Learning Sampling Distribution and Safety Filter for Autonomous Driving with VQ-VAE and Differentiable Optimization

0

Sign in to get full access
Overview
- The research paper proposes a novel approach for learning a sampling distribution and a safety filter for autonomous driving using Variational Quantized Variational Autoencoder (VQ-VAE) and differentiable optimization.
- The key ideas include: 1) Learning a sampling distribution for future trajectories that captures the inherent multimodality, 2) Designing a differentiable safety filter to ensure safe actions, and 3) Combining these components into an end-to-end system for autonomous driving.
Plain English Explanation
The paper tackles the challenge of enabling safe and reliable autonomous driving. One of the main difficulties is accurately predicting the future paths that other vehicles and objects might take, as this involves dealing with a lot of uncertainty and potential for unpredictable behavior.
The researchers developed a new method that learns a "sampling distribution" - essentially a model that can generate many plausible future trajectories, capturing the inherent multimodality (i.e., the fact that there are often multiple possible future paths). This is done using a technique called Variational Quantized Variational Autoencoder (VQ-VAE), which allows the model to learn a compact representation of the possible trajectories.
In addition, the researchers designed a "safety filter" - a module that can take these sampled trajectories and evaluate whether they are safe, rejecting any that would lead to collisions or other dangerous situations. Crucially, this safety filter is differentiable, meaning it can be trained end-to-end with the rest of the system.
By combining the sampling distribution and the safety filter, the researchers created a complete system that can generate diverse, plausible future trajectories and then automatically filter out the unsafe ones. This allows the autonomous driving system to plan its actions in a way that is both flexible (by considering multiple possible futures) and safe (by only selecting actions that are predicted to be safe).
The researchers tested their approach on a challenging autonomous driving simulation environment and found that it outperformed previous methods, demonstrating the potential of this new technique for enabling safer and more reliable self-driving cars.
Technical Explanation
The paper introduces a novel framework for learning a sampling distribution and a safety filter for autonomous driving using Variational Quantized Variational Autoencoder (VQ-VAE) and differentiable optimization.
The key components of the framework are:
-
Sampling Distribution Learning: The authors use VQ-VAE to learn a compact latent representation of possible future trajectories. This allows the model to capture the inherent multimodality of the trajectory space, generating a diverse set of plausible future paths.
-
Differentiable Safety Filter: The authors design a differentiable safety filter module that can evaluate the safety of the sampled trajectories. This filter is trained end-to-end with the rest of the system, allowing the safety considerations to be tightly integrated into the decision-making process.
-
End-to-End System: The sampling distribution and safety filter are combined into an end-to-end system for autonomous driving. The system can generate diverse, plausible future trajectories and then automatically select the safest ones for the vehicle to follow.
The authors evaluate their approach on a challenging autonomous driving simulation environment and show that it outperforms previous methods in terms of safety and flexibility. The ability to capture multimodal trajectory distributions and integrate safety considerations directly into the decision-making process are key strengths of the proposed framework.
Critical Analysis
The paper presents a compelling approach for addressing the challenges of safe and reliable autonomous driving. The researchers' use of VQ-VAE to learn a sampling distribution is a novel and promising technique, as it allows the model to capture the inherent complexity and multimodality of possible future trajectories.
One potential limitation of the approach is the reliance on a simulation environment for evaluation. While this is a common practice in autonomous driving research, it would be valuable to see the system tested on real-world driving data to better understand its performance and limitations in more realistic scenarios.
Additionally, the paper does not provide a detailed analysis of the safety filter's performance or the specific criteria used to evaluate safety. Further exploration of these aspects could help readers better understand the strengths and weaknesses of the proposed safety filter.
The authors also do not address potential issues around the interpretability and explainability of the system's decision-making process. As autonomous driving systems become more complex, there is an increasing need to understand how they arrive at their decisions, especially when it comes to safety-critical situations.
Despite these minor limitations, the paper presents a significant contribution to the field of autonomous driving, demonstrating the potential of combining advanced machine learning techniques like VQ-VAE with safety-focused optimization to enable more reliable and trustworthy self-driving systems.
Conclusion
The research paper proposes a novel framework that integrates a sampling distribution learned using VQ-VAE and a differentiable safety filter to enable safe and reliable autonomous driving. By capturing the inherent multimodality of possible future trajectories and tightly coupling safety considerations into the decision-making process, the authors have developed an approach that outperforms previous methods in simulation.
