CrowdSurfer: Sampling Optimization Augmented with Vector-Quantized Variational AutoEncoder for Dense Crowd Navigation

0
Sign in to get full access
Overview
- CrowdSurfer is a novel approach for dense crowd navigation that combines sampling optimization with a vector-quantized variational autoencoder (VQ-VAE).
- The paper presents a framework for efficiently navigating through dense crowds by learning an optimal sampling distribution from data.
- The VQ-VAE component is used to extract a compact representation of the crowd configuration, enabling more effective sampling and planning.
Plain English Explanation
CrowdSurfer: Sampling Optimization Augmented with Vector-Quantized Variational AutoEncoder for Dense Crowd Navigation is a research paper that describes a new method for navigating through dense crowds. The key idea is to combine two powerful techniques: sampling optimization and vector-quantized variational autoencoder (VQ-VAE).
Navigating through crowded environments, such as busy city streets or event venues, can be a significant challenge for autonomous systems like robots or self-driving cars. The crowd's density and unpredictability make it difficult to plan a safe and efficient path. CrowdSurfer addresses this problem by learning an optimal sampling distribution from data. This allows the system to generate candidate paths that are more likely to be successful, rather than randomly sampling the entire space of possible paths.
To make this sampling process even more effective, the researchers incorporate a VQ-VAE. This is a type of deep learning model that can extract a compact, high-level representation of the crowd configuration. By working with this compressed representation, the system can more efficiently explore the space of possible paths and find an optimal route through the crowd.
The combination of sampling optimization and VQ-VAE enables CrowdSurfer to navigate dense crowds more effectively than previous approaches. The system can quickly identify promising paths and adapt to changes in the crowd's dynamics, making it a valuable tool for a wide range of applications, from robotics to autonomous vehicles.
Technical Explanation
CrowdSurfer: Sampling Optimization Augmented with Vector-Quantized Variational AutoEncoder for Dense Crowd Navigation presents a novel framework for navigating through dense crowds. The key components of the CrowdSurfer approach are:
-
Sampling Optimization: The researchers formulate the crowd navigation problem as an optimization task, where the goal is to find an optimal sampling distribution that generates candidate paths with a high probability of success. This allows the system to focus its exploration on the most promising regions of the search space, rather than randomly sampling the entire space.
-
Vector-Quantized Variational Autoencoder (VQ-VAE): To make the sampling process more efficient, the researchers incorporate a VQ-VAE model. This deep learning architecture is used to extract a compact, high-level representation of the crowd configuration. By working with this compressed representation, the system can more effectively explore the space of possible paths and find an optimal route through the crowd.
The researchers evaluate the performance of CrowdSurfer on a range of simulated and real-world crowd scenarios, demonstrating its ability to navigate dense crowds more efficiently than previous approaches. The experimental results show that the combination of sampling optimization and VQ-VAE enables the system to quickly identify promising paths and adapt to changes in the crowd's dynamics.
Critical Analysis
The CrowdSurfer paper presents a compelling approach for dense crowd navigation, but it also raises a few important considerations:
-
Generalization to Real-World Scenarios: While the researchers demonstrate the effectiveness of CrowdSurfer on simulated and some real-world crowd scenarios, it's unclear how the system would perform in highly complex, unpredictable, and dynamic real-world environments. Further testing and validation in diverse, real-world settings would be necessary to fully assess the approach's practicality and robustness.
-
Computational Efficiency: The use of a VQ-VAE model introduces additional computational complexity, which could be a concern for real-time applications or resource-constrained systems. The researchers should explore ways to optimize the model's efficiency or consider alternative compact representation techniques.
-
Ethical Considerations: As with any autonomous navigation system, there are potential ethical implications to consider, such as the system's decision-making process, its ability to handle unexpected situations, and its potential impact on vulnerable populations within the crowd. The researchers should address these concerns and outline strategies for ensuring the ethical deployment of CrowdSurfer.
Overall, the CrowdSurfer approach represents a promising advancement in dense crowd navigation, but further research and real-world testing are necessary to fully validate its effectiveness and address potential limitations.
Conclusion
CrowdSurfer: Sampling Optimization Augmented with Vector-Quantized Variational AutoEncoder for Dense Crowd Navigation presents a novel framework for navigating through dense crowds by combining sampling optimization and vector-quantized variational autoencoder (VQ-VAE) techniques. The key innovation is the use of an optimal sampling distribution, learned from data, to generate candidate paths that are more likely to succeed, coupled with a compact representation of the crowd configuration provided by the VQ-VAE.
The experimental results demonstrate the effectiveness of this approach in navigating dense crowds more efficiently than previous methods. However, the researchers acknowledge the need for further testing and validation in diverse, real-world scenarios to fully assess the system's practicality and robustness. Additionally, ethical considerations and computational efficiency should be carefully addressed to ensure the responsible deployment of CrowdSurfer.
Overall, the CrowdSurfer framework represents an important step forward in the field of autonomous navigation, with the potential to significantly improve the ability of robots, self-driving cars, and other systems to navigate safely and efficiently through dense crowds.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
CrowdSurfer: Sampling Optimization Augmented with Vector-Quantized Variational AutoEncoder for Dense Crowd Navigation
Naman Kumar, Antareep Singha, Laksh Nanwani, Dhruv Potdar, Tarun R, Fatemeh Rastgar, Simon Idoko, Arun Kumar Singh, K. Madhava Krishna
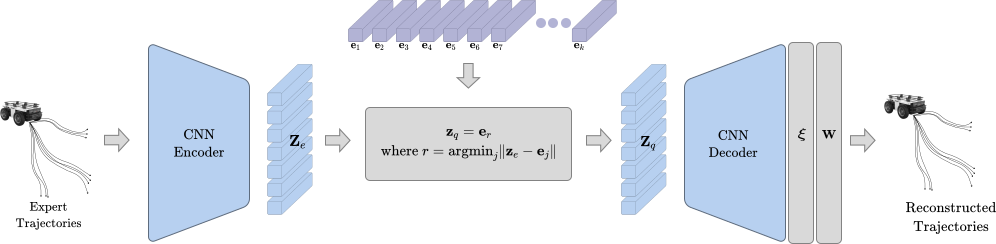
Navigation amongst densely packed crowds remains a challenge for mobile robots. The complexity increases further if the environment layout changes, making the prior computed global plan infeasible. In this paper, we show that it is possible to dramatically enhance crowd navigation by just improving the local planner. Our approach combines generative modelling with inference time optimization to generate sophisticated long-horizon local plans at interactive rates. More specifically, we train a Vector Quantized Variational AutoEncoder to learn a prior over the expert trajectory distribution conditioned on the perception input. At run-time, this is used as an initialization for a sampling-based optimizer for further refinement. Our approach does not require any sophisticated prediction of dynamic obstacles and yet provides state-of-the-art performance. In particular, we compare against the recent DRL-VO approach and show a 40% improvement in success rate and a 6% improvement in travel time.
Read more9/25/2024

