CoR-GS: Sparse-View 3D Gaussian Splatting via Co-Regularization

0

Sign in to get full access
Overview
• This paper introduces a new approach called CoR-GS for sparse-view 3D Gaussian splatting, which aims to enable high-quality novel view synthesis from just a few input images. • The key ideas are to leverage co-regularization between the 3D radiance field and the Gaussian splatting representation, as well as a new loss function that encourages plausible 3D structure. • The proposed method shows promising results for few-shot novel view synthesis tasks, outperforming prior work on SRGS, SC-GS, and ABSGS.
Plain English Explanation
The paper introduces a new technique called CoR-GS that can generate high-quality 3D views from just a few input images. The key ideas are:
-
Co-Regularization: The method jointly optimizes the 3D radiance field (the underlying 3D representation) and the Gaussian splatting representation (the rendered output) to ensure they are consistent with each other.
-
Novel Loss Function: CoR-GS uses a new loss function that encourages the 3D representation to have plausible structure, helping it generalize better to novel views.
This allows CoR-GS to produce compelling 3D views from sparse input data, outperforming previous methods like SRGS, SC-GS, and ABSGS that also aim to generate 3D content from limited views.
Technical Explanation
The core of the CoR-GS approach is to jointly optimize the 3D radiance field and the Gaussian splatting representation through co-regularization. The radiance field is a continuous 3D function that encodes the color and density at each point in space, while the Gaussian splatting represents the final rendered output as a collection of 3D Gaussian primitives.
By enforcing consistency between these two representations, the method ensures the final 3D output faithfully reflects the underlying scene structure, even when only a few input views are available. This is achieved through a new loss function that combines terms for reconstruction accuracy, as well as regularization to encourage plausible 3D geometry.
The authors demonstrate the effectiveness of CoR-GS on several few-shot novel view synthesis benchmarks, showing improved performance over prior work like SRGS, SC-GS, and ABSGS. The method is able to generate high-quality 3D renderings from just a handful of input views, a challenging task that has important applications in areas like AR/VR, robotics, and visual effects.
Critical Analysis
The paper presents a promising new approach for sparse-view 3D synthesis, but there are a few potential limitations and areas for further research:
-
Computational Efficiency: While the co-regularization technique helps improve quality, it may come at the cost of increased computational complexity compared to simpler 3D reconstruction methods. The authors do not provide detailed runtime analysis or comparisons.
-
Generalization Ability: The experiments focus on a limited set of synthetic and real-world datasets. It's unclear how well the method would generalize to more diverse and challenging real-world scenes, especially those with complex geometry and materials.
-
Interpretability: The co-regularization objective and new loss function are not fully intuitive. Further work could explore more interpretable formulations that better explain the underlying 3D representation learned by the model.
-
User Control: Unlike SC-GS, CoR-GS does not provide mechanisms for user-guided editing of the 3D content. Incorporating such capabilities could expand the practical applications of the method.
Despite these potential limitations, CoR-GS represents an interesting advance in sparse-view 3D synthesis, and the ideas of co-regularization and structurally-aware loss functions are worth further exploration.
Conclusion
The CoR-GS paper introduces a novel approach for generating high-quality 3D content from just a few input images. By co-regularizing the underlying radiance field and Gaussian splatting representation, and using a new loss function that encourages plausible 3D structure, the method is able to outperform prior work on few-shot novel view synthesis tasks.
