Motion Prediction with Gaussian Processes for Safe Human-Robot Interaction in Virtual Environments
2405.09109
0
0

Abstract
Humans use collaborative robots as tools for accomplishing various tasks. The interaction between humans and robots happens in tight shared workspaces. However, these machines must be safe to operate alongside humans to minimize the risk of accidental collisions. Ensuring safety imposes many constraints, such as reduced torque and velocity limits during operation, thus increasing the time to accomplish many tasks. However, for applications such as using collaborative robots as haptic interfaces with intermittent contacts for virtual reality applications, speed limitations result in poor user experiences. This research aims to improve the efficiency of a collaborative robot while improving the safety of the human user. We used Gaussian process models to predict human hand motion and developed strategies for human intention detection based on hand motion and gaze to improve the time for the robot and human security in a virtual environment. We then studied the effect of prediction. Results from comparisons show that the prediction models improved the robot time by 3% and safety by 17%. When used alongside gaze, prediction with Gaussian process models resulted in an improvement of the robot time by 2% and the safety by 13%.
Create account to get full access
Overview
- This paper presents a method for predicting human motion using Gaussian Process models in virtual environments to enable safe human-robot interaction.
- The approach aims to forecast human movements and anticipate their actions to allow collaborative robots to plan their own motions and avoid potential collisions or interference.
- The authors demonstrate their technique in a simulated environment with a robot arm and a human user, showing how the Gaussian Process model can accurately predict the human's future trajectory.
Plain English Explanation
The researchers have developed a new way to predict how people will move in virtual environments. They use a machine learning technique called Gaussian Processes to forecast the future movements of a human user interacting with a robot. The goal is to enable the robot to anticipate the person's actions and plan its own motions accordingly, in order to avoid collisions or disruptions during their collaboration.
In a simulated setup, the team demonstrated how their Gaussian Process model can accurately predict the trajectory of a human's movements. This allows the robot to adapt its behavior and maneuver safely around the person, facilitating smooth and safe human-robot interaction in virtual environments. The key advantage of this approach is that it enables the robot to be more responsive and aware of the human's intended actions, promoting safer and more seamless cooperation between the two.
Technical Explanation
The authors propose using Gaussian Process models to predict human motion in virtual environments, with the goal of enabling safer human-robot interaction. Gaussian Processes are a flexible machine learning technique that can model complex, nonlinear relationships between variables.
In their system, the Gaussian Process model is trained on motion capture data of a human user interacting with a robotic arm in a simulated environment. The model learns to map the user's current state (position, velocity, etc.) to their future trajectory over a short time horizon. During runtime, the robot can then use the Gaussian Process predictions to anticipate the human's intended motions and plan its own movements to avoid collisions or interference, as demonstrated in the MoveTouch and Expectable Motion Unit papers.
The authors evaluate their approach in simulation, showing that the Gaussian Process model can accurately predict the human's future trajectory several seconds in advance. This allows the robot to proactively adjust its behavior and navigate safely around the user, enabling more natural and seamless human-robot collaboration in virtual environments.
Critical Analysis
The researchers provide a compelling demonstration of how Gaussian Process models can be used to anticipate human movements in virtual settings, which is an important capability for ensuring safe and effective human-robot interaction. However, the paper does not address the potential limitations of this approach.
For example, the performance of the Gaussian Process model may degrade in more complex or dynamic environments, where the human's movements become less predictable. Additionally, the training data used in this study was collected in a controlled, simulated setting, and it's unclear how well the model would generalize to real-world situations with more variation and unpredictability.
Further research is needed to assess the robustness and scalability of this approach, as well as to explore ways to combine the Gaussian Process predictions with other sensing modalities or planning algorithms to enhance the overall safety and responsiveness of the human-robot system. Integrating this motion prediction technique with other complementary methods, as discussed in the related works, could lead to more comprehensive and reliable solutions for safe human-robot collaboration.
Conclusion
This paper presents a novel application of Gaussian Process models to predict human motion in virtual environments, with the goal of enabling safer and more seamless human-robot interaction. By anticipating the user's intended movements, the robot can plan its own actions to avoid collisions and disruptions, facilitating more natural and efficient collaboration.
