Cross-Architecture Auxiliary Feature Space Translation for Efficient Few-Shot Personalized Object Detection

0

Sign in to get full access
Overview
- This paper presents a novel approach called "Cross-Architecture Auxiliary Feature Space Translation" (CAFS-T) for efficient few-shot personalized object detection.
- The key idea is to leverage auxiliary feature spaces from pre-trained models to aid in personalizing the object detection task with limited training data.
- The method aims to improve the performance and efficiency of few-shot personalized object detection, which has important applications in areas like autonomous exploration and personalized AI assistants.
Plain English Explanation
The paper introduces a new technique called "Cross-Architecture Auxiliary Feature Space Translation" (CAFS-T) to make object detection models more efficient and effective when only a small amount of training data is available. Object detection is the task of identifying and locating objects in an image, and it's a crucial capability for many AI applications like self-driving cars and personalized digital assistants.
Traditional object detection models require a large amount of training data to work well. But in many real-world scenarios, like a person teaching their digital assistant to recognize their own personal belongings, there may only be a few examples available. CAFS-T addresses this challenge by leveraging "auxiliary feature spaces" - the internal representations learned by other pre-trained models - to help personalize the object detector with limited data.
The key insight is that even though the pre-trained models weren't trained on the specific objects you care about, their internal representations can still provide useful information to adapt the object detector to your needs. CAFS-T does this by learning how to translate between the auxiliary feature spaces of the pre-trained models and the feature space needed for your particular object detection task.
By using this cross-architecture translation, the model can quickly adapt to new object categories with just a few training examples. This makes object detection much more practical and efficient in real-world applications where training data is scarce, like autonomous exploration or personalized digital assistants.
Technical Explanation
The core of the CAFS-T approach is to leverage auxiliary feature spaces from pre-trained models like 3D feature distillation and discriminative sample-guided parameter-efficient feature space to aid in the few-shot personalized object detection task.
The key steps are:
- Obtain auxiliary feature representations from pre-trained models on large-scale datasets.
- Learn a translation function to map between the auxiliary feature spaces and the feature space needed for the target object detection task.
- Use the translated auxiliary features to augment the limited training data and personalize the object detector.
The authors demonstrate the effectiveness of CAFS-T on several few-shot object detection benchmarks, showing significant improvements over baselines that don't leverage the auxiliary feature spaces. They also analyze the impact of different pre-trained models and feature spaces, finding that semantic-rich representations like those from semantic-enhanced few-shot object detection tend to be most helpful.
Critical Analysis
The paper presents a compelling approach to address the challenge of few-shot personalized object detection. The key strength is the clever use of auxiliary feature spaces from pre-trained models to overcome the limitations of scarce training data.
However, the authors acknowledge some limitations. First, the performance of CAFS-T is still dependent on the quality and relevance of the pre-trained models used. If the auxiliary feature spaces don't contain useful information for the target objects, the translation step won't be effective.
Additionally, the training process for learning the translation function adds some computational overhead, which could be a concern for real-time applications. The authors suggest exploring more efficient translation architectures as an area for future work.
Another potential issue is the reliance on the availability of suitable pre-trained models. In some domains or for specialized objects, such pre-trained models may not exist, limiting the applicability of the CAFS-T approach.
Despite these caveats, the core idea of leveraging cross-architecture auxiliary features is a promising direction for making object detection more efficient and personalized, especially in scenarios with limited training data. Further research in this area could lead to significant advancements in areas like autonomous exploration and personalized digital assistants.
Conclusion
The "Cross-Architecture Auxiliary Feature Space Translation" (CAFS-T) approach presented in this paper is a novel and effective technique for improving the efficiency and performance of few-shot personalized object detection. By leveraging auxiliary feature spaces from pre-trained models, CAFS-T can adapt object detectors to new object categories with limited training data, making object detection much more practical for real-world applications.
The key innovation is the ability to translate between the feature representations of pre-trained models and the feature space needed for the target object detection task. This cross-architecture translation allows the model to quickly personalize to new objects, overcoming the data scarcity challenge that often hinders traditional object detection approaches.