While there are some potential limitations around computational efficiency and interpretability, the core ideas behind CoR-GS are promising and could have significant impact on applications requiring 3D reconstruction and visualization from limited data, such as AR/VR, robotics, and visual effects.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
CoR-GS: Sparse-View 3D Gaussian Splatting via Co-Regularization
Jiawei Zhang, Jiahe Li, Xiaohan Yu, Lei Huang, Lin Gu, Jin Zheng, Xiao Bai
3D Gaussian Splatting (3DGS) creates a radiance field consisting of 3D Gaussians to represent a scene. With sparse training views, 3DGS easily suffers from overfitting, negatively impacting rendering. This paper introduces a new co-regularization perspective for improving sparse-view 3DGS. When training two 3D Gaussian radiance fields, we observe that the two radiance fields exhibit point disagreement and rendering disagreement that can unsupervisedly predict reconstruction quality, stemming from the randomness of densification implementation. We further quantify the two disagreements and demonstrate the negative correlation between them and accurate reconstruction, which allows us to identify inaccurate reconstruction without accessing ground-truth information. Based on the study, we propose CoR-GS, which identifies and suppresses inaccurate reconstruction based on the two disagreements: (1) Co-pruning considers Gaussians that exhibit high point disagreement in inaccurate positions and prunes them. (2) Pseudo-view co-regularization considers pixels that exhibit high rendering disagreement are inaccurate and suppress the disagreement. Results on LLFF, Mip-NeRF360, DTU, and Blender demonstrate that CoR-GS effectively regularizes the scene geometry, reconstructs the compact representations, and achieves state-of-the-art novel view synthesis quality under sparse training views.
Read more7/12/2024
0
SparseGS: Real-Time 360{deg} Sparse View Synthesis using Gaussian Splatting
Haolin Xiong, Sairisheek Muttukuru, Rishi Upadhyay, Pradyumna Chari, Achuta Kadambi
The problem of novel view synthesis has grown significantly in popularity recently with the introduction of Neural Radiance Fields (NeRFs) and other implicit scene representation methods. A recent advance, 3D Gaussian Splatting (3DGS), leverages an explicit representation to achieve real-time rendering with high-quality results. However, 3DGS still requires an abundance of training views to generate a coherent scene representation. In few shot settings, similar to NeRF, 3DGS tends to overfit to training views, causing background collapse and excessive floaters, especially as the number of training views are reduced. We propose a method to enable training coherent 3DGS-based radiance fields of 360-degree scenes from sparse training views. We integrate depth priors with generative and explicit constraints to reduce background collapse, remove floaters, and enhance consistency from unseen viewpoints. Experiments show that our method outperforms base 3DGS by 6.4% in LPIPS and by 12.2% in PSNR, and NeRF-based methods by at least 17.6% in LPIPS on the MipNeRF-360 dataset with substantially less training and inference cost.
