Biased-MPPI: Informing Sampling-Based Model Predictive Control by Fusing Ancillary Controllers

0
Sign in to get full access
Introduction
Previous Work
Sampling-based Model Predictive Path Integral (MPPI) control is a powerful technique for planning in complex, high-dimensional environments. However, it can struggle to find optimal solutions, especially in challenging scenarios. Previous research has explored ways to improve MPPI, such as low-frequency sampling, safety constraints, spline interpolation, and actor-critic methods. These approaches have made progress, but there is still room for improvement in terms of optimality and robustness.
Contributions
This paper introduces "Biased-MPPI," a novel sampling-based control method that fuses MPPI with additional controllers to guide the sampling process and improve performance. By incorporating information from these ancillary controllers, Biased-MPPI can more effectively explore the state space and find better solutions. The key ideas and contributions of this work are:
- Biased-MPPI: A new sampling-based MPC algorithm that combines MPPI with additional controllers to inform the sampling process.
- Theoretical analysis: The authors provide a theoretical framework for analyzing the properties of Biased-MPPI, including its convergence and optimality guarantees.
- Experimental validation: The paper demonstrates the advantages of Biased-MPPI compared to standard MPPI and other state-of-the-art methods on a range of challenging control tasks.
Plain English Explanation
Biased-MPPI is a new technique for planning the movements of robots and other autonomous systems. It builds on a popular method called Model Predictive Path Integral (MPPI) control, which generates a sequence of actions by randomly sampling possible future trajectories and evaluating them based on a cost function.
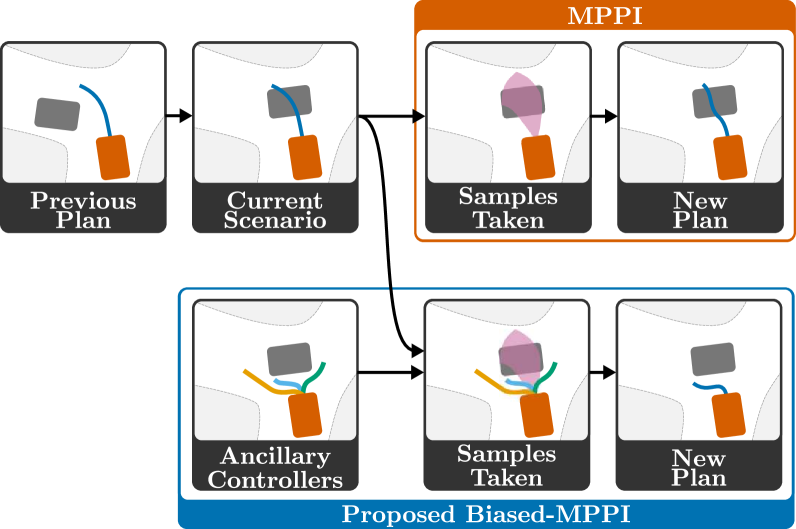
The key insight behind Biased-MPPI is that we can improve the performance of MPPI by incorporating additional control algorithms, called "ancillary controllers," to guide the sampling process. These ancillary controllers provide extra information that helps Biased-MPPI explore the state space more effectively and find better solutions, especially in challenging scenarios.
For example, imagine you're trying to control a robot to navigate through a cluttered environment. MPPI might struggle to find the optimal path, but by also considering the outputs of other controllers (e.g., one that tries to avoid obstacles, and another that aims to reach the goal quickly), Biased-MPPI can sample trajectories that are more likely to be successful.
The paper provides a theoretical analysis of Biased-MPPI, showing that it has desirable properties like convergence and optimality guarantees. It also demonstrates the advantages of Biased-MPPI through experiments on a variety of control tasks, where it outperforms standard MPPI and other state-of-the-art methods.
Technical Explanation
Biased-MPPI builds on the Model Predictive Path Integral (MPPI) control framework, which uses a sampling-based approach to plan optimal trajectories. In standard MPPI, the sampling process is unbiased, meaning that the samples are drawn from a purely random distribution.
The key innovation in Biased-MPPI is the incorporation of additional "ancillary controllers" to guide the sampling process. These ancillary controllers provide extra information that can help Biased-MPPI explore the state space more effectively and find better solutions, especially in challenging scenarios.
Mathematically, Biased-MPPI modifies the sampling distribution used in MPPI to be a weighted combination of the original random distribution and the outputs of the ancillary controllers. This biases the sampling towards trajectories that are more likely to be successful, as determined by the ancillary controllers.
The paper provides a theoretical analysis of Biased-MPPI, showing that it maintains the desirable properties of MPPI, such as convergence and optimality guarantees. It also presents experimental results on a range of control tasks, including navigation, manipulation, and motor control, where Biased-MPPI outperforms standard MPPI and other state-of-the-art methods.
Critical Analysis
The Biased-MPPI approach is a promising step forward in improving the performance of sampling-based MPC techniques. By incorporating additional controllers to guide the sampling process, the method can overcome some of the limitations of standard MPPI, especially in complex, high-dimensional environments.
However, the paper does not address some potential limitations and areas for future research. For example, the choice and design of the ancillary controllers may significantly impact the performance of Biased-MPPI, and the authors do not provide guidance on how to select or tune these controllers. Additionally, the theoretical analysis assumes certain conditions, such as the convexity of the cost function, which may not always hold in practice.
Furthermore, the experimental evaluation focuses on relatively simple control tasks, and it would be valuable to see how Biased-MPPI performs on more challenging, real-world scenarios with higher-dimensional state spaces and complex dynamics. Exploring the scalability and computational efficiency of the method would also be an important area for further investigation.
Overall, the Biased-MPPI approach is a promising contribution to the field of sampling-based MPC, but additional research is needed to fully understand its limitations and potential, as well as to explore ways to make it more robust and broadly applicable.
Conclusion
This paper introduces Biased-MPPI, a novel sampling-based control method that combines Model Predictive Path Integral (MPPI) control with additional ancillary controllers to guide the sampling process and improve performance. By fusing information from these ancillary controllers, Biased-MPPI can more effectively explore the state space and find better solutions, especially in challenging control scenarios.
The authors provide a theoretical analysis of Biased-MPPI, demonstrating its desirable properties such as convergence and optimality guarantees. They also present experimental results showing that Biased-MPPI outperforms standard MPPI and other state-of-the-art methods on a range of control tasks.
While Biased-MPPI represents a valuable contribution to the field of sampling-based MPC, further research is needed to address potential limitations, such as the design and selection of ancillary controllers, and to explore its performance on more complex, real-world problems. Overall, this work highlights the potential of fusing multiple control algorithms to enhance the capabilities of sampling-based planning and control techniques.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Biased-MPPI: Informing Sampling-Based Model Predictive Control by Fusing Ancillary Controllers
Elia Trevisan, Javier Alonso-Mora
Motion planning for autonomous robots in dynamic environments poses numerous challenges due to uncertainties in the robot's dynamics and interaction with other agents. Sampling-based MPC approaches, such as Model Predictive Path Integral (MPPI) control, have shown promise in addressing these complex motion planning problems. However, the performance of MPPI relies heavily on the choice of sampling distribution. Existing literature often uses the previously computed input sequence as the mean of a Gaussian distribution for sampling, leading to potential failures and local minima. In this paper, we propose a novel derivation of MPPI that allows for arbitrary sampling distributions to enhance efficiency, robustness, and convergence while alleviating the problem of local minima. We present an efficient importance sampling scheme that combines classical and learning-based ancillary controllers simultaneously, resulting in more informative sampling and control fusion. Several simulated and real-world demonstrate the validity of our approach.
Read more5/7/2024

