Cooperative Decision-Making for CAVs at Unsignalized Intersections: A MARL Approach with Attention and Hierarchical Game Priors

0
Sign in to get full access
Overview
- This paper proposes a multi-agent reinforcement learning (MARL) approach for cooperative decision-making among connected autonomous vehicles (CAVs) at unsignalized intersections.
- The approach incorporates attention mechanisms and hierarchical game priors to improve the decision-making process.
- The goal is to enable CAVs to navigate unsignalized intersections efficiently and safely without the need for traffic signals.
Plain English Explanation
The paper focuses on the problem of decision-making for connected autonomous vehicles (CAVs) at unsignalized intersections. Unsignalized intersections are road junctions without traffic lights or stop signs, which can be challenging for CAVs to navigate safely and efficiently.
The researchers developed a multi-agent reinforcement learning (MARL) approach to address this challenge. In this approach, each CAV is considered an "agent" that can learn and make decisions independently. The agents use attention mechanisms to focus on the most relevant information when making decisions, and they also incorporate hierarchical game priors to better understand the overall dynamics of the intersection.
The goal of this MARL approach is to enable CAVs to navigate unsignalized intersections safely and efficiently, without the need for traditional traffic signals. This could lead to smoother traffic flow, reduced congestion, and improved energy efficiency for CAVs.
Technical Explanation
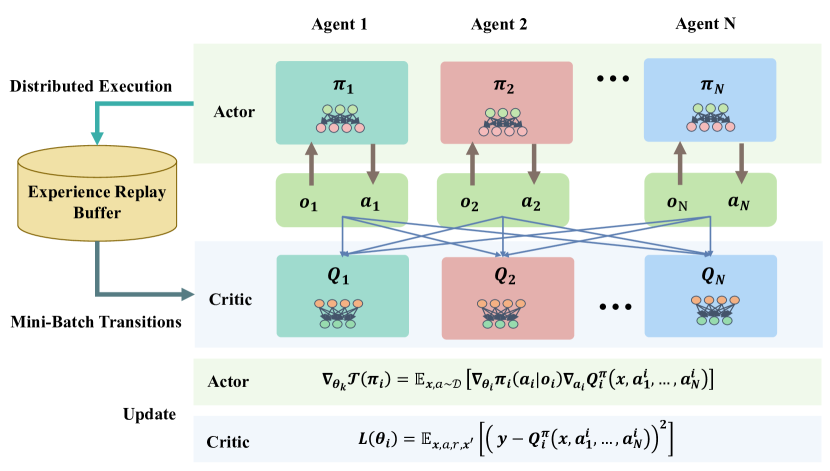
The paper proposes a multi-agent reinforcement learning (MARL) approach for cooperative decision-making among CAVs at unsignalized intersections. The key elements of the approach are:
-
Attention Mechanism: The CAVs use an attention mechanism to focus on the most relevant information when making decisions. This helps them prioritize the most important factors, such as the positions and trajectories of nearby vehicles, in their decision-making process.
-
Hierarchical Game Priors: The CAVs incorporate hierarchical game priors into their decision-making. These priors help the CAVs understand the overall dynamics of the intersection and make more informed decisions based on the expected actions of other vehicles.
-
Cooperative Decision-Making: The CAVs work cooperatively to navigate the intersection, making decisions that consider the well-being of the entire system rather than just their individual interests.
The researchers evaluated the proposed approach through simulation experiments, comparing its performance to other MARL-based approaches and a baseline rule-based strategy. The results demonstrate that the proposed approach can improve the efficiency and safety of CAV navigation at unsignalized intersections.
Critical Analysis
The paper presents a promising approach to addressing the challenge of cooperative decision-making for CAVs at unsignalized intersections. The incorporation of attention mechanisms and hierarchical game priors appears to be a valuable addition to the MARL framework, helping the CAVs make more informed and coordinated decisions.
However, the paper does not address certain limitations and potential issues that could arise in real-world implementation. For example, the simulation experiments may not fully capture the complexity and unpredictability of actual traffic scenarios, and the proposed approach may face challenges in adapting to changing environmental conditions or unexpected events.
Additionally, the paper does not discuss the potential implications of this technology on the broader transportation system and society. For instance, the widespread adoption of CAVs with cooperative decision-making capabilities could have significant impacts on urban planning, infrastructure design, and the overall transportation landscape.
Further research is needed to explore these critical aspects and to investigate the scalability and robustness of the proposed approach in more realistic and diverse traffic scenarios.
Conclusion
This paper presents a multi-agent reinforcement learning (MARL) approach for cooperative decision-making among connected autonomous vehicles (CAVs) at unsignalized intersections. By incorporating attention mechanisms and hierarchical game priors, the proposed approach aims to enable CAVs to navigate unsignalized intersections safely and efficiently, without the need for traditional traffic signals.