While the method has some limitations, such as its reliance on the availability and relevance of pre-trained models, the core idea of exploiting auxiliary feature spaces is a promising direction for advancing few-shot object detection. Further research in this area could lead to significant breakthroughs in areas like autonomous exploration, personalized digital assistants, and other applications where object detection needs to be efficient and adaptable to individual user preferences and environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Cross-Architecture Auxiliary Feature Space Translation for Efficient Few-Shot Personalized Object Detection
Francesco Barbato, Umberto Michieli, Jijoong Moon, Pietro Zanuttigh, Mete Ozay
Recent years have seen object detection robotic systems deployed in several personal devices (e.g., home robots and appliances). This has highlighted a challenge in their design, i.e., they cannot efficiently update their knowledge to distinguish between general classes and user-specific instances (e.g., a dog vs. user's dog). We refer to this challenging task as Instance-level Personalized Object Detection (IPOD). The personalization task requires many samples for model tuning and optimization in a centralized server, raising privacy concerns. An alternative is provided by approaches based on recent large-scale Foundation Models, but their compute costs preclude on-device applications. In our work we tackle both problems at the same time, designing a Few-Shot IPOD strategy called AuXFT. We introduce a conditional coarse-to-fine few-shot learner to refine the coarse predictions made by an efficient object detector, showing that using an off-the-shelf model leads to poor personalization due to neural collapse. Therefore, we introduce a Translator block that generates an auxiliary feature space where features generated by a self-supervised model (e.g., DINOv2) are distilled without impacting the performance of the detector. We validate AuXFT on three publicly available datasets and one in-house benchmark designed for the IPOD task, achieving remarkable gains in all considered scenarios with excellent time-complexity trade-off: AuXFT reaches a performance of 80% its upper bound at just 32% of the inference time, 13% of VRAM and 19% of the model size.
Read more7/2/2024
🔎
0
Cross-Domain Few-Shot Object Detection via Enhanced Open-Set Object Detector
Yuqian Fu, Yu Wang, Yixuan Pan, Lian Huai, Xingyu Qiu, Zeyu Shangguan, Tong Liu, Yanwei Fu, Luc Van Gool, Xingqun Jiang
This paper studies the challenging cross-domain few-shot object detection (CD-FSOD), aiming to develop an accurate object detector for novel domains with minimal labeled examples. While transformer-based open-set detectors, such as DE-ViT, show promise in traditional few-shot object detection, their generalization to CD-FSOD remains unclear: 1) can such open-set detection methods easily generalize to CD-FSOD? 2) If not, how can models be enhanced when facing huge domain gaps? To answer the first question, we employ measures including style, inter-class variance (ICV), and indefinable boundaries (IB) to understand the domain gap. Based on these measures, we establish a new benchmark named CD-FSOD to evaluate object detection methods, revealing that most of the current approaches fail to generalize across domains. Technically, we observe that the performance decline is associated with our proposed measures: style, ICV, and IB. Consequently, we propose several novel modules to address these issues. First, the learnable instance features align initial fixed instances with target categories, enhancing feature distinctiveness. Second, the instance reweighting module assigns higher importance to high-quality instances with slight IB. Third, the domain prompter encourages features resilient to different styles by synthesizing imaginary domains without altering semantic contents. These techniques collectively contribute to the development of the Cross-Domain Vision Transformer for CD-FSOD (CD-ViTO), significantly improving upon the base DE-ViT. Experimental results validate the efficacy of our model.
