Cooptimizing Safety and Performance with a Control-Constrained Formulation

0

Sign in to get full access
Overview
- The research paper proposes a control-constrained formulation to co-optimize safety and performance in autonomous systems.
- It develops a mathematical framework that can balance objectives like minimizing cost and maintaining safety constraints.
- The approach is demonstrated through experiments on spacecraft trajectory optimization and robot navigation tasks.
Plain English Explanation
The paper introduces a new way to design autonomous systems, like self-driving cars or spacecraft, that need to balance multiple competing goals. On one hand, these systems should perform their tasks efficiently and effectively. But on the other hand, they also need to operate safely and avoid dangerous situations.
The researchers developed a mathematical framework that can handle this tradeoff. Their control-constrained formulation allows the system to optimize for high performance, while also enforcing strict safety constraints. This means the system will try to choose actions that minimize costs or maximize rewards, but only if those actions are guaranteed to keep the system within safe operating limits.
The paper demonstrates this approach through two example applications: spacecraft trajectory optimization and robot navigation. In the spacecraft example, the system plans fuel-efficient maneuvers while ensuring the spacecraft stays a safe distance from obstacles. For the robots, the system plans paths that maximize efficiency, but that also keep the robots a safe distance from walls or other obstacles.
The key idea is to jointly optimize for both performance and safety, rather than treating them as separate, competing objectives. This allows the autonomous systems to achieve high levels of both efficiency and safety, which is critical for real-world applications.
Technical Explanation
The paper introduces a control-constrained formulation for co-optimizing safety and performance in autonomous systems. The formulation casts the problem as a constrained optimization, where the objective function represents performance (e.g. minimizing cost or maximizing reward), and the constraints represent safety requirements (e.g. maintaining safe distances from obstacles).
This approach differs from traditional methods that treat safety and performance as separate objectives to be balanced. Instead, the control-constrained formulation allows the system to optimize performance while strictly enforcing safety constraints. The authors prove that this formulation leads to solutions that are Pareto-optimal with respect to the original multi-objective problem.
The paper demonstrates the effectiveness of this approach through two case studies: spacecraft trajectory optimization and robot navigation. In the spacecraft case, the system plans fuel-efficient maneuvers while ensuring safe distances from obstacles. For the robots, the system plans efficient paths while maintaining safe distances from walls and other obstacles.
Critical Analysis
The paper makes a compelling case for the benefits of the control-constrained formulation, showing how it can balance safety and performance objectives better than traditional multi-objective approaches. However, the analysis is limited to simulation-based experiments, and the authors note the need for further validation on real-world systems.
Additionally, the paper does not delve deeply into the computational complexity of solving the control-constrained optimization problem, which could be a practical limitation for real-time deployment. Further research may be needed to develop efficient optimization algorithms or approximation techniques to make the approach scalable.
Finally, the paper focuses on relatively simple safety constraints, such as maintaining safe distances from obstacles. More complex safety requirements, such as those involving logical constraints or partial observability, may require extensions to the proposed framework.
Conclusion
This paper introduces an innovative control-constrained formulation that can co-optimize safety and performance in autonomous systems. By casting the problem as a constrained optimization, the approach ensures that high-performing solutions also satisfy strict safety requirements. The demonstrated case studies on spacecraft and robot navigation suggest the potential for this framework to enable a new generation of autonomous systems that can operate reliably and efficiently in the real world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Cooptimizing Safety and Performance with a Control-Constrained Formulation
Hao Wang, Adityaya Dhande, Somil Bansal
Autonomous systems have witnessed a rapid increase in their capabilities, but it remains a challenge for them to perform tasks both effectively and safely. The fact that performance and safety can sometimes be competing objectives renders the cooptimization between them difficult. One school of thought is to treat this cooptimization as a constrained optimal control problem with a performance-oriented objective function and safety as a constraint. However, solving this constrained optimal control problem for general nonlinear systems remains challenging. In this work, we use the general framework of constrained optimal control, but given the safety state constraint, we convert it into an equivalent control constraint, resulting in a state and time-dependent control-constrained optimal control problem. This equivalent optimal control problem can readily be solved using the dynamic programming principle. We show the corresponding value function is a viscosity solution of a certain Hamilton-Jacobi-Bellman Partial Differential Equation (HJB-PDE). Furthermore, we demonstrate the effectiveness of our method with a two-dimensional case study, and the experiment shows that the controller synthesized using our method consistently outperforms the baselines, both in safety and performance.
Read more9/11/2024
0
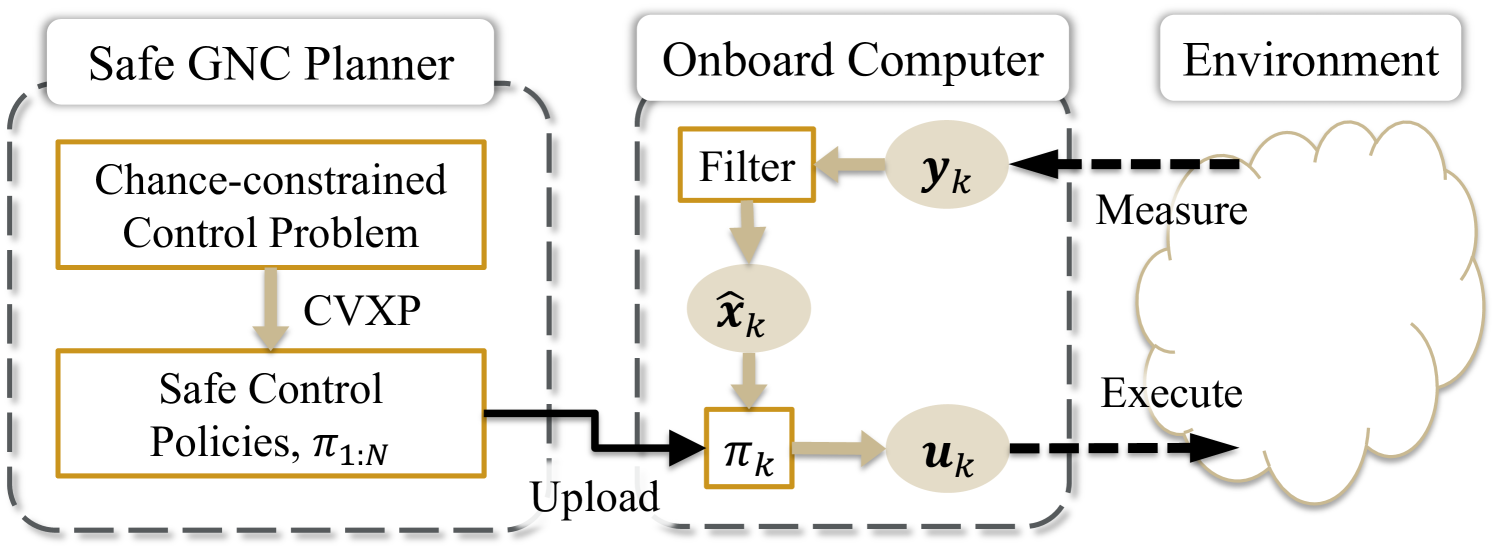
Chance-Constrained Control for Safe Spacecraft Autonomy: Convex Programming Approach
Kenshiro Oguri
This paper presents a robust path-planning framework for safe spacecraft autonomy under uncertainty and develops a computationally tractable formulation based on convex programming. We utilize chance-constrained control to formulate the problem. It provides a mathematical framework to solve for a sequence of control policies that minimizes a probabilistic cost under probabilistic constraints with a user-defined confidence level (e.g., safety with 99.9% confidence). The framework enables the planner to directly control state distributions under operational uncertainties while ensuring the vehicle safety. This paper rigorously formulates the safe autonomy problem, gathers and extends techniques in literature to accommodate key cost/constraint functions that often arise in spacecraft path planning, and develops a tractable solution method. The presented framework is demonstrated via two representative numerical examples: safe autonomous rendezvous and orbit maintenance in cislunar space, both under uncertainties due to navigation error from Kalman filter, execution error via Gates model, and imperfect force models.
Read more4/19/2024
👀
0
Optimal Control of Logically Constrained Partially Observable and Multi-Agent Markov Decision Processes
Krishna C. Kalagarla, Dhruva Kartik, Dongming Shen, Rahul Jain, Ashutosh Nayyar, Pierluigi Nuzzo
Autonomous systems often have logical constraints arising, for example, from safety, operational, or regulatory requirements. Such constraints can be expressed using temporal logic specifications. The system state is often partially observable. Moreover, it could encompass a team of multiple agents with a common objective but disparate information structures and constraints. In this paper, we first introduce an optimal control theory for partially observable Markov decision processes (POMDPs) with finite linear temporal logic constraints. We provide a structured methodology for synthesizing policies that maximize a cumulative reward while ensuring that the probability of satisfying a temporal logic constraint is sufficiently high. Our approach comes with guarantees on approximate reward optimality and constraint satisfaction. We then build on this approach to design an optimal control framework for logically constrained multi-agent settings with information asymmetry. We illustrate the effectiveness of our approach by implementing it on several case studies.
Read more6/21/2024

