Crossfusor: A Cross-Attention Transformer Enhanced Conditional Diffusion Model for Car-Following Trajectory Prediction

0

Sign in to get full access
Overview
- This paper introduces Crossfusor, a novel deep learning model for predicting the future trajectories of vehicles in a car-following scenario.
- The model combines a conditional diffusion model with a cross-attention transformer to capture both the temporal dynamics and social interactions between vehicles.
- The authors evaluate Crossfusor on several benchmark datasets and show that it outperforms state-of-the-art methods for car-following trajectory prediction.
Plain English Explanation
Crossfusor is a new AI system designed to predict how vehicles will move on the road in the future. When you're driving, you're often following another car, and it's important to be able to predict how that car will move so you can drive safely. Crossfusor uses two key techniques to make these predictions:
-
Conditional Diffusion Model: This is a type of machine learning model that can generate realistic-looking future trajectories by starting with random "noise" and gradually refining it based on the current state of the vehicles.
-
Cross-Attention Transformer: This is a neural network architecture that can capture the complex interactions between the vehicles, such as how they influence each other's movements. It pays attention to the relationships between the cars, not just their individual behaviors.
By combining these two techniques, Crossfusor is able to make more accurate predictions of how vehicles will move in a car-following scenario compared to previous methods. The authors tested Crossfusor on several standard datasets and showed that it outperformed other state-of-the-art models.
Technical Explanation
Crossfusor is a deep learning model that combines a conditional diffusion model with a cross-attention transformer to predict the future trajectories of vehicles in a car-following scenario.
The conditional diffusion model is used to generate the future trajectory of the ego vehicle (the one being predicted) given its current state and the state of the lead vehicle. This model works by starting with random "noise" and gradually refining it to match the desired trajectory, guided by the current vehicle states.
The cross-attention transformer is used to capture the social interactions between the ego vehicle and the lead vehicle. It takes in the current states of both vehicles and learns to model how they influence each other's movements through a series of cross-attention layers.
By combining the temporal dynamics modeled by the conditional diffusion model with the social interactions modeled by the cross-attention transformer, Crossfusor is able to make more accurate predictions of the ego vehicle's future trajectory compared to previous methods. The authors evaluate Crossfusor on several standard car-following datasets and show that it outperforms state-of-the-art models like Transfer Learning Study and Spatial-Social Situation-Aware Transformer.
Critical Analysis
The authors of the Crossfusor paper have made a strong contribution to the field of car-following trajectory prediction. The combination of a conditional diffusion model and a cross-attention transformer is a novel and effective approach that leverages both the temporal dynamics and social interactions between vehicles.
However, there are a few potential limitations and areas for further research:
-
Dataset Bias: The authors evaluate Crossfusor on standard car-following datasets, which may not capture the full range of real-world driving scenarios. It would be valuable to test the model on more diverse datasets, including urban environments and scenarios with more complex traffic patterns.
-
Computational Complexity: The cross-attention mechanism used in Crossfusor may be computationally expensive, especially for large-scale deployment in real-time systems. Exploring ways to optimize the model's efficiency would be an important next step.
-
Interpretability: As with many deep learning models, the inner workings of Crossfusor may be difficult to interpret, which could limit its adoption in safety-critical applications. Developing more transparent or explainable versions of the model could be a fruitful area of research.
Overall, the Crossfusor paper presents a promising approach to car-following trajectory prediction, and the authors' rigorous evaluation and thoughtful discussion of potential limitations suggest a strong foundation for future work in this area.
Conclusion
The Crossfusor model introduced in this paper represents an innovative approach to car-following trajectory prediction, combining a conditional diffusion model and a cross-attention transformer to capture both the temporal dynamics and social interactions between vehicles. The authors' thorough evaluation and discussion of the model's strengths and potential limitations provide a solid basis for further research and development in this important domain.
As the adoption of autonomous and semi-autonomous vehicles continues to grow, the ability to accurately predict the future trajectories of surrounding vehicles will become increasingly critical for ensuring safe and efficient transportation. The Crossfusor model's demonstrated performance improvements over state-of-the-art methods suggest that it could be a valuable tool in advancing this field and contributing to the development of more intelligent and responsive transportation systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Crossfusor: A Cross-Attention Transformer Enhanced Conditional Diffusion Model for Car-Following Trajectory Prediction
Junwei You, Haotian Shi, Keshu Wu, Keke Long, Sicheng Fu, Sikai Chen, Bin Ran
Vehicle trajectory prediction is crucial for advancing autonomous driving and advanced driver assistance systems (ADAS), enhancing road safety and traffic efficiency. While traditional methods have laid foundational work, modern deep learning techniques, particularly transformer-based models and generative approaches, have significantly improved prediction accuracy by capturing complex and non-linear patterns in vehicle motion and traffic interactions. However, these models often overlook the detailed car-following behaviors and inter-vehicle interactions essential for real-world driving scenarios. This study introduces a Cross-Attention Transformer Enhanced Conditional Diffusion Model (Crossfusor) specifically designed for car-following trajectory prediction. Crossfusor integrates detailed inter-vehicular interactions and car-following dynamics into a robust diffusion framework, improving both the accuracy and realism of predicted trajectories. The model leverages a novel temporal feature encoding framework combining GRU, location-based attention mechanisms, and Fourier embedding to capture historical vehicle dynamics. It employs noise scaled by these encoded historical features in the forward diffusion process, and uses a cross-attention transformer to model intricate inter-vehicle dependencies in the reverse denoising process. Experimental results on the NGSIM dataset demonstrate that Crossfusor outperforms state-of-the-art models, particularly in long-term predictions, showcasing its potential for enhancing the predictive capabilities of autonomous driving systems.
Read more6/19/2024