This work represents an important step forward in the quest for autonomous vehicles that can navigate complex environments safely and effectively. As the authors continue to refine and expand their techniques, it will be interesting to see how they address the remaining challenges around real-world deployment, interpretability, and explainability. Overall, this paper provides a valuable contribution to the ongoing efforts to make autonomous driving a reality.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Learning Sampling Distribution and Safety Filter for Autonomous Driving with VQ-VAE and Differentiable Optimization
Simon Idoko, Basant Sharma, Arun Kumar Singh
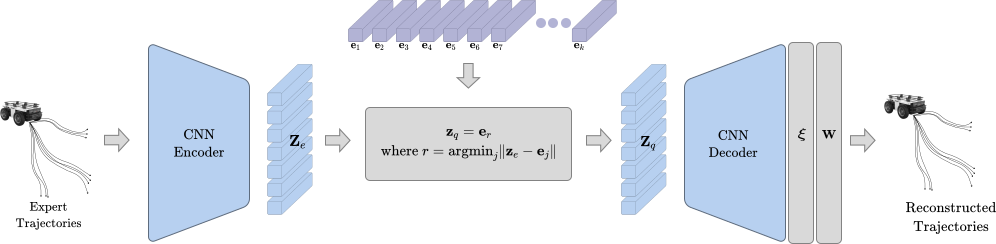
Sampling trajectories from a distribution followed by ranking them based on a specified cost function is a common approach in autonomous driving. Typically, the sampling distribution is hand-crafted (e.g a Gaussian, or a grid). Recently, there have been efforts towards learning the sampling distribution through generative models such as Conditional Variational Autoencoder (CVAE). However, these approaches fail to capture the multi-modality of the driving behaviour due to the Gaussian latent prior of the CVAE. Thus, in this paper, we re-imagine the distribution learning through vector quantized variational autoencoder (VQ-VAE), whose discrete latent-space is well equipped to capture multi-modal sampling distribution. The VQ-VAE is trained with demonstration data of optimal trajectories. We further propose a differentiable optimization based safety filter to minimally correct the VQVAE sampled trajectories to ensure collision avoidance. We use backpropagation through the optimization layers in a self-supervised learning set-up to learn good initialization and optimal parameters of the safety filter. We perform extensive comparisons with state-of-the-art CVAE-based baseline in dense and aggressive traffic scenarios and show a reduction of up to 12 times in collision-rate while being competitive in driving speeds.
Read more4/26/2024
0
CrowdSurfer: Sampling Optimization Augmented with Vector-Quantized Variational AutoEncoder for Dense Crowd Navigation
Naman Kumar, Antareep Singha, Laksh Nanwani, Dhruv Potdar, Tarun R, Fatemeh Rastgar, Simon Idoko, Arun Kumar Singh, K. Madhava Krishna
Navigation amongst densely packed crowds remains a challenge for mobile robots. The complexity increases further if the environment layout changes, making the prior computed global plan infeasible. In this paper, we show that it is possible to dramatically enhance crowd navigation by just improving the local planner. Our approach combines generative modelling with inference time optimization to generate sophisticated long-horizon local plans at interactive rates. More specifically, we train a Vector Quantized Variational AutoEncoder to learn a prior over the expert trajectory distribution conditioned on the perception input. At run-time, this is used as an initialization for a sampling-based optimizer for further refinement. Our approach does not require any sophisticated prediction of dynamic obstacles and yet provides state-of-the-art performance. In particular, we compare against the recent DRL-VO approach and show a 40% improvement in success rate and a 6% improvement in travel time.
