Agent-Agnostic Centralized Training for Decentralized Multi-Agent Cooperative Driving

0
🏋️
Sign in to get full access
Overview
- Autonomous vehicles (AVs) have the potential to reduce traffic congestion and improve flow
- However, developing effective algorithms for real-world scenarios is challenging due to:
- Infinite-horizon traffic flow
- Partial observability
- To address these issues and decentralize traffic management, the researchers propose an asymmetric actor-critic model
Plain English Explanation
The paper explores how autonomous vehicles could be used to actively manage traffic and reduce congestion. Autonomous vehicles have the ability to communicate with each other and respond dynamically to traffic conditions, which could lead to more efficient traffic flow.
However, the researchers explain that there are some significant challenges to developing effective traffic management algorithms for real-world scenarios. One challenge is that traffic flow is complex and can be thought of as an "infinite-horizon" problem, meaning the system needs to consider the long-term implications of actions rather than just optimizing for the immediate situation. Another challenge is that autonomous vehicles may only have partial information about the overall traffic conditions, making it difficult to coordinate their actions.
To address these challenges, the researchers propose using a type of reinforcement learning approach called an "asymmetric actor-critic model." This model allows each autonomous vehicle to learn its own driving policy through trial-and-error, without needing to share detailed information with other vehicles. By using attention neural networks, the model can efficiently handle the complex, partially-observed traffic dynamics.
The key idea is to give each autonomous vehicle the ability to cooperate with others to improve overall traffic flow, without relying on a centralized traffic management system. This decentralized approach could be more scalable and robust than traditional methods.
Technical Explanation
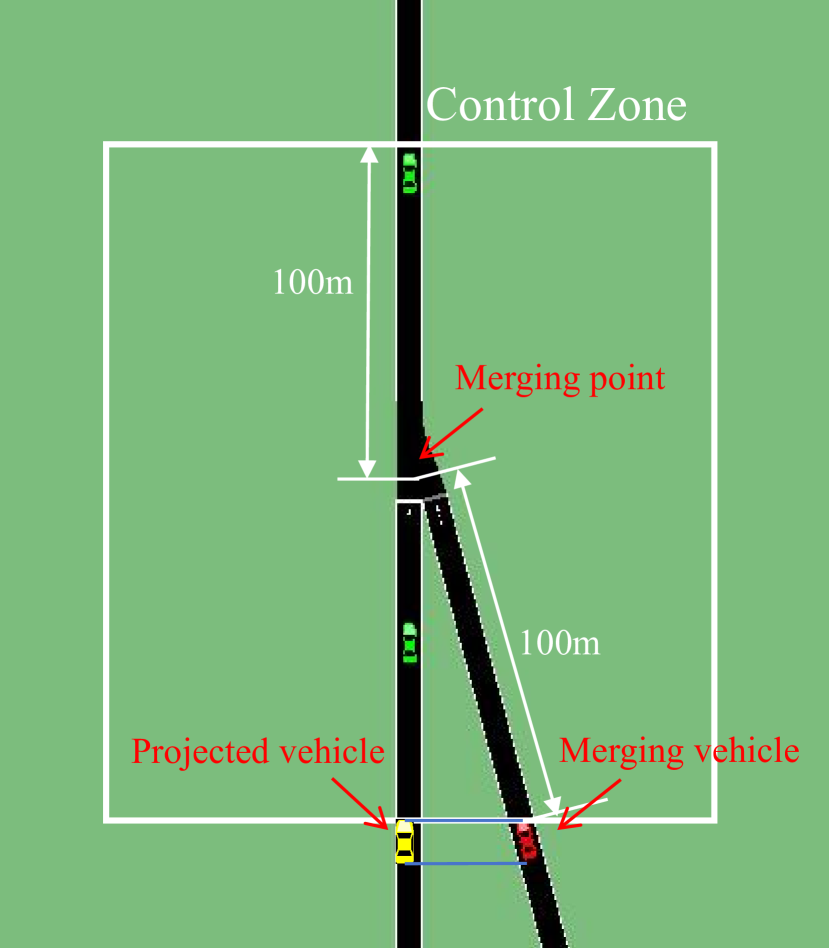
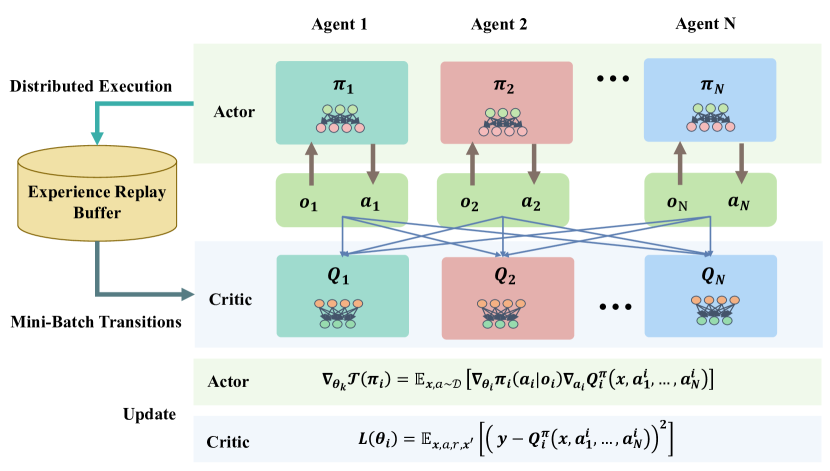
The researchers propose an asymmetric actor-critic model to enable decentralized cooperative driving policies for autonomous vehicles using single-agent reinforcement learning. This approach addresses the challenges of infinite-horizon traffic flow and partial observability that arise in real-world traffic scenarios.
The asymmetric actor-critic model employs attention neural networks with masking to efficiently manage the complex, partially-observed traffic dynamics. This eliminates the need for predefined agents or agent-specific experience buffers that are commonly used in multi-agent reinforcement learning approaches.
The researchers evaluate their method across various traffic scenarios and find that it has significant potential in improving traffic flow at critical bottleneck points. Importantly, the method also addresses the challenge of conservative autonomous vehicle driving behaviors, demonstrating that the cooperative policy can effectively alleviate potential slowdowns without compromising safety.
Critical Analysis
