Counting Objects in a Robotic Hand

0

Sign in to get full access
Overview
- This paper explores techniques for counting objects in a robotic hand using computer vision and machine learning.
- The researchers develop a system that can accurately detect and enumerate various objects grasped by a multi-fingered robotic hand.
- The proposed approach leverages deep learning models and sensor data to achieve robust object counting capabilities, which have applications in robotic manipulation and grasping tasks.
Plain English Explanation
The paper describes a system that can automatically count the number of objects a robotic hand is grasping. This is an important capability for robots that need to interact with and manipulate multiple objects in their environment.
The key idea is to use computer vision and machine learning techniques to analyze the sensor data from the robotic hand. A deep learning model is trained to detect and recognize the different objects the hand is holding. By tracking the individual objects, the system can then count how many there are.
This could be useful in a variety of robotic applications, such as warehouse automation, household assistance, or manufacturing. Being able to accurately count the objects a robot is handling can help improve the efficiency and safety of these tasks.
The paper describes the technical details of the object counting system, including the sensor setup, the deep learning model architecture, and the training and inference processes. The researchers also present experimental results demonstrating the effectiveness of their approach on a variety of object types and grasping scenarios.
Technical Explanation
The proposed object counting system uses a combination of tactile and visual sensors embedded in a multi-fingered robotic hand. The tactile sensors provide information about the contact forces and pressure distribution, while the visual sensors capture images of the grasped objects.
A deep neural network is trained to process the sensor data and detect the individual objects being grasped. The network architecture includes convolutional layers to extract visual features and fully connected layers to integrate the tactile and visual information. The model is trained on a dataset of simulated and real-world grasping scenarios, using techniques like domain adaptation to improve its generalization.
During inference, the trained model takes the sensor data as input and outputs the number of objects being grasped, as well as their individual poses and identities. This information can then be used by the robot's control system to manipulate the objects or hand them off to a human as needed.
The researchers evaluate their system on a range of object types and grasping configurations, demonstrating its ability to accurately count the number of objects with high reliability. They also discuss potential limitations and future research directions, such as improving the system's robustness to occlusions and dynamic changes in the grasped objects.
Critical Analysis
The paper presents a well-designed and thorough approach to the problem of object counting in robotic grasping. The use of both tactile and visual sensors, as well as the integration of these modalities through a deep learning model, is a compelling strategy that leverages the complementary strengths of these sensing technologies.
One potential limitation is the reliance on a pre-defined set of objects for training the deep learning model. While the researchers demonstrate the system's ability to generalize to novel objects, it would be valuable to explore more open-ended object recognition and counting capabilities that could handle a wider range of objects without requiring prior training.
Additionally, the paper does not delve into the computational and resource requirements of the proposed system, which could be an important consideration for real-world deployment on resource-constrained robotic platforms. Further analysis of the system's efficiency and scalability would help contextualize its practical applicability.
Overall, the research described in this paper represents a promising step forward in enhancing the object manipulation and handling capabilities of robotic systems. The integration of advanced sensing and machine learning techniques holds significant potential for improving the safety, reliability, and versatility of robotic interactions with the physical world.
Conclusion
This paper presents a novel approach for accurately counting the number of objects grasped by a multi-fingered robotic hand. By leveraging a combination of tactile and visual sensors, along with a deep learning-based object detection and recognition system, the researchers have developed a robust solution for this important capability in robotic manipulation.
The proposed system demonstrates strong performance across a variety of object types and grasping scenarios, highlighting its potential applications in areas like warehouse automation, household assistance, and manufacturing. The technical details and experimental results provide valuable insights into the challenges and opportunities in this domain, paving the way for further advancements in robotic perception and object handling.
As robots continue to play an increasingly important role in our daily lives and in industrial settings, capabilities like the one described in this paper will become increasingly crucial. The ability to reliably and efficiently interact with multiple objects is a key step towards more intelligent, versatile, and safe robotic systems that can seamlessly cooperate with humans and adapt to dynamic environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Counting Objects in a Robotic Hand
Francis Tsow, Tianze Chen, Yu Sun
A robot performing multi-object grasping needs to sense the number of objects in the hand after grasping. The count plays an important role in determining the robot's next move and the outcome and efficiency of the whole pick-place process. This paper presents a data-driven contrastive learning-based counting classifier with a modified loss function as a simple and effective approach for object counting despite significant occlusion challenges caused by robotic fingers and objects. The model was validated against other models with three different common shapes (spheres, cylinders, and cubes) in simulation and in a real setup. The proposed contrastive learning-based counting approach achieved above 96% accuracy for all three objects in the real setup.
Read more4/11/2024

