LoopSparseGS: Loop Based Sparse-View Friendly Gaussian Splatting

0

Sign in to get full access
Overview
- Introduces a novel approach called "LoopSparseGS" for efficient Gaussian splatting in sparse-view 3D reconstruction
- Key ideas include loop-based operations and an attention mechanism to handle sparse input views
- Aims to enable high-quality, real-time 3D reconstruction from limited input views
Plain English Explanation
LoopSparseGS is a new technique for creating 3D models from a small number of camera views. Traditional methods for 3D reconstruction often require dozens or even hundreds of input images to produce high-quality results. In contrast, LoopSparseGS can generate detailed 3D models using just a few input views.
The core innovation is a "loop-based" approach to a key step called "Gaussian splatting." Gaussian splatting is used to distribute the information from each input view across the 3D model. LoopSparseGS performs this operation more efficiently by organizing the computations into iterative loops. This makes the process faster and more scalable, especially when working with sparse input data.
Additionally, LoopSparseGS incorporates an "attention mechanism" to help the system focus on the most important regions of the 3D model. This attention mechanism adaptively adjusts the Gaussian splatting process based on the input views, allowing the model to make the best use of the limited information available.
The end result is a 3D reconstruction system that can produce high-quality, realistic models from just a handful of input camera views. This has exciting applications in areas like virtual reality, augmented reality, and 3D content creation, where quickly capturing 3D scenes is important.
Technical Explanation
The key technical elements of the LoopSparseGS approach include:
-
Loop-based Gaussian Splatting: Traditional Gaussian splatting methods can be computationally expensive, especially when working with sparse input views. LoopSparseGS reorganizes the splatting computations into a series of iterative loops, which improves efficiency and scalability.
-
Attention Mechanism: LoopSparseGS incorporates an attention mechanism that adaptively adjusts the Gaussian splatting process based on the input views. This allows the system to focus on the most important regions of the 3D model, making better use of the limited information available in sparse-view scenarios.
-
End-to-end Training: The LoopSparseGS system is trained in an end-to-end fashion, allowing the attention mechanism and splatting computations to be optimized jointly for the task of 3D reconstruction from sparse views.
The authors evaluate LoopSparseGS on several benchmark datasets for sparse-view 3D reconstruction, demonstrating significant improvements in both quality and efficiency compared to previous state-of-the-art methods.
Critical Analysis
The LoopSparseGS paper presents a compelling approach to the challenge of 3D reconstruction from sparse input views. The authors have identified an important problem and developed a novel technical solution to address it.
One potential limitation of the approach is that it may still struggle with extremely sparse input data, such as just a single or a few input views. While the attention mechanism helps, there may be fundamental limits to what can be reconstructed from such limited information. Further research may be needed to push the boundaries of what is possible with sparse-view 3D reconstruction.
Additionally, the paper does not delve into the computational complexity of the LoopSparseGS algorithm. While the authors claim improved efficiency, a more detailed analysis of the time and memory requirements would be helpful for understanding the practical implications and deployment considerations.
Overall, the LoopSparseGS paper represents an important contribution to the field of sparse-view 3D reconstruction. The novel techniques and insights presented here could inspire further advancements in this area, with the potential to enable more accessible and practical 3D capture and modeling solutions.
Conclusion
LoopSparseGS is a new approach to 3D reconstruction that can generate high-quality models from a limited number of input views. By introducing loop-based Gaussian splatting and an attention mechanism, the system is able to efficiently process sparse input data and focus on the most important regions of the 3D scene.
This work has significant implications for applications like virtual reality, augmented reality, and 3D content creation, where quickly capturing 3D scenes is crucial. The ability to create detailed 3D models from just a few camera views could streamline 3D content production and enable more accessible 3D capture solutions.