The paper presents a novel approach to decentralized traffic management using autonomous vehicles, which is an important problem to address as autonomous vehicles become more prevalent. The researchers have identified key challenges related to infinite-horizon traffic flow and partial observability, and their asymmetric actor-critic model with attention neural networks appears to be a promising solution.
However, the paper does not provide a detailed discussion of the limitations or potential issues with the proposed approach. For example, it would be valuable to understand how the model performs in more complex, real-world traffic scenarios with a greater number of vehicles and more complex traffic patterns. Additionally, the paper does not address the challenges of coordinating autonomous vehicles with human-driven vehicles, which will be a critical issue in the near-term as autonomous vehicles are gradually integrated into the transportation system.
Further research could also explore the scalability of the decentralized approach, as well as the potential for learning cooperative driving behaviors that go beyond simply optimizing for traffic flow and consider other factors like energy efficiency, emissions, or passenger comfort.
Conclusion
This paper presents an innovative approach to active traffic management using autonomous vehicles and reinforcement learning. By employing an asymmetric actor-critic model with attention neural networks, the researchers have developed a decentralized cooperative driving policy that can effectively manage complex, partially-observed traffic dynamics.
The results demonstrate the significant potential of this approach in improving traffic flow at critical bottleneck points, while also addressing the challenge of conservative autonomous vehicle driving behaviors. As autonomous vehicles become more prevalent, this type of decentralized, cooperative traffic management strategy could play a key role in reducing congestion and improving the efficiency of transportation systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏋️
0
Agent-Agnostic Centralized Training for Decentralized Multi-Agent Cooperative Driving
Shengchao Yan, Lukas Konig, Wolfram Burgard
Active traffic management with autonomous vehicles offers the potential for reduced congestion and improved traffic flow. However, developing effective algorithms for real-world scenarios requires overcoming challenges related to infinite-horizon traffic flow and partial observability. To address these issues and further decentralize traffic management, we propose an asymmetric actor-critic model that learns decentralized cooperative driving policies for autonomous vehicles using single-agent reinforcement learning. By employing attention neural networks with masking, our approach efficiently manages real-world traffic dynamics and partial observability, eliminating the need for predefined agents or agent-specific experience buffers in multi-agent reinforcement learning. Extensive evaluations across various traffic scenarios demonstrate our method's significant potential in improving traffic flow at critical bottleneck points. Moreover, we address the challenges posed by conservative autonomous vehicle driving behaviors that adhere strictly to traffic rules, showing that our cooperative policy effectively alleviates potential slowdowns without compromising safety.