Read more9/25/2024
0
A Safety-Oriented Self-Learning Algorithm for Autonomous Driving: Evolution Starting from a Basic Model
Shuo Yang, Caojun Wang, Zhenyu Ma, Yanjun Huang, Hong Chen
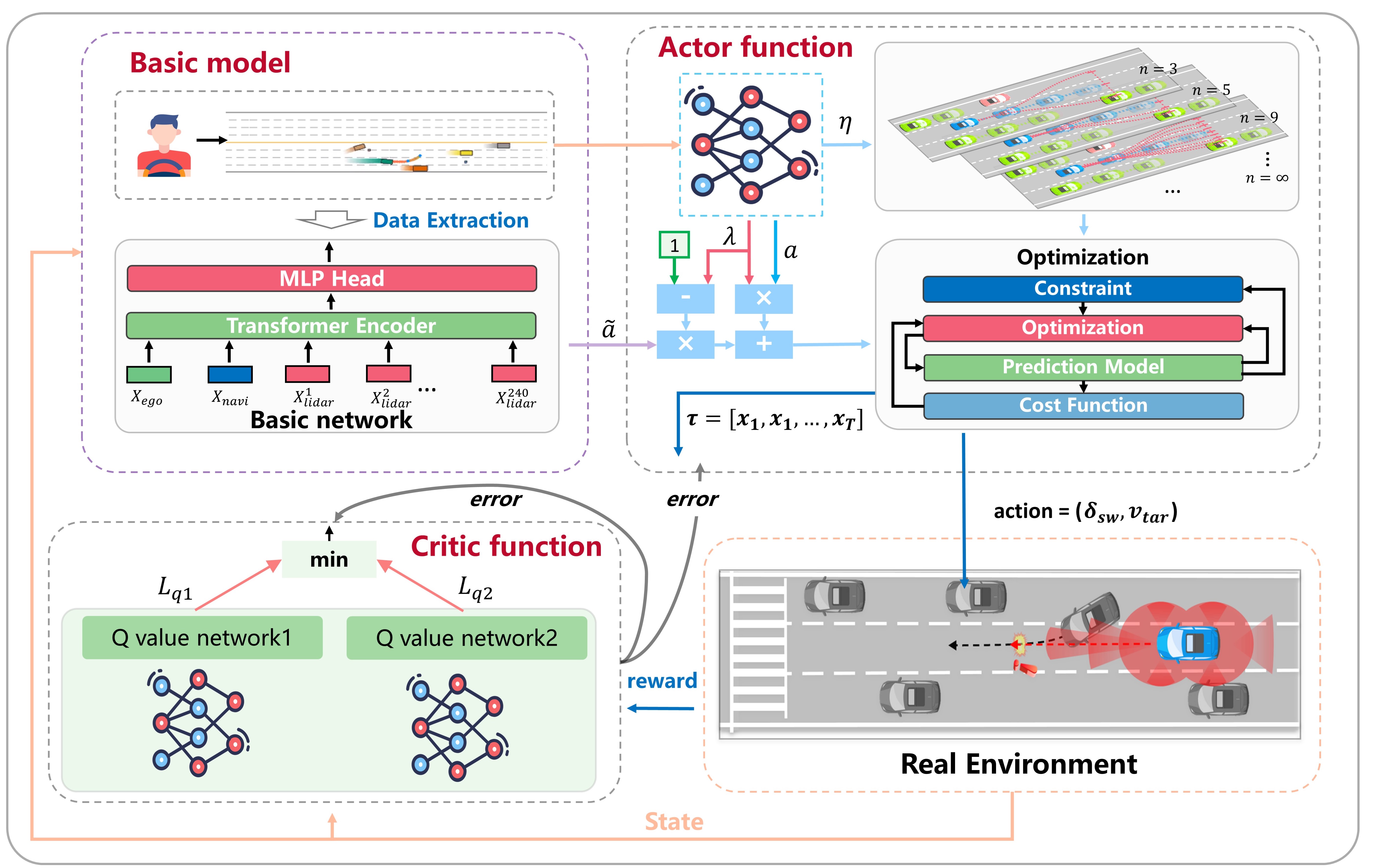
Autonomous driving vehicles with self-learning capabilities are expected to evolve in complex environments to improve their ability to cope with different scenarios. However, most self-learning algorithms suffer from low learning efficiency and lacking safety, which limits their applications. This paper proposes a safety-oriented self-learning algorithm for autonomous driving, which focuses on how to achieve evolution from a basic model. Specifically, a basic model based on the transformer encoder is designed to extract and output policy features from a small number of demonstration trajectories. To improve the learning efficiency, a policy mixed approach is developed. The basic model provides initial values to improve exploration efficiency, and the self-learning algorithm enhances the adaptability and generalization of the model, enabling continuous improvement without external intervention. Finally, an actor approximator based on receding horizon optimization is designed considering the constraints of the environmental input to ensure safety. The proposed method is verified in a challenging mixed traffic environment with pedestrians and vehicles. Simulation and real-vehicle test results show that the proposed method can safely and efficiently learn appropriate autonomous driving behaviors. Compared reinforcement learning and behavior cloning methods, it can achieve comprehensive improvement in learning efficiency and performance under the premise of ensuring safety.
Read more8/23/2024

0
Quantifying Uncertainty in Motion Prediction with Variational Bayesian Mixture
Juanwu Lu, Can Cui, Yunsheng Ma, Aniket Bera, Ziran Wang
Safety and robustness are crucial factors in developing trustworthy autonomous vehicles. One essential aspect of addressing these factors is to equip vehicles with the capability to predict future trajectories for all moving objects in the surroundings and quantify prediction uncertainties. In this paper, we propose the Sequential Neural Variational Agent (SeNeVA), a generative model that describes the distribution of future trajectories for a single moving object. Our approach can distinguish Out-of-Distribution data while quantifying uncertainty and achieving competitive performance compared to state-of-the-art methods on the Argoverse 2 and INTERACTION datasets. Specifically, a 0.446 meters minimum Final Displacement Error, a 0.203 meters minimum Average Displacement Error, and a 5.35% Miss Rate are achieved on the INTERACTION test set. Extensive qualitative and quantitative analysis is also provided to evaluate the proposed model. Our open-source code is available at https://github.com/PurdueDigitalTwin/seneva.
Read more4/8/2024