0
Learning Sampling Distribution and Safety Filter for Autonomous Driving with VQ-VAE and Differentiable Optimization
Simon Idoko, Basant Sharma, Arun Kumar Singh
Sampling trajectories from a distribution followed by ranking them based on a specified cost function is a common approach in autonomous driving. Typically, the sampling distribution is hand-crafted (e.g a Gaussian, or a grid). Recently, there have been efforts towards learning the sampling distribution through generative models such as Conditional Variational Autoencoder (CVAE). However, these approaches fail to capture the multi-modality of the driving behaviour due to the Gaussian latent prior of the CVAE. Thus, in this paper, we re-imagine the distribution learning through vector quantized variational autoencoder (VQ-VAE), whose discrete latent-space is well equipped to capture multi-modal sampling distribution. The VQ-VAE is trained with demonstration data of optimal trajectories. We further propose a differentiable optimization based safety filter to minimally correct the VQVAE sampled trajectories to ensure collision avoidance. We use backpropagation through the optimization layers in a self-supervised learning set-up to learn good initialization and optimal parameters of the safety filter. We perform extensive comparisons with state-of-the-art CVAE-based baseline in dense and aggressive traffic scenarios and show a reduction of up to 12 times in collision-rate while being competitive in driving speeds.
Read more4/26/2024
0
Optimizing Vehicular Networks with Variational Quantum Circuits-based Reinforcement Learning
Zijiang Yan, Ramsundar Tanikella, Hina Tabassum
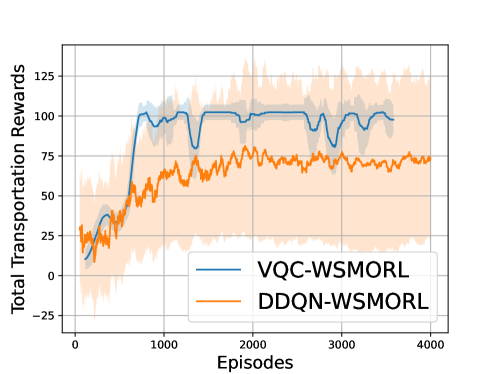
In vehicular networks (VNets), ensuring both road safety and dependable network connectivity is of utmost importance. Achieving this necessitates the creation of resilient and efficient decision-making policies that prioritize multiple objectives. In this paper, we develop a Variational Quantum Circuit (VQC)-based multi-objective reinforcement learning (MORL) framework to characterize efficient network selection and autonomous driving policies in a vehicular network (VNet). Numerical results showcase notable enhancements in both convergence rates and rewards when compared to conventional deep-Q networks (DQNs), validating the efficacy of the VQC-MORL solution.
Read more5/30/2024

0
Uncertainty-Aware DRL for Autonomous Vehicle Crowd Navigation in Shared Space
Mahsa Golchoubian, Moojan Ghafurian, Kerstin Dautenhahn, Nasser Lashgarian Azad
Safe, socially compliant, and efficient navigation of low-speed autonomous vehicles (AVs) in pedestrian-rich environments necessitates considering pedestrians' future positions and interactions with the vehicle and others. Despite the inevitable uncertainties associated with pedestrians' predicted trajectories due to their unobserved states (e.g., intent), existing deep reinforcement learning (DRL) algorithms for crowd navigation often neglect these uncertainties when using predicted trajectories to guide policy learning. This omission limits the usability of predictions when diverging from ground truth. This work introduces an integrated prediction and planning approach that incorporates the uncertainties of predicted pedestrian states in the training of a model-free DRL algorithm. A novel reward function encourages the AV to respect pedestrians' personal space, decrease speed during close approaches, and minimize the collision probability with their predicted paths. Unlike previous DRL methods, our model, designed for AV operation in crowded spaces, is trained in a novel simulation environment that reflects realistic pedestrian behaviour in a shared space with vehicles. Results show a 40% decrease in collision rate and a 15% increase in minimum distance to pedestrians compared to the state of the art model that does not account for prediction uncertainty. Additionally, the approach outperforms model predictive control methods that incorporate the same prediction uncertainties in terms of both performance and computational time, while producing trajectories closer to human drivers in similar scenarios.
Read more5/24/2024