Cooperative Task Execution in Multi-Agent Systems
2403.04370
0
0
Abstract
We propose a multi-agent system that enables groups of agents to collaborate and work autonomously to execute tasks. Groups can work in a decentralized manner and can adapt to dynamic changes in the environment. Groups of agents solve assigned tasks by exploring the solution space cooperatively based on the highest reward first. The tasks have a dependency structure associated with them. We rigorously evaluated the performance of the system and the individual group performance using centralized and decentralized control approaches for task distribution. Based on the results, the centralized approach is more efficient for systems with a less-dependent system $G_{18}$ (a well-known program graph that contains $18$ nodes with few links), while the decentralized approach performs better for systems with a highly-dependent system $G_{40}$ (a program graph that contains $40$ highly interlinked nodes). We also evaluated task allocation to groups that do not have interdependence. Our findings reveal that there was significantly less difference in the number of tasks allocated to each group in a less-dependent system than in a highly-dependent one. The experimental results showed that a large number of small-size cooperative groups of agents unequivocally improved the system's performance compared to a small number of large-size cooperative groups of agents. Therefore, it is essential to identify the optimal group size for a system to enhance its performance.
Create account to get full access
Overview
- The research paper discusses a Cooperative Execution Strategy (CES) for coordinating task execution among a group of cooperative agents in a multi-agent system.
- The CES aims to improve the efficiency and effectiveness of task execution by leveraging the capabilities and resources of multiple agents working together.
- The paper presents the system design, task dependencies, and coordination mechanisms for the CES.
- Experimental results are provided to demonstrate the performance of the CES compared to other approaches.
Plain English Explanation
The paper looks at how a group of digital "agents" can work together to complete tasks more efficiently. In a multi-agent system, there may be several agents with different skills and resources. The Cooperative Execution Strategy (CES) proposed in this research is a way for these agents to coordinate and collaborate on tasks, rather than each agent trying to do everything on their own.
The key idea is that by sharing information and coordinating their actions, the agents can divide up the work in an optimal way and leverage each other's strengths. This can lead to faster task completion, better use of resources, and overall higher efficiency compared to having each agent work in isolation.
The paper explains how the CES system is designed, including how it tracks dependencies between different tasks and how the agents communicate and make decisions together. The researchers also present experimental results showing that the CES outperforms other approaches for multi-agent task coordination.
This research contributes to the broader field of multi-agent systems, which explores how groups of autonomous agents can work together to solve complex problems. By developing effective coordination strategies like the CES, researchers aim to unlock the potential of multi-agent systems for a wide range of applications, from robotics and logistics to automated computer games and beyond.
Technical Explanation
The Cooperative Execution Strategy (CES) proposed in this paper is a coordination mechanism designed to improve the efficiency of task execution in a multi-agent system. The key elements of the CES include:
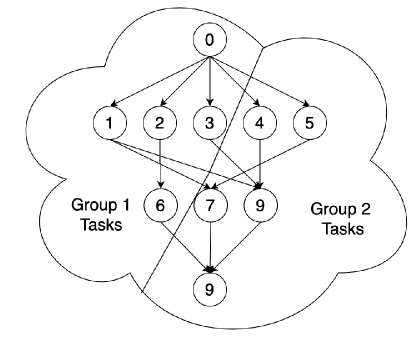
- Task Dependencies: The CES models the relationships and dependencies between different tasks, allowing agents to understand how their actions affect the overall workflow.
- Information Sharing: Agents in the CES share relevant information about their capabilities, resources, and task progress to enable better coordination.
- Decision-Making: The CES employs a decentralized decision-making process, where agents collectively decide on the optimal assignment and execution of tasks.
- Task Allocation: The CES dynamically allocates tasks to agents based on their capabilities and the current state of the system, aiming to maximize overall efficiency.
The researchers conducted experiments to evaluate the performance of the CES in comparison to other multi-agent coordination approaches, such as multi-agent synchronization and group-aware coordination. The results demonstrate that the CES outperforms these alternative methods in terms of task completion time, resource utilization, and overall system efficiency.
Critical Analysis
The research presented in this paper makes a valuable contribution to the field of cooperative multi-agent systems. The CES provides a robust and flexible coordination mechanism that can be applied to a wide range of multi-agent scenarios.
One potential limitation of the CES is the assumption of fully cooperative agents. In real-world situations, there may be instances where agents have conflicting goals or priorities, which could complicate the coordination process. The paper does not address how the CES might handle such situations.
Additionally, the paper focuses on a relatively simple task execution scenario. It would be interesting to see how the CES performs in more complex, dynamic, and uncertain environments, where agents may need to adapt to changing conditions and unexpected events.
Further research could also explore the scalability of the CES as the number of agents and tasks increases, as well as the potential for incorporating learning and adaptation mechanisms to enhance the system's resilience and flexibility over time.
Conclusion
The Cooperative Execution Strategy (CES) presented in this paper offers a promising approach for coordinating task execution in multi-agent systems. By leveraging the capabilities and resources of multiple cooperative agents, the CES can improve the efficiency and effectiveness of task completion.
