Convergence to Nash Equilibrium and No-regret Guarantee in (Markov) Potential Games
2404.06516
0
0
🤷
Abstract
In this work, we study potential games and Markov potential games under stochastic cost and bandit feedback. We propose a variant of the Frank-Wolfe algorithm with sufficient exploration and recursive gradient estimation, which provably converges to the Nash equilibrium while attaining sublinear regret for each individual player. Our algorithm simultaneously achieves a Nash regret and a regret bound of $O(T^{4/5})$ for potential games, which matches the best available result, without using additional projection steps. Through carefully balancing the reuse of past samples and exploration of new samples, we then extend the results to Markov potential games and improve the best available Nash regret from $O(T^{5/6})$ to $O(T^{4/5})$. Moreover, our algorithm requires no knowledge of the game, such as the distribution mismatch coefficient, which provides more flexibility in its practical implementation. Experimental results corroborate our theoretical findings and underscore the practical effectiveness of our method.
Create account to get full access
Overview
- This paper presents several new algorithms and theoretical results for online learning in strongly convex and strongly monotone settings.
- The algorithms proposed aim to achieve "doubly optimal" regret bounds, meaning they are optimal in terms of both the dependence on the number of rounds and the problem parameters.
- The paper also explores distributed and variance-reduced variants of the proposed algorithms, as well as their applications to incentive-compatible online learning.
Plain English Explanation
The research paper you provided focuses on developing new techniques for online learning, which is the process of making decisions or predictions sequentially without full knowledge of the future. The authors introduce several algorithms that are designed to perform this task optimally, both in terms of the number of rounds (or iterations) and the specific characteristics of the problem at hand.
In strongly convex and strongly monotone settings, the proposed algorithms aim to achieve "doubly optimal" regret bounds. Regret is a measure of how much the learner's cumulative performance falls short of the best possible outcome in hindsight. Achieving doubly optimal regret means the algorithms perform as well as possible with respect to both the number of rounds and the problem parameters.
The paper also explores distributed and variance-reduced versions of the algorithms, which can improve their efficiency and scalability. Additionally, the authors investigate applying these techniques to incentive-compatible online learning, where the goal is to design learning algorithms that incentivize honest reporting from the participants.
Technical Explanation
The paper introduces several new algorithms for doubly optimal no-regret online learning in strongly convex and strongly monotone settings. The authors prove that these algorithms achieve optimal regret bounds that depend on both the number of rounds and the problem parameters, such as the strong convexity or strong monotonicity constants.
The paper also presents adaptive versions of the algorithms that do not require prior knowledge of the problem parameters, making them more practical for real-world applications. The authors further explore distributed variants of the algorithms, which can improve scalability and efficiency in multi-agent or multi-stage settings.
Additionally, the paper investigates variance-reduced policy gradient approaches for solving infinite-horizon reinforcement learning problems, which can provide faster convergence rates compared to standard policy gradient methods.
Finally, the authors consider the application of their techniques to incentive-compatible online learning, where the goal is to design learning algorithms that incentivize honest reporting from the participants.
Critical Analysis
The paper presents a comprehensive set of theoretical results and algorithmic developments in the field of online learning. The authors have made significant contributions by developing "doubly optimal" no-regret algorithms that are optimal with respect to both the number of rounds and the problem parameters.
One potential limitation of the work is the strong assumptions made about the convexity and monotonicity of the problem setting. While these assumptions are common in the theoretical analysis of online learning, they may not always hold in real-world applications. The authors acknowledge this and suggest that exploring more general settings could be an interesting direction for future research.
Additionally, the distributed and variance-reduced variants of the algorithms introduced in the paper are promising, but their practical performance and scalability may depend on the specific problem domain and hardware constraints. Further empirical evaluation of these algorithms in diverse settings would help validate their effectiveness.
Finally, the application of the proposed techniques to incentive-compatible online learning is an intriguing area for further exploration. Ensuring truthful participation is a crucial concern in many real-world learning problems, and the authors' work in this direction could have significant implications for the field.