Read more5/14/2024

0
Optimizing 3D Gaussian Splatting for Sparse Viewpoint Scene Reconstruction
Shen Chen, Jiale Zhou, Lei Li
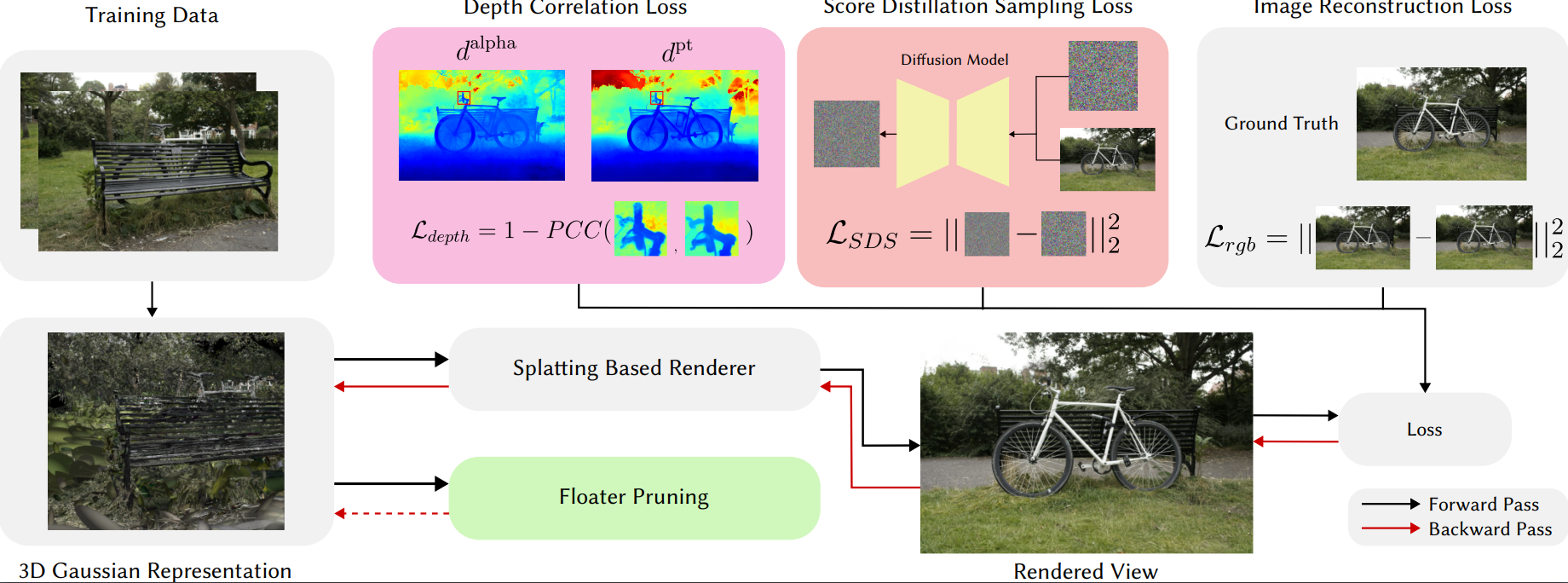
3D Gaussian Splatting (3DGS) has emerged as a promising approach for 3D scene representation, offering a reduction in computational overhead compared to Neural Radiance Fields (NeRF). However, 3DGS is susceptible to high-frequency artifacts and demonstrates suboptimal performance under sparse viewpoint conditions, thereby limiting its applicability in robotics and computer vision. To address these limitations, we introduce SVS-GS, a novel framework for Sparse Viewpoint Scene reconstruction that integrates a 3D Gaussian smoothing filter to suppress artifacts. Furthermore, our approach incorporates a Depth Gradient Profile Prior (DGPP) loss with a dynamic depth mask to sharpen edges and 2D diffusion with Score Distillation Sampling (SDS) loss to enhance geometric consistency in novel view synthesis. Experimental evaluations on the MipNeRF-360 and SeaThru-NeRF datasets demonstrate that SVS-GS markedly improves 3D reconstruction from sparse viewpoints, offering a robust and efficient solution for scene understanding in robotics and computer vision applications.
Read more9/6/2024

0
LoopSparseGS: Loop Based Sparse-View Friendly Gaussian Splatting
Zhenyu Bao, Guibiao Liao, Kaichen Zhou, Kanglin Liu, Qing Li, Guoping Qiu
Despite the photorealistic novel view synthesis (NVS) performance achieved by the original 3D Gaussian splatting (3DGS), its rendering quality significantly degrades with sparse input views. This performance drop is mainly caused by the limited number of initial points generated from the sparse input, insufficient supervision during the training process, and inadequate regularization of the oversized Gaussian ellipsoids. To handle these issues, we propose the LoopSparseGS, a loop-based 3DGS framework for the sparse novel view synthesis task. In specific, we propose a loop-based Progressive Gaussian Initialization (PGI) strategy that could iteratively densify the initialized point cloud using the rendered pseudo images during the training process. Then, the sparse and reliable depth from the Structure from Motion, and the window-based dense monocular depth are leveraged to provide precise geometric supervision via the proposed Depth-alignment Regularization (DAR). Additionally, we introduce a novel Sparse-friendly Sampling (SFS) strategy to handle oversized Gaussian ellipsoids leading to large pixel errors. Comprehensive experiments on four datasets demonstrate that LoopSparseGS outperforms existing state-of-the-art methods for sparse-input novel view synthesis, across indoor, outdoor, and object-level scenes with various image resolutions.
Read more8/2/2024