0
Multi-fingered Robotic Hand Grasping in Cluttered Environments through Hand-object Contact Semantic Mapping
Lei Zhang, Kaixin Bai, Guowen Huang, Zhaopeng Chen, Jianwei Zhang
The integration of optimization method and generative models has significantly advanced dexterous manipulation techniques for five-fingered hand grasping. Yet, the application of these techniques in cluttered environments is a relatively unexplored area. To address this research gap, we have developed a novel method for generating five-fingered hand grasp samples in cluttered settings. This method emphasizes simulated grasp quality and the nuanced interaction between the hand and surrounding objects. A key aspect of our approach is our data generation method, capable of estimating contact spatial and semantic representations and affordance grasps based on object affordance information. Furthermore, our Contact Semantic Conditional Variational Autoencoder (CoSe-CVAE) network is adept at creating comprehensive contact maps from point clouds, incorporating both spatial and semantic data. We introduce a unique grasp detection technique that efficiently formulates mechanical hand grasp poses from these maps. Additionally, our evaluation model is designed to assess grasp quality and collision probability, significantly improving the practicality of five-fingered hand grasping in complex scenarios. Our data generation method outperforms previous datasets in grasp diversity, scene diversity, modality diversity. Our grasp generation method has demonstrated remarkable success, outperforming established baselines with 81.0% average success rate in real-world single-object grasping and 75.3% success rate in multi-object grasping. The dataset and supplementary materials can be found at https://sites.google.com/view/ffh-clutteredgrasping, and we will release the code upon publication.
Read more4/16/2024
0
Grasping Diverse Objects with Simulated Humanoids
Zhengyi Luo, Jinkun Cao, Sammy Christen, Alexander Winkler, Kris Kitani, Weipeng Xu
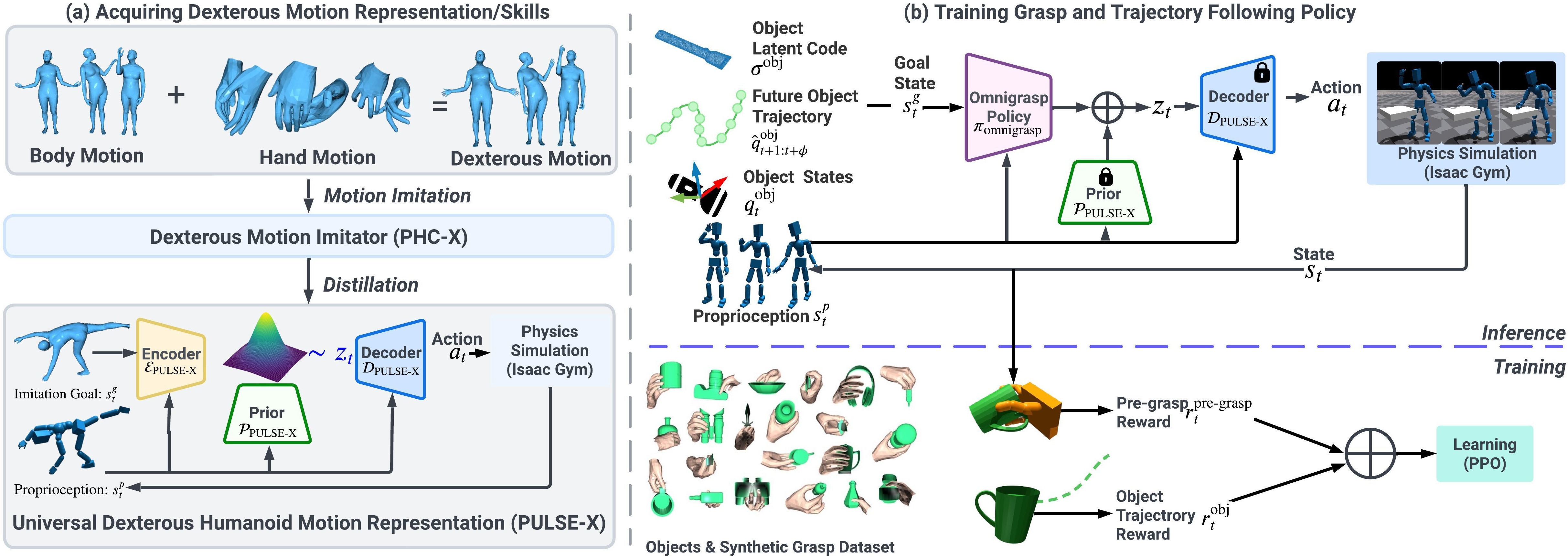
We present a method for controlling a simulated humanoid to grasp an object and move it to follow an object trajectory. Due to the challenges in controlling a humanoid with dexterous hands, prior methods often use a disembodied hand and only consider vertical lifts or short trajectories. This limited scope hampers their applicability for object manipulation required for animation and simulation. To close this gap, we learn a controller that can pick up a large number (>1200) of objects and carry them to follow randomly generated trajectories. Our key insight is to leverage a humanoid motion representation that provides human-like motor skills and significantly speeds up training. Using only simplistic reward, state, and object representations, our method shows favorable scalability on diverse object and trajectories. For training, we do not need dataset of paired full-body motion and object trajectories. At test time, we only require the object mesh and desired trajectories for grasping and transporting. To demonstrate the capabilities of our method, we show state-of-the-art success rates in following object trajectories and generalizing to unseen objects. Code and models will be released.
Read more7/17/2024

0
Iterative Object Count Optimization for Text-to-image Diffusion Models
Oz Zafar, Lior Wolf, Idan Schwartz
We address a persistent challenge in text-to-image models: accurately generating a specified number of objects. Current models, which learn from image-text pairs, inherently struggle with counting, as training data cannot depict every possible number of objects for any given object. To solve this, we propose optimizing the generated image based on a counting loss derived from a counting model that aggregates an object's potential. Employing an out-of-the-box counting model is challenging for two reasons: first, the model requires a scaling hyperparameter for the potential aggregation that varies depending on the viewpoint of the objects, and second, classifier guidance techniques require modified models that operate on noisy intermediate diffusion steps. To address these challenges, we propose an iterated online training mode that improves the accuracy of inferred images while altering the text conditioning embedding and dynamically adjusting hyperparameters. Our method offers three key advantages: (i) it can consider non-derivable counting techniques based on detection models, (ii) it is a zero-shot plug-and-play solution facilitating rapid changes to the counting techniques and image generation methods, and (iii) the optimized counting token can be reused to generate accurate images without additional optimization. We evaluate the generation of various objects and show significant improvements in accuracy. The project page is available at https://ozzafar.github.io/count_token.
Read more8/22/2024