Control of Microrobots Using Model Predictive Control and Gaussian Processes for Disturbance Estimation
2406.02722
0
0

Abstract
This paper presents a control framework for magnetically actuated micron-scale robots ($mu$bots) designed to mitigate disturbances and improve trajectory tracking. To address the challenges posed by unmodeled dynamics and environmental variability, we combine data-driven modeling with model-based control to accurately track desired trajectories using a relatively small amount of data. The system is represented with a simple linear model, and Gaussian Processes (GP) are employed to capture and estimate disturbances. This disturbance-enhanced model is then integrated into a Model Predictive Controller (MPC). Our approach demonstrates promising performance in both simulation and experimental setups, showcasing its potential for precise and reliable microrobot control in complex environments.
Create account to get full access
Overview
- The paper explores the use of Model Predictive Control (MPC) and Gaussian Processes (GP) to control microrobots and estimate disturbances.
- MPC is used to generate control inputs that guide the microrobot to a desired position, while GPs are employed to model and compensate for external disturbances.
- The proposed approach is validated through simulations and experimental demonstrations on a microrobot system.
Plain English Explanation
In this paper, the researchers present a way to control the movement of tiny robots, called microrobots, using a combination of two key techniques: Model Predictive Control (MPC) and Gaussian Processes (GPs).
MPC is a control method that allows the researchers to calculate the best actions the microrobot should take to reach a desired position. It does this by predicting the future behavior of the microrobot and choosing the actions that will get it to the target as efficiently as possible.
To make these predictions, the researchers need to know how the microrobot will respond to different control inputs. However, the microrobot's behavior can be affected by external forces, like air currents or surface interactions, which can be difficult to model accurately. This is where GPs come in.
GPs are a way of modeling and estimating these external disturbances. By continuously observing the microrobot's actual movements and comparing them to the predicted behavior, the researchers can use GPs to learn what the disturbances are and compensate for them.
The combination of MPC and GPs allows the researchers to precisely control the microrobot's movements, even in the presence of unpredictable external forces. They demonstrate the effectiveness of their approach through simulations and experiments with a real microrobot system.
Technical Explanation
The paper presents a control framework for microrobots that combines Model Predictive Control (MPC) and Gaussian Processes (GPs) for disturbance estimation.
MPC is used to generate the control inputs that guide the microrobot to a desired target position. The MPC algorithm optimizes a cost function to determine the sequence of control actions that will minimize the error between the microrobot's predicted future trajectory and the desired trajectory.
To account for uncertainties and external disturbances that can affect the microrobot's behavior, the researchers employ GPs to model these disturbances. The GP model is learned from the difference between the actual microrobot movements and the predictions made by the nominal dynamic model used in the MPC.
The GP-based disturbance estimate is then incorporated into the MPC optimization problem to compensate for the modeled disturbances and improve the control performance. This data-driven approach to disturbance estimation allows the controller to adapt to changing environmental conditions without requiring detailed modeling of the disturbance sources.
The proposed control framework is evaluated through both simulations and experiments on a microrobot testbed. The results demonstrate the ability of the MPC-GP approach to accurately track desired trajectories and reject disturbances, outperforming a baseline MPC controller without disturbance estimation.
Critical Analysis
The paper presents a promising approach for controlling the movement of microrobots in the presence of external disturbances. The combination of MPC and GP-based disturbance estimation is a well-justified and theoretically sound technique.
One potential limitation is the reliance on a priori knowledge of the microrobot's nominal dynamics model, which is required for the MPC formulation. In real-world scenarios, this model may not be perfectly known, and the researchers do not address how their approach would handle model uncertainties.
Additionally, the experimental validation is conducted in a relatively simplified, laboratory-controlled environment. It would be important to assess the performance of the proposed framework in more complex, real-world settings with diverse disturbance sources and operating conditions.
Further research could explore the integration of the GP-based disturbance estimation with other control strategies, such as adaptive or robust control methods, to enhance the overall robustness and adaptability of the microrobot control system.
Conclusion
In this paper, the researchers present a control framework for microrobots that combines Model Predictive Control (MPC) and Gaussian Processes (GPs) to enable precise trajectory tracking in the presence of external disturbances. The MPC generates optimal control inputs to guide the microrobot, while the GP-based disturbance estimation compensates for unpredictable forces acting on the system.
The proposed approach demonstrates promising results in both simulations and experiments, showcasing the ability to accurately track desired trajectories and reject disturbances. This work contributes to the development of more reliable and adaptable control systems for microrobots, which have numerous applications in fields such as medicine, manufacturing, and environmental monitoring.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