0
Low Frequency Sampling in Model Predictive Path Integral Control
Bogdan Vlahov, Jason Gibson, David D. Fan, Patrick Spieler, Ali-akbar Agha-mohammadi, Evangelos A. Theodorou
Sampling-based model-predictive controllers have become a powerful optimization tool for planning and control problems in various challenging environments. In this paper, we show how the default choice of uncorrelated Gaussian distributions can be improved upon with the use of a colored noise distribution. Our choice of distribution allows for the emphasis on low frequency control signals, which can result in smoother and more exploratory samples. We use this frequency-based sampling distribution with Model Predictive Path Integral (MPPI) in both hardware and simulation experiments to show better or equal performance on systems with various speeds of input response.
Read more4/19/2024

0
Model Predictive Path Integral Control for Agile Unmanned Aerial Vehicles
Michal Minarik, Robert Penicka, Vojtech Vonasek, Martin Saska
This paper introduces a control architecture for real-time and onboard control of Unmanned Aerial Vehicles (UAVs) in environments with obstacles using the Model Predictive Path Integral (MPPI) methodology. MPPI allows the use of the full nonlinear model of UAV dynamics and a more general cost function at the cost of a high computational demand. To run the controller in real-time, the sampling-based optimization is performed in parallel on a graphics processing unit onboard the UAV. We propose an approach to the simulation of the nonlinear system which respects low-level constraints, while also able to dynamically handle obstacle avoidance, and prove that our methods are able to run in real-time without the need for external computers. The MPPI controller is compared to MPC and SE(3) controllers on the reference tracking task, showing a comparable performance. We demonstrate the viability of the proposed method in multiple simulation and real-world experiments, tracking a reference at up to 44 km/h and acceleration close to 20 m/s^2, while still being able to avoid obstacles. To the best of our knowledge, this is the first method to demonstrate an MPPI-based approach in real flight.
Read more7/16/2024

0
Chance-Constrained Information-Theoretic Stochastic Model Predictive Control with Safety Shielding
Ji Yin, Panagiotis Tsiotras, Karl Berntorp
This paper introduces a novel nonlinear stochastic model predictive control path integral (MPPI) method, which considers chance constraints on system states. The proposed belief-space stochastic MPPI (BSS-MPPI) applies Monte-Carlo sampling to evaluate state distributions resulting from underlying systematic disturbances, and utilizes a Control Barrier Function (CBF) inspired heuristic in belief space to fulfill the specified chance constraints. Compared to several previous stochastic predictive control methods, our approach applies to general nonlinear dynamics without requiring the computationally expensive system linearization step. Moreover, the BSS-MPPI controller can solve optimization problems without limiting the form of the objective function and chance constraints. By multi-threading the sampling process using a GPU, we can achieve fast real-time planning for time- and safety-critical tasks such as autonomous racing. Our results on a realistic race-car simulation study show significant reductions in constraint violation compared to some of the prior MPPI approaches, while being comparable in computation times.
Read more8/16/2024