While the authors demonstrate promising results in simulation, further research is needed to assess the real-world applicability and limitations of this approach. Integrating the Gaussian Process predictions with other sensing and planning techniques could help to create more robust and adaptable systems for safe human-robot interaction in a variety of settings, from manufacturing to healthcare to entertainment.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Integrating Uncertainty-Aware Human Motion Prediction into Graph-Based Manipulator Motion Planning
Wansong Liu, Kareem Eltouny, Sibo Tian, Xiao Liang, Minghui Zheng
0
0
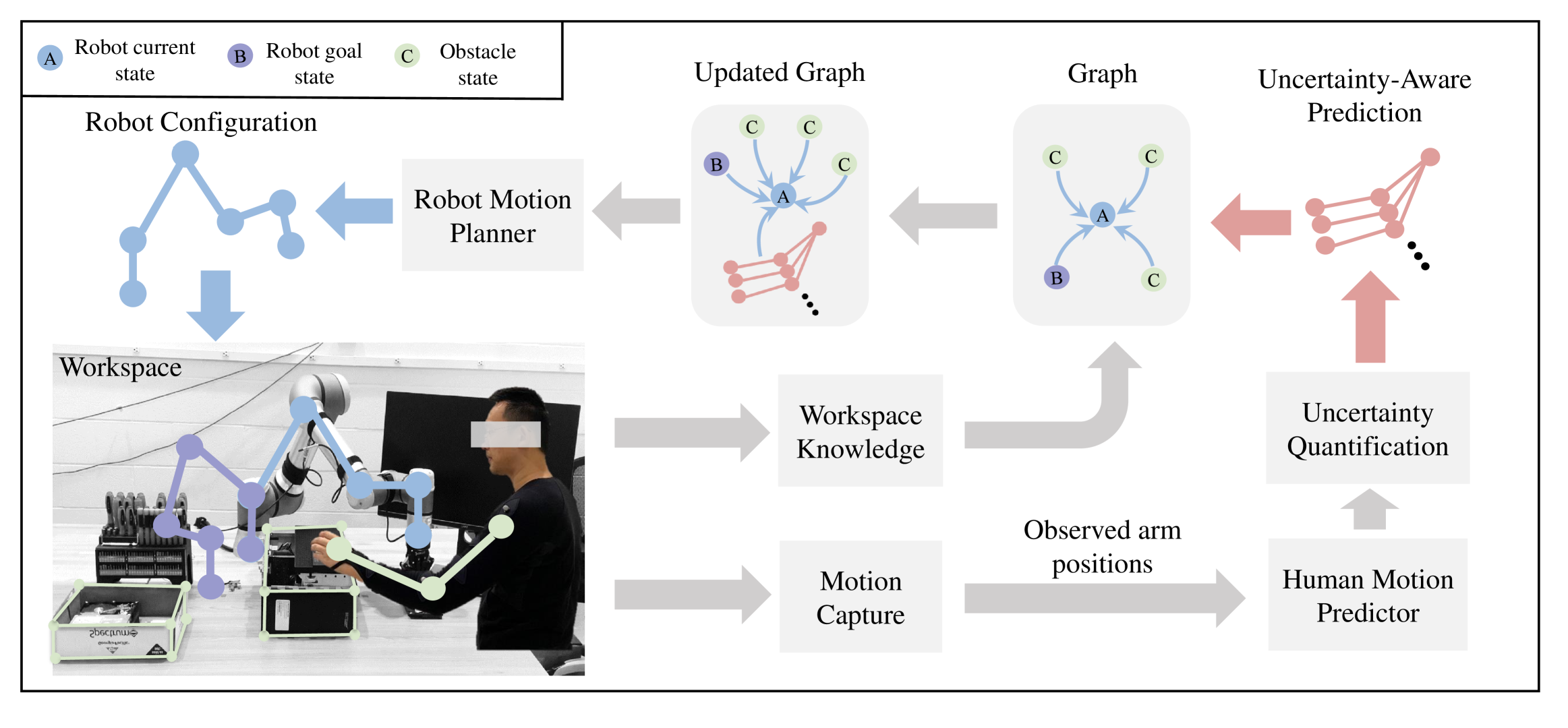
There has been a growing utilization of industrial robots as complementary collaborators for human workers in re-manufacturing sites. Such a human-robot collaboration (HRC) aims to assist human workers in improving the flexibility and efficiency of labor-intensive tasks. In this paper, we propose a human-aware motion planning framework for HRC to effectively compute collision-free motions for manipulators when conducting collaborative tasks with humans. We employ a neural human motion prediction model to enable proactive planning for manipulators. Particularly, rather than blindly trusting and utilizing predicted human trajectories in the manipulator planning, we quantify uncertainties of the neural prediction model to further ensure human safety. Moreover, we integrate the uncertainty-aware prediction into a graph that captures key workspace elements and illustrates their interconnections. Then a graph neural network is leveraged to operate on the constructed graph. Consequently, robot motion planning considers both the dependencies among all the elements in the workspace and the potential influence of future movements of human workers. We experimentally validate the proposed planning framework using a 6-degree-of-freedom manipulator in a shared workspace where a human is performing disassembling tasks. The results demonstrate the benefits of our approach in terms of improving the smoothness and safety of HRC. A brief video introduction of this work is available as the supplemental materials.