0
CCDSReFormer: Traffic Flow Prediction with a Criss-Crossed Dual-Stream Enhanced Rectified Transformer Model
Zhiqi Shao, Michael G. H. Bell, Ze Wang, D. Glenn Geers, Xusheng Yao, Junbin Gao
Accurate, and effective traffic forecasting is vital for smart traffic systems, crucial in urban traffic planning and management. Current Spatio-Temporal Transformer models, despite their prediction capabilities, struggle with balancing computational efficiency and accuracy, favoring global over local information, and handling spatial and temporal data separately, limiting insight into complex interactions. We introduce the Criss-Crossed Dual-Stream Enhanced Rectified Transformer model (CCDSReFormer), which includes three innovative modules: Enhanced Rectified Spatial Self-attention (ReSSA), Enhanced Rectified Delay Aware Self-attention (ReDASA), and Enhanced Rectified Temporal Self-attention (ReTSA). These modules aim to lower computational needs via sparse attention, focus on local information for better traffic dynamics understanding, and merge spatial and temporal insights through a unique learning method. Extensive tests on six real-world datasets highlight CCDSReFormer's superior performance. An ablation study also confirms the significant impact of each component on the model's predictive accuracy, showcasing our model's ability to forecast traffic flow effectively.
Read more4/8/2024

0
Efficient Fusion and Task Guided Embedding for End-to-end Autonomous Driving
Yipin Guo, Yilin Lang, Qinyuan Ren
To address the challenges of sensor fusion and safety risk prediction, contemporary closed-loop autonomous driving neural networks leveraging imitation learning typically require a substantial volume of parameters and computational resources to run neural networks. Given the constrained computational capacities of onboard vehicular computers, we introduce a compact yet potent solution named EfficientFuser. This approach employs EfficientViT for visual information extraction and integrates feature maps via cross attention. Subsequently, it utilizes a decoder-only transformer for the amalgamation of multiple features. For prediction purposes, learnable vectors are embedded as tokens to probe the association between the task and sensor features through attention. Evaluated on the CARLA simulation platform, EfficientFuser demonstrates remarkable efficiency, utilizing merely 37.6% of the parameters and 8.7% of the computations compared to the state-of-the-art lightweight method with only 0.4% lower driving score, and the safety score neared that of the leading safety-enhanced method, showcasing its efficacy and potential for practical deployment in autonomous driving systems.
Read more7/18/2024
0
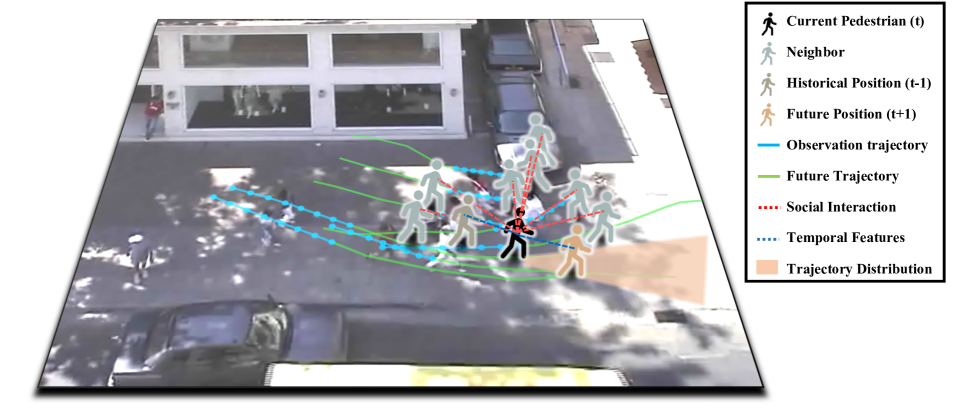
Attention-aware Social Graph Transformer Networks for Stochastic Trajectory Prediction
Yao Liu, Binghao Li, Xianzhi Wang, Claude Sammut, Lina Yao
Trajectory prediction is fundamental to various intelligent technologies, such as autonomous driving and robotics. The motion prediction of pedestrians and vehicles helps emergency braking, reduces collisions, and improves traffic safety. Current trajectory prediction research faces problems of complex social interactions, high dynamics and multi-modality. Especially, it still has limitations in long-time prediction. We propose Attention-aware Social Graph Transformer Networks for multi-modal trajectory prediction. We combine Graph Convolutional Networks and Transformer Networks by generating stable resolution pseudo-images from Spatio-temporal graphs through a designed stacking and interception method. Furthermore, we design the attention-aware module to handle social interaction information in scenarios involving mixed pedestrian-vehicle traffic. Thus, we maintain the advantages of the Graph and Transformer, i.e., the ability to aggregate information over an arbitrary number of neighbors and the ability to perform complex time-dependent data processing. We conduct experiments on datasets involving pedestrian, vehicle, and mixed trajectories, respectively. Our results demonstrate that our model minimizes displacement errors across various metrics and significantly reduces the likelihood of collisions. It is worth noting that our model effectively reduces the final displacement error, illustrating the ability of our model to predict for a long time.
Read more5/14/2024