Conclusion
This paper makes important contributions to the field of online learning by developing a suite of "doubly optimal" no-regret algorithms with strong theoretical guarantees. The authors' work advances the state-of-the-art in both the theoretical understanding and practical implementation of online learning techniques.
The proposed algorithms and their variants, including the distributed and variance-reduced versions, have the potential to significantly improve the performance and scalability of online learning systems. Furthermore, the application of these techniques to incentive-compatible learning problems opens up new avenues for research and practical impact.
Overall, this paper represents a valuable addition to the literature on online learning and optimization, and its findings and methodologies are likely to inspire further advancements in the field.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
$widetilde{O}(T^{-1})$ Convergence to (Coarse) Correlated Equilibria in Full-Information General-Sum Markov Games
Weichao Mao, Haoran Qiu, Chen Wang, Hubertus Franke, Zbigniew Kalbarczyk, Tamer Bac{s}ar
0
0
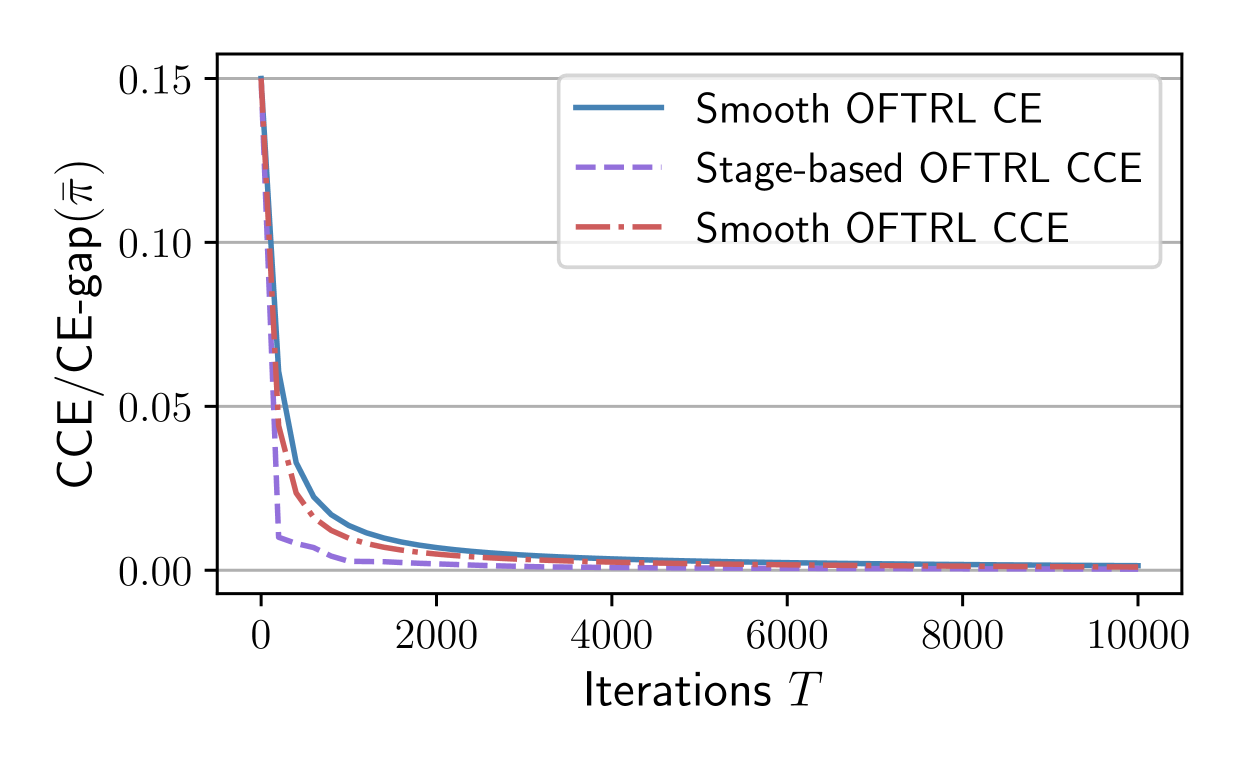
No-regret learning has a long history of being closely connected to game theory. Recent works have devised uncoupled no-regret learning dynamics that, when adopted by all the players in normal-form games, converge to various equilibrium solutions at a near-optimal rate of $widetilde{O}(T^{-1})$, a significant improvement over the $O(1/sqrt{T})$ rate of classic no-regret learners. However, analogous convergence results are scarce in Markov games, a more generic setting that lays the foundation for multi-agent reinforcement learning. In this work, we close this gap by showing that the optimistic-follow-the-regularized-leader (OFTRL) algorithm, together with appropriate value update procedures, can find $widetilde{O}(T^{-1})$-approximate (coarse) correlated equilibria in full-information general-sum Markov games within $T$ iterations. Numerical results are also included to corroborate our theoretical findings.