Read more9/4/2024

0
Multi-Task Lane-Free Driving Strategy for Connected and Automated Vehicles: A Multi-Agent Deep Reinforcement Learning Approach
Mehran Berahman, Majid Rostami-Shahrbabaki, Klaus Bogenberger
Deep reinforcement learning has shown promise in various engineering applications, including vehicular traffic control. The non-stationary nature of traffic, especially in the lane-free environment with more degrees of freedom in vehicle behaviors, poses challenges for decision-making since a wrong action might lead to a catastrophic failure. In this paper, we propose a novel driving strategy for Connected and Automated Vehicles (CAVs) based on a competitive Multi-Agent Deep Deterministic Policy Gradient approach. The developed multi-agent deep reinforcement learning algorithm creates a dynamic and non-stationary scenario, mirroring real-world traffic complexities and making trained agents more robust. The algorithm's reward function is strategically and uniquely formulated to cover multiple vehicle control tasks, including maintaining desired speeds, overtaking, collision avoidance, and merging and diverging maneuvers. Moreover, additional considerations for both lateral and longitudinal passenger comfort and safety criteria are taken into account. We employed inter-vehicle forces, known as nudging and repulsive forces, to manage the maneuvers of CAVs in a lane-free traffic environment. The proposed driving algorithm is trained and evaluated on lane-free roads using the Simulation of Urban Mobility platform. Experimental results demonstrate the algorithm's efficacy in handling different objectives, highlighting its potential to enhance safety and efficiency in autonomous driving within lane-free traffic environments.
Read more6/24/2024
0
Autonomous vehicle decision and control through reinforcement learning with traffic flow randomization
Yuan Lin, Antai Xie, Xiao Liu
Most of the current studies on autonomous vehicle decision-making and control tasks based on reinforcement learning are conducted in simulated environments. The training and testing of these studies are carried out under rule-based microscopic traffic flow, with little consideration of migrating them to real or near-real environments to test their performance. It may lead to a degradation in performance when the trained model is tested in more realistic traffic scenes. In this study, we propose a method to randomize the driving style and behavior of surrounding vehicles by randomizing certain parameters of the car-following model and the lane-changing model of rule-based microscopic traffic flow in SUMO. We trained policies with deep reinforcement learning algorithms under the domain randomized rule-based microscopic traffic flow in freeway and merging scenes, and then tested them separately in rule-based microscopic traffic flow and high-fidelity microscopic traffic flow. Results indicate that the policy trained under domain randomization traffic flow has significantly better success rate and calculative reward compared to the models trained under other microscopic traffic flows.
Read more4/22/2024
0
Cooperative Decision-Making for CAVs at Unsignalized Intersections: A MARL Approach with Attention and Hierarchical Game Priors
Jiaqi Liu, Peng Hang, Xiaoxiang Na, Chao Huang, Jian Sun
The development of autonomous vehicles has shown great potential to enhance the efficiency and safety of transportation systems. However, the decision-making issue in complex human-machine mixed traffic scenarios, such as unsignalized intersections, remains a challenge for autonomous vehicles. While reinforcement learning (RL) has been used to solve complex decision-making problems, existing RL methods still have limitations in dealing with cooperative decision-making of multiple connected autonomous vehicles (CAVs), ensuring safety during exploration, and simulating realistic human driver behaviors. In this paper, a novel and efficient algorithm, Multi-Agent Game-prior Attention Deep Deterministic Policy Gradient (MA-GA-DDPG), is proposed to address these limitations. Our proposed algorithm formulates the decision-making problem of CAVs at unsignalized intersections as a decentralized multi-agent reinforcement learning problem and incorporates an attention mechanism to capture interaction dependencies between ego CAV and other agents. The attention weights between the ego vehicle and other agents are then used to screen interaction objects and obtain prior hierarchical game relations, based on which a safety inspector module is designed to improve the traffic safety. Furthermore, both simulation and hardware-in-the-loop experiments were conducted, demonstrating that our method outperforms other baseline approaches in terms of driving safety, efficiency, and comfort.
Read more9/10/2024