0
Receding-Constraint Model Predictive Control using a Learned Approximate Control-Invariant Set
Gianni Lunardi, Asia La Rocca, Matteo Saveriano, Andrea Del Prete
In recent years, advanced model-based and data-driven control methods are unlocking the potential of complex robotics systems, and we can expect this trend to continue at an exponential rate in the near future. However, ensuring safety with these advanced control methods remains a challenge. A well-known tool to make controllers (either Model Predictive Controllers or Reinforcement Learning policies) safe, is the so-called control-invariant set (a.k.a. safe set). Unfortunately, for nonlinear systems, such a set cannot be exactly computed in general. Numerical algorithms exist for computing approximate control-invariant sets, but classic theoretic control methods break down if the set is not exact. This paper presents our recent efforts to address this issue. We present a novel Model Predictive Control scheme that can guarantee recursive feasibility and/or safety under weaker assumptions than classic methods. In particular, recursive feasibility is guaranteed by making the safe-set constraint move backward over the horizon, and assuming that such set satisfies a condition that is weaker than control invariance. Safety is instead guaranteed under an even weaker assumption on the safe set, triggering a safe task-abortion strategy whenever a risk of constraint violation is detected. We evaluated our approach on a simulated robot manipulator, empirically demonstrating that it leads to less constraint violations than state-of-the-art approaches, while retaining reasonable performance in terms of tracking cost, number of completed tasks, and computation time.
Read more8/29/2024