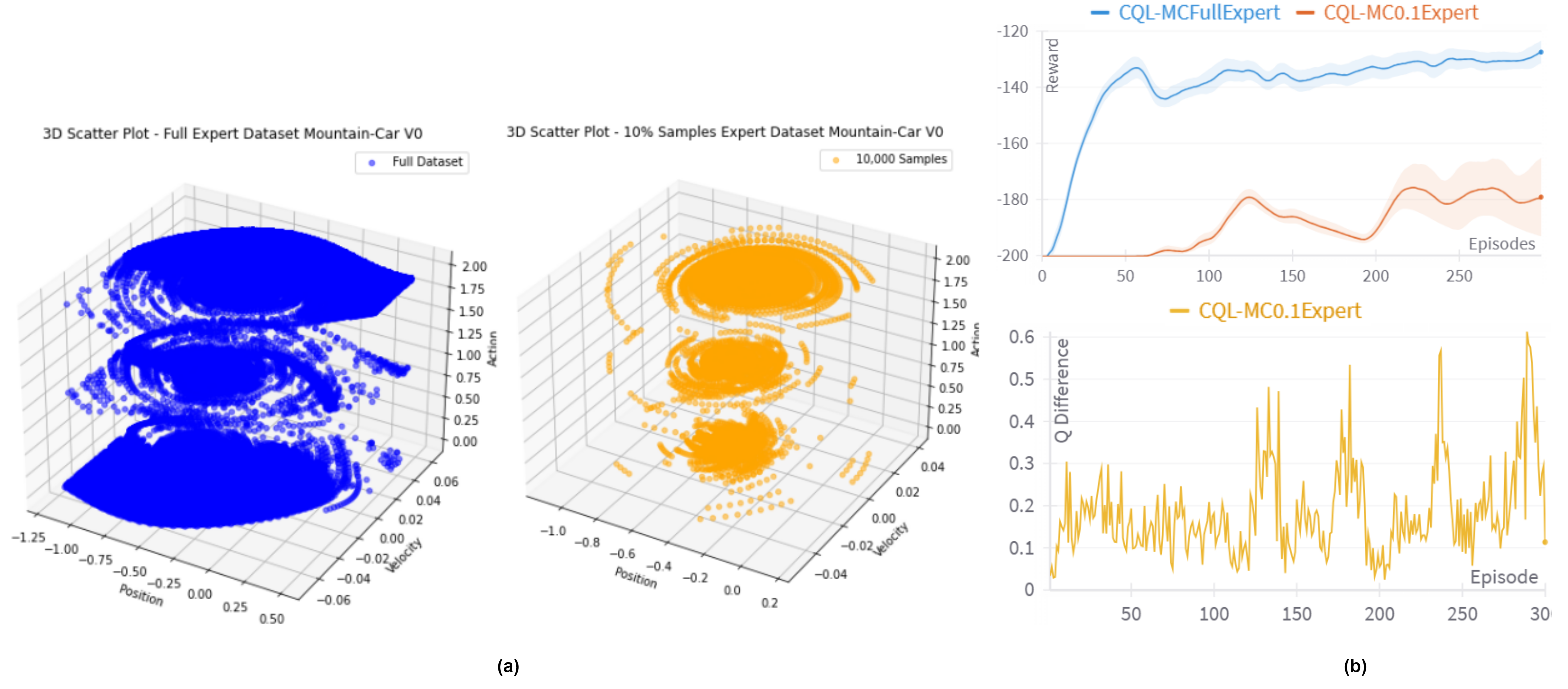
With the ability to learn from static datasets, Offline Reinforcement Learning (RL) emerges as a compelling avenue for real-world applications. However, state-of-the-art offline RL algorithms perform sub-optimally when confronted with limited data confined to specific regions within the state space. The performance degradation is attributed to the inability of offline RL algorithms to learn appropriate actions for rare or unseen observations. This paper proposes a novel domain knowledge-based regularization technique and adaptively refines the initial domain knowledge to considerably boost performance in limited data with partially omitted states. The key insight is that the regularization term mitigates erroneous actions for sparse samples and unobserved states covered by domain knowledge. Empirical evaluations on standard discrete environment datasets demonstrate a substantial average performance increase of at least 27% compared to existing offline RL algorithms operating on limited data.