The experimental results demonstrate the advantages of the CES over alternative coordination methods, making it a valuable contribution to the field of multi-agent systems. However, further research is needed to address potential limitations and explore the applicability of the CES in more complex and dynamic scenarios.
As the field of multi-agent systems continues to evolve, strategies like the CES will play an increasingly important role in unlocking the potential of collaborative problem-solving and task execution across a wide range of applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Cooperative Multi-agent Approach for Automated Computer Game Testing
Samira Shirzadeh-hajimahmood, I. S. W. B. Prasteya, Mehdi Dastani, Frank Dignum
0
0
Automated testing of computer games is a challenging problem, especially when lengthy scenarios have to be tested. Automating such a scenario boils down to finding the right sequence of interactions given an abstract description of the scenario. Recent works have shown that an agent-based approach works well for the purpose, e.g. due to agents' reactivity, hence enabling a test agent to immediately react to game events and changing state. Many games nowadays are multi-player. This opens up an interesting possibility to deploy multiple cooperative test agents to test such a game, for example to speed up the execution of multiple testing tasks. This paper offers a cooperative multi-agent testing approach and a study of its performance based on a case study on a 3D game called Lab Recruits.
5/21/2024
🔎
Distributed and Decentralized Control and Task Allocation for Flexible Swarms
Yigal Koifman, Ariel Barel, Alfred M. Bruckstein
0
0
This paper introduces a novel bio-mimetic approach for distributed control of robotic swarms, inspired by the collective behaviors of swarms in nature such as schools of fish and flocks of birds. The agents are assumed to have limited sensory perception, lack memory, be Identical, anonymous, and operate without interagent explicit communication. Despite these limitations, we demonstrate that collaborative exploration and task allocation can be executed by applying simple local rules of interactions between the agents. A comprehensive model comprised of agent, formation, and swarm layers is proposed in this paper, where each layer performs a specific function in shaping the swarm's collective behavior, thereby contributing to the emergence of the anticipated behaviors. We consider four principles combined in the design of the distributed control process: Cohesiveness, Flexibility, Attraction-Repulsion, and Peristaltic Motion. We design the control algorithms as reactive behaviour that enables the swarm to maintain connectivity, adapt to dynamic environments, spread out and cover a region with a size determined by the number of agents, and respond to various local task requirements. We explore some simple broadcast control-based steering methods, that result in inducing anonymous ad-hoc leaders among the agents, capable of guiding the swarm towards yet unexplored regions with further tasks. Our analysis is complemented by simulations, validating the efficacy of our algorithms. The experiments with various scenarios showcase the swarm`s capability to self-organize and perform tasks effectively under the proposed framework. The possible implementations include domains that necessitate emergent coordination and control in multi-agent systems, without the need for advanced individual abilities or direct communication.
5/24/2024
🤯
Emergence of Collective Open-Ended Exploration from Decentralized Meta-Reinforcement Learning
Richard Bornemann, Gautier Hamon, Eleni Nisioti, Cl'ement Moulin-Frier
0
0
Recent works have proven that intricate cooperative behaviors can emerge in agents trained using meta reinforcement learning on open ended task distributions using self-play. While the results are impressive, we argue that self-play and other centralized training techniques do not accurately reflect how general collective exploration strategies emerge in the natural world: through decentralized training and over an open-ended distribution of tasks. In this work we therefore investigate the emergence of collective exploration strategies, where several agents meta-learn independent recurrent policies on an open ended distribution of tasks. To this end we introduce a novel environment with an open ended procedurally generated task space which dynamically combines multiple subtasks sampled from five diverse task types to form a vast distribution of task trees. We show that decentralized agents trained in our environment exhibit strong generalization abilities when confronted with novel objects at test time. Additionally, despite never being forced to cooperate during training the agents learn collective exploration strategies which allow them to solve novel tasks never encountered during training. We further find that the agents learned collective exploration strategies extend to an open ended task setting, allowing them to solve task trees of twice the depth compared to the ones seen during training. Our open source code as well as videos of the agents can be found on our companion website.
5/8/2024

Multi-Agent Synchronization Tasks
Rolando Fernandez, Garrett Warnell, Derrik E. Asher, Peter Stone
0
0
In multi-agent reinforcement learning (MARL), coordination plays a crucial role in enhancing agents' performance beyond what they could achieve through cooperation alone. The interdependence of agents' actions, coupled with the need for communication, leads to a domain where effective coordination is crucial. In this paper, we introduce and define $textit{Multi-Agent Synchronization Tasks}$ (MSTs), a novel subset of multi-agent tasks. We describe one MST, that we call $textit{Synchronized Predator-Prey}$, offering a detailed description that will serve as the basis for evaluating a selection of recent state-of-the-art (SOTA) MARL algorithms explicitly designed to address coordination challenges through the use of communication strategies. Furthermore, we present empirical evidence that reveals the limitations of the algorithms assessed to solve MSTs, demonstrating their inability to scale effectively beyond 2-agent coordination tasks in scenarios where communication is a requisite component. Finally, the results raise questions about the applicability of recent SOTA approaches for complex coordination tasks (i.e. MSTs) and prompt further exploration into the underlying causes of their limitations in this context.
4/30/2024