5/17/2024
Data-driven Force Observer for Human-Robot Interaction with Series Elastic Actuators using Gaussian Processes
Samuel Tesfazgi, Markus Ke{ss}ler, Emilio Trigili, Armin Lederer, Sandra Hirche
0
0
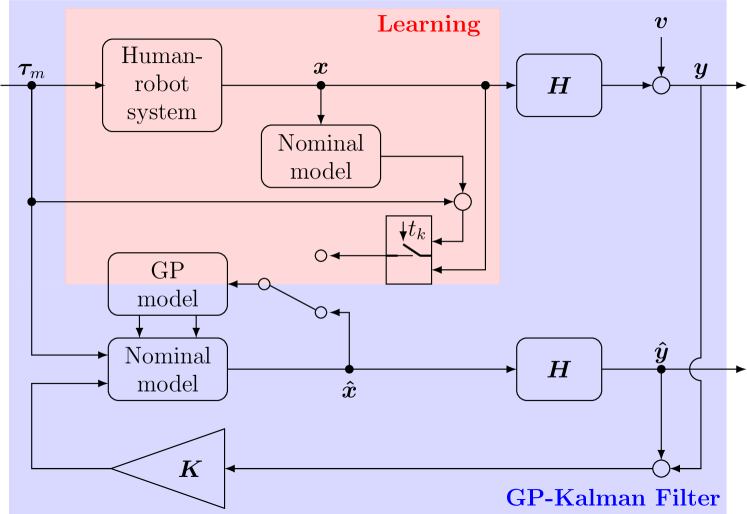
Ensuring safety and adapting to the user's behavior are of paramount importance in physical human-robot interaction. Thus, incorporating elastic actuators in the robot's mechanical design has become popular, since it offers intrinsic compliance and additionally provide a coarse estimate for the interaction force by measuring the deformation of the elastic components. While observer-based methods have been shown to improve these estimates, they rely on accurate models of the system, which are challenging to obtain in complex operating environments. In this work, we overcome this issue by learning the unknown dynamics components using Gaussian process (GP) regression. By employing the learned model in a Bayesian filtering framework, we improve the estimation accuracy and additionally obtain an observer that explicitly considers local model uncertainty in the confidence measure of the state estimate. Furthermore, we derive guaranteed estimation error bounds, thus, facilitating the use in safety-critical applications. We demonstrate the effectiveness of the proposed approach experimentally in a human-exoskeleton interaction scenario.
5/15/2024

Model Predictive Trajectory Planning for Human-Robot Handovers
Thies Oelerich, Christian Hartl-Nesic, Andreas Kugi
0
0
This work develops a novel trajectory planner for human-robot handovers. The handover requirements can naturally be handled by a path-following-based model predictive controller, where the path progress serves as a progress measure of the handover. Moreover, the deviations from the path are used to follow human motion by adapting the path deviation bounds with a handover location prediction. A Gaussian process regression model, which is trained on known handover trajectories, is employed for this prediction. Experiments with a collaborative 7-DoF robotic manipulator show the effectiveness and versatility of the proposed approach.
4/12/2024

MoveTouch: Robotic Motion Capturing System with Wearable Tactile Display to Achieve Safe HRI
Ali Alabbas, Miguel Altamirano Cabrera, Mohamed Sayed, Oussama Alyounes, Qian Liu, Dzmitry Tsetserukou
0
0
The collaborative robot market is flourishing as there is a trend towards simplification, modularity, and increased flexibility on the production line. But when humans and robots are collaborating in a shared environment, the safety of humans should be a priority. We introduce a novel wearable robotic system to enhance safety during Human Robot Interaction (HRI). The proposed wearable robot is designed to hold a fiducial marker and maintain its visibility to the tracking system, which, in turn, localizes the user's hand with good accuracy and low latency and provides haptic feedback on the user's wrist. The haptic feedback guides the user's hand movement during collaborative tasks in order to increase safety and enhance collaboration efficiency. A user study was conducted to assess the recognition and discriminability of ten designed haptic patterns applied to the volar and dorsal parts of the user's wrist. As a result, four patterns with a high recognition rate were chosen to be incorporated into our system. A second experiment was carried out to evaluate the system integration into real-world collaborative tasks.
5/9/2024