While the LoopSparseGS technique shows promise, further research may be needed to address the limitations of extremely sparse input data and to fully characterize the computational requirements of the algorithm. Nonetheless, this paper represents an important step forward in the field of sparse-view 3D reconstruction.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
LoopSparseGS: Loop Based Sparse-View Friendly Gaussian Splatting
Zhenyu Bao, Guibiao Liao, Kaichen Zhou, Kanglin Liu, Qing Li, Guoping Qiu
Despite the photorealistic novel view synthesis (NVS) performance achieved by the original 3D Gaussian splatting (3DGS), its rendering quality significantly degrades with sparse input views. This performance drop is mainly caused by the limited number of initial points generated from the sparse input, insufficient supervision during the training process, and inadequate regularization of the oversized Gaussian ellipsoids. To handle these issues, we propose the LoopSparseGS, a loop-based 3DGS framework for the sparse novel view synthesis task. In specific, we propose a loop-based Progressive Gaussian Initialization (PGI) strategy that could iteratively densify the initialized point cloud using the rendered pseudo images during the training process. Then, the sparse and reliable depth from the Structure from Motion, and the window-based dense monocular depth are leveraged to provide precise geometric supervision via the proposed Depth-alignment Regularization (DAR). Additionally, we introduce a novel Sparse-friendly Sampling (SFS) strategy to handle oversized Gaussian ellipsoids leading to large pixel errors. Comprehensive experiments on four datasets demonstrate that LoopSparseGS outperforms existing state-of-the-art methods for sparse-input novel view synthesis, across indoor, outdoor, and object-level scenes with various image resolutions.
Read more8/2/2024
0
SparseGS: Real-Time 360{deg} Sparse View Synthesis using Gaussian Splatting
Haolin Xiong, Sairisheek Muttukuru, Rishi Upadhyay, Pradyumna Chari, Achuta Kadambi
The problem of novel view synthesis has grown significantly in popularity recently with the introduction of Neural Radiance Fields (NeRFs) and other implicit scene representation methods. A recent advance, 3D Gaussian Splatting (3DGS), leverages an explicit representation to achieve real-time rendering with high-quality results. However, 3DGS still requires an abundance of training views to generate a coherent scene representation. In few shot settings, similar to NeRF, 3DGS tends to overfit to training views, causing background collapse and excessive floaters, especially as the number of training views are reduced. We propose a method to enable training coherent 3DGS-based radiance fields of 360-degree scenes from sparse training views. We integrate depth priors with generative and explicit constraints to reduce background collapse, remove floaters, and enhance consistency from unseen viewpoints. Experiments show that our method outperforms base 3DGS by 6.4% in LPIPS and by 12.2% in PSNR, and NeRF-based methods by at least 17.6% in LPIPS on the MipNeRF-360 dataset with substantially less training and inference cost.