A Tutorial on Gaussian Process Learning-based Model Predictive Control
Jie Wang, Youmin Zhang
0
0
This tutorial provides a systematic introduction to Gaussian process learning-based model predictive control (GP-MPC), an advanced approach integrating Gaussian process (GP) with model predictive control (MPC) for enhanced control in complex systems. It begins with GP regression fundamentals, illustrating how it enriches MPC with enhanced predictive accuracy and robust handling of uncertainties. A central contribution of this tutorial is the first detailed, systematic mathematical formulation of GP-MPC in literature, focusing on deriving the approximation of means and variances propagation for GP multi-step predictions. Practical applications in robotics control, such as path-following for mobile robots in challenging terrains and mixed-vehicle platooning, are discussed to demonstrate the real-world effectiveness and adaptability of GP-MPC. This tutorial aims to make GP-MPC accessible to researchers and practitioners, enriching the learning-based control field with in-depth theoretical and practical insights and fostering further innovations in complex system control.
4/8/2024
Data-driven Force Observer for Human-Robot Interaction with Series Elastic Actuators using Gaussian Processes
Samuel Tesfazgi, Markus Ke{ss}ler, Emilio Trigili, Armin Lederer, Sandra Hirche
0
0
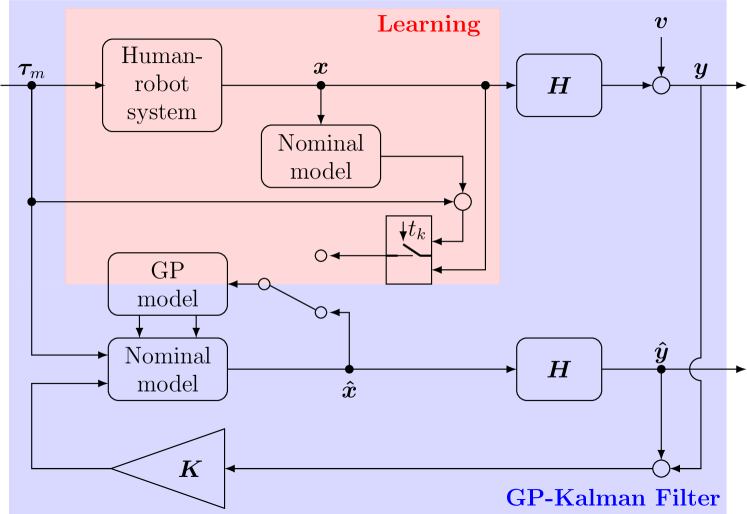
Ensuring safety and adapting to the user's behavior are of paramount importance in physical human-robot interaction. Thus, incorporating elastic actuators in the robot's mechanical design has become popular, since it offers intrinsic compliance and additionally provide a coarse estimate for the interaction force by measuring the deformation of the elastic components. While observer-based methods have been shown to improve these estimates, they rely on accurate models of the system, which are challenging to obtain in complex operating environments. In this work, we overcome this issue by learning the unknown dynamics components using Gaussian process (GP) regression. By employing the learned model in a Bayesian filtering framework, we improve the estimation accuracy and additionally obtain an observer that explicitly considers local model uncertainty in the confidence measure of the state estimate. Furthermore, we derive guaranteed estimation error bounds, thus, facilitating the use in safety-critical applications. We demonstrate the effectiveness of the proposed approach experimentally in a human-exoskeleton interaction scenario.
5/15/2024

Motion Prediction with Gaussian Processes for Safe Human-Robot Interaction in Virtual Environments
Stanley Mugisha, Vamsi Krishna Guda, Christine Chevallereau, Damien Chablat, Matteo Zoppi
0
0
Humans use collaborative robots as tools for accomplishing various tasks. The interaction between humans and robots happens in tight shared workspaces. However, these machines must be safe to operate alongside humans to minimize the risk of accidental collisions. Ensuring safety imposes many constraints, such as reduced torque and velocity limits during operation, thus increasing the time to accomplish many tasks. However, for applications such as using collaborative robots as haptic interfaces with intermittent contacts for virtual reality applications, speed limitations result in poor user experiences. This research aims to improve the efficiency of a collaborative robot while improving the safety of the human user. We used Gaussian process models to predict human hand motion and developed strategies for human intention detection based on hand motion and gaze to improve the time for the robot and human security in a virtual environment. We then studied the effect of prediction. Results from comparisons show that the prediction models improved the robot time by 3% and safety by 17%. When used alongside gaze, prediction with Gaussian process models resulted in an improvement of the robot time by 2% and the safety by 13%.
5/21/2024
Biased-MPPI: Informing Sampling-Based Model Predictive Control by Fusing Ancillary Controllers
Elia Trevisan, Javier Alonso-Mora
0
0
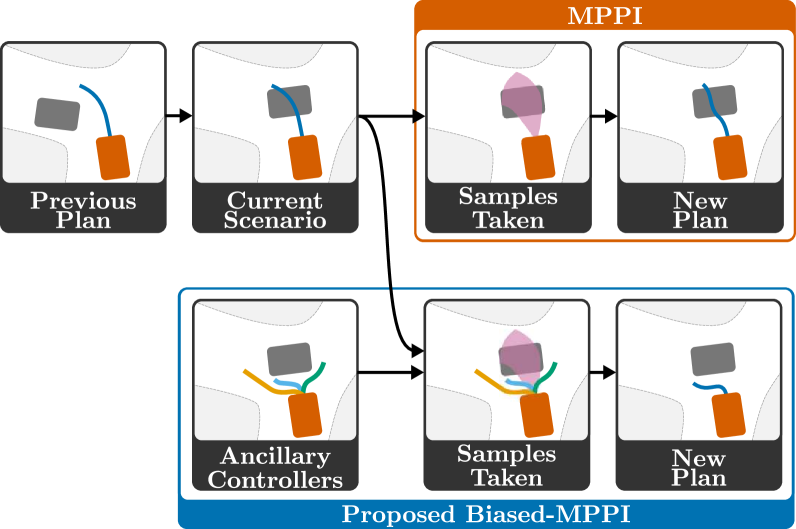
Motion planning for autonomous robots in dynamic environments poses numerous challenges due to uncertainties in the robot's dynamics and interaction with other agents. Sampling-based MPC approaches, such as Model Predictive Path Integral (MPPI) control, have shown promise in addressing these complex motion planning problems. However, the performance of MPPI relies heavily on the choice of sampling distribution. Existing literature often uses the previously computed input sequence as the mean of a Gaussian distribution for sampling, leading to potential failures and local minima. In this paper, we propose a novel derivation of MPPI that allows for arbitrary sampling distributions to enhance efficiency, robustness, and convergence while alleviating the problem of local minima. We present an efficient importance sampling scheme that combines classical and learning-based ancillary controllers simultaneously, resulting in more informative sampling and control fusion. Several simulated and real-world demonstrate the validity of our approach.
5/7/2024