4/24/2024
🔗
No-Regret Learning of Nash Equilibrium for Black-Box Games via Gaussian Processes
Minbiao Han, Fengxue Zhang, Yuxin Chen
0
0
This paper investigates the challenge of learning in black-box games, where the underlying utility function is unknown to any of the agents. While there is an extensive body of literature on the theoretical analysis of algorithms for computing the Nash equilibrium with complete information about the game, studies on Nash equilibrium in black-box games are less common. In this paper, we focus on learning the Nash equilibrium when the only available information about an agent's payoff comes in the form of empirical queries. We provide a no-regret learning algorithm that utilizes Gaussian processes to identify the equilibrium in such games. Our approach not only ensures a theoretical convergence rate but also demonstrates effectiveness across a variety collection of games through experimental validation.
5/15/2024
🔍
Learning Nash Equilibria in Zero-Sum Markov Games: A Single Time-scale Algorithm Under Weak Reachability
Reda Ouhamma, Maryam Kamgarpour
0
0
We consider decentralized learning for zero-sum games, where players only see their payoff information and are agnostic to actions and payoffs of the opponent. Previous works demonstrated convergence to a Nash equilibrium in this setting using double time-scale algorithms under strong reachability assumptions. We address the open problem of achieving an approximate Nash equilibrium efficiently with an uncoupled and single time-scale algorithm under weaker conditions. Our contribution is a rational and convergent algorithm, utilizing Tsallis-entropy regularization in a value-iteration-based approach. The algorithm learns an approximate Nash equilibrium in polynomial time, requiring only the existence of a policy pair that induces an irreducible and aperiodic Markov chain, thus considerably weakening past assumptions. Our analysis leverages negative drift inequalities and introduces novel properties of Tsallis entropy that are of independent interest.
5/27/2024
✅
Doubly Optimal No-Regret Online Learning in Strongly Monotone Games with Bandit Feedback
Wenjia Ba, Tianyi Lin, Jiawei Zhang, Zhengyuan Zhou
0
0
We consider online no-regret learning in unknown games with bandit feedback, where each player can only observe its reward at each time -- determined by all players' current joint action -- rather than its gradient. We focus on the class of textit{smooth and strongly monotone} games and study optimal no-regret learning therein. Leveraging self-concordant barrier functions, we first construct a new bandit learning algorithm and show that it achieves the single-agent optimal regret of $tilde{Theta}(nsqrt{T})$ under smooth and strongly concave reward functions ($n geq 1$ is the problem dimension). We then show that if each player applies this no-regret learning algorithm in strongly monotone games, the joint action converges in the textit{last iterate} to the unique Nash equilibrium at a rate of $tilde{Theta}(nT^{-1/2})$. Prior to our work, the best-known convergence rate in the same class of games is $tilde{O}(n^{2/3}T^{-1/3})$ (achieved by a different algorithm), thus leaving open the problem of optimal no-regret learning algorithms (since the known lower bound is $Omega(nT^{-1/2})$). Our results thus settle this open problem and contribute to the broad landscape of bandit game-theoretical learning by identifying the first doubly optimal bandit learning algorithm, in that it achieves (up to log factors) both optimal regret in the single-agent learning and optimal last-iterate convergence rate in the multi-agent learning. We also present preliminary numerical results on several application problems to demonstrate the efficacy of our algorithm in terms of iteration count.
4/1/2024