Read more5/14/2024

0
Optimizing 3D Gaussian Splatting for Sparse Viewpoint Scene Reconstruction
Shen Chen, Jiale Zhou, Lei Li
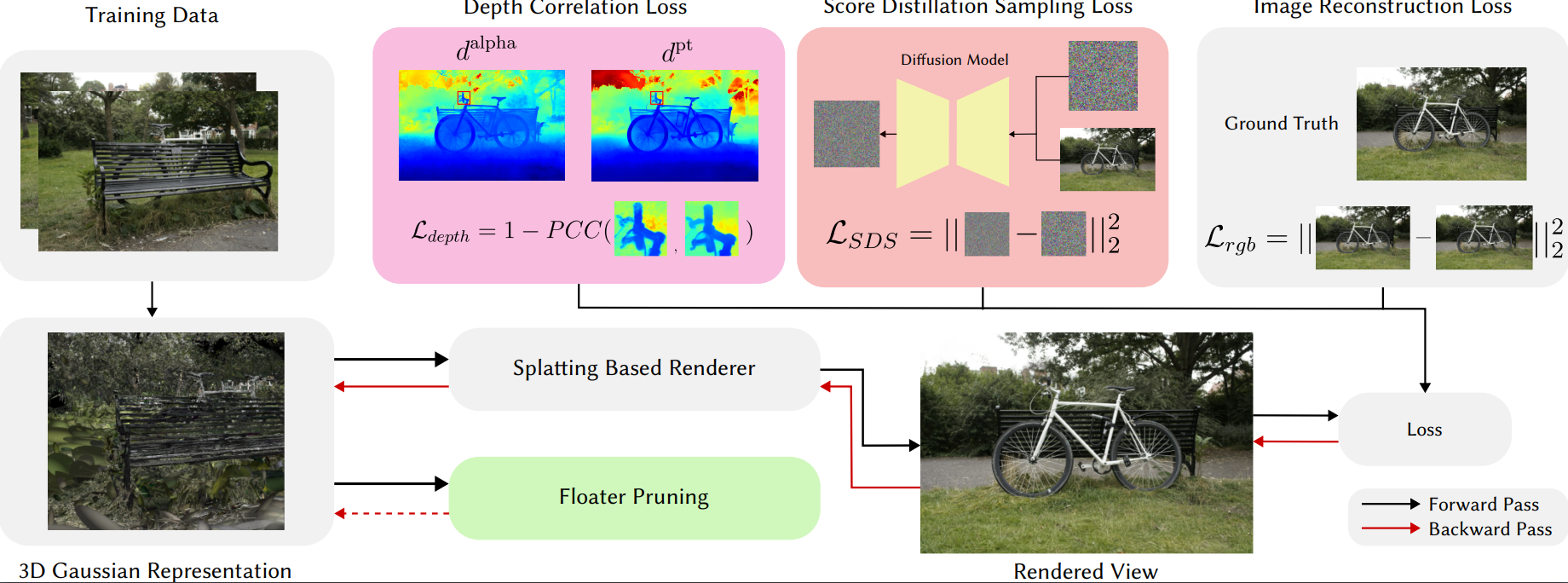
3D Gaussian Splatting (3DGS) has emerged as a promising approach for 3D scene representation, offering a reduction in computational overhead compared to Neural Radiance Fields (NeRF). However, 3DGS is susceptible to high-frequency artifacts and demonstrates suboptimal performance under sparse viewpoint conditions, thereby limiting its applicability in robotics and computer vision. To address these limitations, we introduce SVS-GS, a novel framework for Sparse Viewpoint Scene reconstruction that integrates a 3D Gaussian smoothing filter to suppress artifacts. Furthermore, our approach incorporates a Depth Gradient Profile Prior (DGPP) loss with a dynamic depth mask to sharpen edges and 2D diffusion with Score Distillation Sampling (SDS) loss to enhance geometric consistency in novel view synthesis. Experimental evaluations on the MipNeRF-360 and SeaThru-NeRF datasets demonstrate that SVS-GS markedly improves 3D reconstruction from sparse viewpoints, offering a robust and efficient solution for scene understanding in robotics and computer vision applications.
Read more9/6/2024
0
FSGS: Real-Time Few-shot View Synthesis using Gaussian Splatting
Zehao Zhu, Zhiwen Fan, Yifan Jiang, Zhangyang Wang
Novel view synthesis from limited observations remains an important and persistent task. However, high efficiency in existing NeRF-based few-shot view synthesis is often compromised to obtain an accurate 3D representation. To address this challenge, we propose a few-shot view synthesis framework based on 3D Gaussian Splatting that enables real-time and photo-realistic view synthesis with as few as three training views. The proposed method, dubbed FSGS, handles the extremely sparse initialized SfM points with a thoughtfully designed Gaussian Unpooling process. Our method iteratively distributes new Gaussians around the most representative locations, subsequently infilling local details in vacant areas. We also integrate a large-scale pre-trained monocular depth estimator within the Gaussians optimization process, leveraging online augmented views to guide the geometric optimization towards an optimal solution. Starting from sparse points observed from limited input viewpoints, our FSGS can accurately grow into unseen regions, comprehensively covering the scene and boosting the rendering quality of novel views. Overall, FSGS achieves state-of-the-art performance in both accuracy and rendering efficiency across diverse datasets, including LLFF, Mip-NeRF360, and Blender. Project website: https://zehaozhu.github.io/FSGS/.
Read more6/18/2024