Read more6/12/2024

0
Augmenting Offline RL with Unlabeled Data
Zhao Wang, Briti Gangopadhyay, Jia-Fong Yeh, Shingo Takamatsu
Recent advancements in offline Reinforcement Learning (Offline RL) have led to an increased focus on methods based on conservative policy updates to address the Out-of-Distribution (OOD) issue. These methods typically involve adding behavior regularization or modifying the critic learning objective, focusing primarily on states or actions with substantial dataset support. However, we challenge this prevailing notion by asserting that the absence of an action or state from a dataset does not necessarily imply its suboptimality. In this paper, we propose a novel approach to tackle the OOD problem. We introduce an offline RL teacher-student framework, complemented by a policy similarity measure. This framework enables the student policy to gain insights not only from the offline RL dataset but also from the knowledge transferred by a teacher policy. The teacher policy is trained using another dataset consisting of state-action pairs, which can be viewed as practical domain knowledge acquired without direct interaction with the environment. We believe this additional knowledge is key to effectively solving the OOD issue. This research represents a significant advancement in integrating a teacher-student network into the actor-critic framework, opening new avenues for studies on knowledge transfer in offline RL and effectively addressing the OOD challenge.
Read more6/12/2024
0
Domain Adaptation for Offline Reinforcement Learning with Limited Samples
Weiqin Chen, Sandipan Mishra, Santiago Paternain
Offline reinforcement learning (RL) learns effective policies from a static target dataset. Despite state-of-the-art (SOTA) offline RL algorithms being promising, they highly rely on the quality of the target dataset. The performance of SOTA algorithms can degrade in scenarios with limited samples in the target dataset, which is often the case in real-world applications. To address this issue, domain adaptation that leverages auxiliary samples from related source datasets (such as simulators) can be beneficial. In this context, determining the optimal way to trade off the source and target datasets remains a critical challenge in offline RL. To the best of our knowledge, this paper proposes the first framework that theoretically and experimentally explores how the weight assigned to each dataset affects the performance of offline RL. We establish the performance bounds and convergence neighborhood of our framework, both of which depend on the selection of the weight. Furthermore, we identify the existence of an optimal weight for balancing the two datasets. All theoretical guarantees and optimal weight depend on the quality of the source dataset and the size of the target dataset. Our empirical results on the well-known Procgen Benchmark substantiate our theoretical contributions.
Read more8/23/2024
🏅
0
DOMAIN: MilDly COnservative Model-BAsed OfflINe Reinforcement Learning
Xiao-Yin Liu, Xiao-Hu Zhou, Mei-Jiang Gui, Xiao-Liang Xie, Shi-Qi Liu, Shuang-Yi Wang, Hao Li, Tian-Yu Xiang, De-Xing Huang, Zeng-Guang Hou
Model-based reinforcement learning (RL), which learns environment model from offline dataset and generates more out-of-distribution model data, has become an effective approach to the problem of distribution shift in offline RL. Due to the gap between the learned and actual environment, conservatism should be incorporated into the algorithm to balance accurate offline data and imprecise model data. The conservatism of current algorithms mostly relies on model uncertainty estimation. However, uncertainty estimation is unreliable and leads to poor performance in certain scenarios, and the previous methods ignore differences between the model data, which brings great conservatism. Therefore, this paper proposes a milDly cOnservative Model-bAsed offlINe RL algorithm (DOMAIN) without estimating model uncertainty to address the above issues. DOMAIN introduces adaptive sampling distribution of model samples, which can adaptively adjust the model data penalty. In this paper, we theoretically demonstrate that the Q value learned by the DOMAIN outside the region is a lower bound of the true Q value, the DOMAIN is less conservative than previous model-based offline RL algorithms and has the guarantee of safety policy improvement. The results of extensive experiments show that DOMAIN outperforms prior RL algorithms on the D4RL dataset benchmark.
Read more7/31/2024