The results of the simulation experiments are promising, demonstrating the potential of this approach to improve the overall performance of CAV navigation in complex traffic environments. However, further research is needed to address the limitations and potential issues identified in the critical analysis, as well as to explore the broader implications of this technology on the transportation system and society as a whole.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Cooperative Decision-Making for CAVs at Unsignalized Intersections: A MARL Approach with Attention and Hierarchical Game Priors
Jiaqi Liu, Peng Hang, Xiaoxiang Na, Chao Huang, Jian Sun
The development of autonomous vehicles has shown great potential to enhance the efficiency and safety of transportation systems. However, the decision-making issue in complex human-machine mixed traffic scenarios, such as unsignalized intersections, remains a challenge for autonomous vehicles. While reinforcement learning (RL) has been used to solve complex decision-making problems, existing RL methods still have limitations in dealing with cooperative decision-making of multiple connected autonomous vehicles (CAVs), ensuring safety during exploration, and simulating realistic human driver behaviors. In this paper, a novel and efficient algorithm, Multi-Agent Game-prior Attention Deep Deterministic Policy Gradient (MA-GA-DDPG), is proposed to address these limitations. Our proposed algorithm formulates the decision-making problem of CAVs at unsignalized intersections as a decentralized multi-agent reinforcement learning problem and incorporates an attention mechanism to capture interaction dependencies between ego CAV and other agents. The attention weights between the ego vehicle and other agents are then used to screen interaction objects and obtain prior hierarchical game relations, based on which a safety inspector module is designed to improve the traffic safety. Furthermore, both simulation and hardware-in-the-loop experiments were conducted, demonstrating that our method outperforms other baseline approaches in terms of driving safety, efficiency, and comfort.
Read more9/10/2024
🤿
0
Exploring the impact of traffic signal control and connected and automated vehicles on intersections safety: A deep reinforcement learning approach
Amir Hossein Karbasi, Hao Yang, Saiedeh Razavi
In transportation networks, intersections pose significant risks of collisions due to conflicting movements of vehicles approaching from different directions. To address this issue, various tools can exert influence on traffic safety both directly and indirectly. This study focuses on investigating the impact of adaptive signal control and connected and automated vehicles (CAVs) on intersection safety using a deep reinforcement learning approach. The objective is to assess the individual and combined effects of CAVs and adaptive traffic signal control on traffic safety, considering rear-end and crossing conflicts. The study employs a Deep Q Network (DQN) to regulate traffic signals and driving behaviors of both CAVs and Human Drive Vehicles (HDVs), and uses Time To Collision (TTC) metric to evaluate safety. The findings demonstrate a significant reduction in rear-end and crossing conflicts through the combined implementation of CAVs and DQNs-based traffic signal control. Additionally, the long-term positive effects of CAVs on safety are similar to the short-term effects of combined CAVs and DQNs-based traffic signal control. Overall, the study emphasizes the potential benefits of integrating CAVs and adaptive traffic signal control approaches in order to enhance traffic safety. The findings of this study could provide valuable insights for city officials and transportation authorities in developing effective strategies to improve safety at signalized intersections.
Read more5/30/2024
🏋️
0
Agent-Agnostic Centralized Training for Decentralized Multi-Agent Cooperative Driving
Shengchao Yan, Lukas Konig, Wolfram Burgard
Active traffic management with autonomous vehicles offers the potential for reduced congestion and improved traffic flow. However, developing effective algorithms for real-world scenarios requires overcoming challenges related to infinite-horizon traffic flow and partial observability. To address these issues and further decentralize traffic management, we propose an asymmetric actor-critic model that learns decentralized cooperative driving policies for autonomous vehicles using single-agent reinforcement learning. By employing attention neural networks with masking, our approach efficiently manages real-world traffic dynamics and partial observability, eliminating the need for predefined agents or agent-specific experience buffers in multi-agent reinforcement learning. Extensive evaluations across various traffic scenarios demonstrate our method's significant potential in improving traffic flow at critical bottleneck points. Moreover, we address the challenges posed by conservative autonomous vehicle driving behaviors that adhere strictly to traffic rules, showing that our cooperative policy effectively alleviates potential slowdowns without compromising safety.
Read more9/4/2024

0
Multi-Task Lane-Free Driving Strategy for Connected and Automated Vehicles: A Multi-Agent Deep Reinforcement Learning Approach
Mehran Berahman, Majid Rostami-Shahrbabaki, Klaus Bogenberger
Deep reinforcement learning has shown promise in various engineering applications, including vehicular traffic control. The non-stationary nature of traffic, especially in the lane-free environment with more degrees of freedom in vehicle behaviors, poses challenges for decision-making since a wrong action might lead to a catastrophic failure. In this paper, we propose a novel driving strategy for Connected and Automated Vehicles (CAVs) based on a competitive Multi-Agent Deep Deterministic Policy Gradient approach. The developed multi-agent deep reinforcement learning algorithm creates a dynamic and non-stationary scenario, mirroring real-world traffic complexities and making trained agents more robust. The algorithm's reward function is strategically and uniquely formulated to cover multiple vehicle control tasks, including maintaining desired speeds, overtaking, collision avoidance, and merging and diverging maneuvers. Moreover, additional considerations for both lateral and longitudinal passenger comfort and safety criteria are taken into account. We employed inter-vehicle forces, known as nudging and repulsive forces, to manage the maneuvers of CAVs in a lane-free traffic environment. The proposed driving algorithm is trained and evaluated on lane-free roads using the Simulation of Urban Mobility platform. Experimental results demonstrate the algorithm's efficacy in handling different objectives, highlighting its potential to enhance safety and efficiency in autonomous driving within lane-free traffic environments.
Read more6/24/2024