Read more9/30/2024
0
AirShot: Efficient Few-Shot Detection for Autonomous Exploration
Zihan Wang, Bowen Li, Chen Wang, Sebastian Scherer
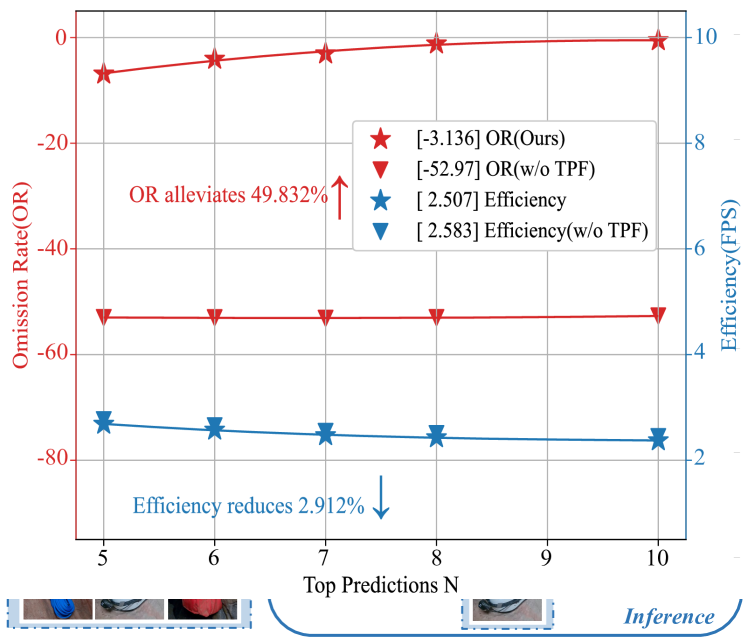
Few-shot object detection has drawn increasing attention in the field of robotic exploration, where robots are required to find unseen objects with a few online provided examples. Despite recent efforts have been made to yield online processing capabilities, slow inference speeds of low-powered robots fail to meet the demands of real-time detection-making them impractical for autonomous exploration. Existing methods still face performance and efficiency challenges, mainly due to unreliable features and exhaustive class loops. In this work, we propose a new paradigm AirShot, and discover that, by fully exploiting the valuable correlation map, AirShot can result in a more robust and faster few-shot object detection system, which is more applicable to robotics community. The core module Top Prediction Filter (TPF) can operate on multi-scale correlation maps in both the training and inference stages. During training, TPF supervises the generation of a more representative correlation map, while during inference, it reduces looping iterations by selecting top-ranked classes, thus cutting down on computational costs with better performance. Surprisingly, this dual functionality exhibits general effectiveness and efficiency on various off-the-shelf models. Exhaustive experiments on COCO2017, VOC2014, and SubT datasets demonstrate that TPF can significantly boost the efficacy and efficiency of most off-the-shelf models, achieving up to 36.4% precision improvements along with 56.3% faster inference speed. Code and Data are at: https://github.com/ImNotPrepared/AirShot.
Read more4/9/2024

0
Swiss DINO: Efficient and Versatile Vision Framework for On-device Personal Object Search
Kirill Paramonov, Jia-Xing Zhong, Umberto Michieli, Jijoong Moon, Mete Ozay
In this paper, we address a recent trend in robotic home appliances to include vision systems on personal devices, capable of personalizing the appliances on the fly. In particular, we formulate and address an important technical task of personal object search, which involves localization and identification of personal items of interest on images captured by robotic appliances, with each item referenced only by a few annotated images. The task is crucial for robotic home appliances and mobile systems, which need to process personal visual scenes or to operate with particular personal objects (e.g., for grasping or navigation). In practice, personal object search presents two main technical challenges. First, a robot vision system needs to be able to distinguish between many fine-grained classes, in the presence of occlusions and clutter. Second, the strict resource requirements for the on-device system restrict the usage of most state-of-the-art methods for few-shot learning and often prevent on-device adaptation. In this work, we propose Swiss DINO: a simple yet effective framework for one-shot personal object search based on the recent DINOv2 transformer model, which was shown to have strong zero-shot generalization properties. Swiss DINO handles challenging on-device personalized scene understanding requirements and does not require any adaptation training. We show significant improvement (up to 55%) in segmentation and recognition accuracy compared to the common lightweight solutions, and significant footprint reduction of backbone inference time (up to 100x) and GPU consumption (up to 10x) compared to the heavy transformer-based solutions.
Read more7/11/2024