CyberCortex.AI: An AI-based Operating System for Autonomous Robotics and Complex Automation

0
Sign in to get full access
Overview
- CyberCortex.AI is an AI-based operating system designed for autonomous robotics and complex automation.
- It aims to provide a comprehensive platform for developing and deploying advanced robotic systems.
- The paper explores the system's architecture, capabilities, and potential applications.
Plain English Explanation
CyberCortex.AI is a new type of computer system that is designed to help robots and other complex machines become more autonomous and capable. Instead of relying on traditional programming, this system uses artificial intelligence (AI) to give the machines the ability to learn and make decisions on their own.
The key idea behind CyberCortex.AI is to create an operating system, which is the core software that runs a computer, that is specifically designed for robotics and automation. This means it has special features and capabilities that make it well-suited for controlling and coordinating the various components of advanced robotic systems.
For example, the AI algorithms in CyberCortex.AI could allow a robot to perceive its surroundings, understand what tasks it needs to perform, and then figure out the best way to carry them out, all without needing detailed instructions from a human. This could enable robots to operate more independently and handle a wider range of situations.
Technical Explanation
The CyberCortex.AI system is described as an AI-based operating system designed to power autonomous robotics and complex automation. It aims to provide a comprehensive platform for developing and deploying advanced robotic systems.
The system architecture includes several key components:
- A neural network-based perception and reasoning engine that allows the robot to understand its environment and make decisions
- A real-time control system for coordinating the robot's physical movements and actions
- A distributed computing framework for offloading computationally intensive tasks to the cloud
- Integrated tools and APIs for simplifying robotic application development
The authors highlight how this AI-centric approach differs from traditional robotic control systems, which tend to rely more on predefined rules and algorithms. By incorporating machine learning and other advanced AI techniques, CyberCortex.AI is intended to enable more flexible, adaptive, and autonomous behavior.
Critical Analysis
The paper provides a high-level overview of the CyberCortex.AI system, but does not delve deeply into the specific technical details or evaluation of the approach. While the authors discuss the potential benefits of an AI-powered operating system for robotics, they do not present any empirical results or performance data to substantiate the claims.
Some potential concerns that could be explored further include:
- The robustness and reliability of the AI-based perception and decision-making components, especially in complex, dynamic environments
- The scalability of the system to handle the compute and storage requirements of large-scale robotic deployments
- The safety and security implications of entrusting critical control functions to AI systems
Additionally, the authors could have discussed potential limitations or drawbacks of their approach compared to alternative robotic control architectures.
Conclusion
In summary, CyberCortex.AI represents an ambitious attempt to create an AI-powered operating system to drive the next generation of autonomous robotics and automation. While the high-level concepts seem promising, the paper lacks detailed technical evaluation and critical analysis of the approach. Further research and development would be needed to assess the viability and real-world impact of this technology.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
CyberCortex.AI: An AI-based Operating System for Autonomous Robotics and Complex Automation
Sorin Grigorescu, Mihai Zaha
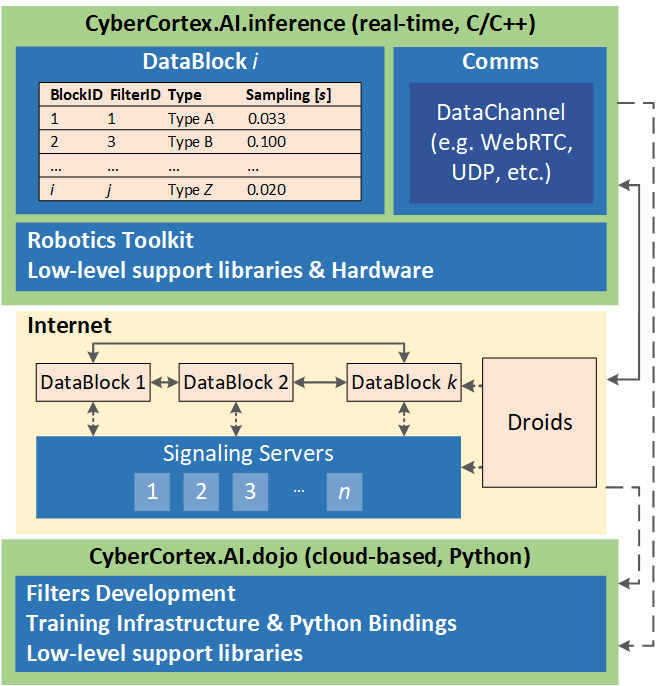
The underlying framework for controlling autonomous robots and complex automation applications are Operating Systems (OS) capable of scheduling perception-and-control tasks, as well as providing real-time data communication to other robotic peers and remote cloud computers. In this paper, we introduce CyberCortex.AI, a robotics OS designed to enable heterogeneous AI-based robotics and complex automation applications. CyberCortex.AI is a decentralized distributed OS which enables robots to talk to each other, as well as to High Performance Computers (HPC) in the cloud. Sensory and control data from the robots is streamed towards HPC systems with the purpose of training AI algorithms, which are afterwards deployed on the robots. Each functionality of a robot (e.g. sensory data acquisition, path planning, motion control, etc.) is executed within a so-called DataBlock of Filters shared through the internet, where each filter is computed either locally on the robot itself, or remotely on a different robotic system. The data is stored and accessed via a so-called textit{Temporal Addressable Memory} (TAM), which acts as a gateway between each filter's input and output. CyberCortex.AI has two main components: i) the CyberCortex.AI.inference system, which is a real-time implementation of the DataBlock running on the robots' embedded hardware, and ii) the CyberCortex.AI.dojo, which runs on an HPC computer in the cloud, and it is used to design, train and deploy AI algorithms. We present a quantitative and qualitative performance analysis of the proposed approach using two collaborative robotics applications: textit{i}) a forest fires prevention system based on an Unitree A1 legged robot and an Anafi Parrot 4K drone, as well as textit{ii}) an autonomous driving system which uses CyberCortex.AI for collaborative perception and motion control.
Read more9/4/2024

0
Cloud-based Digital Twin for Cognitive Robotics
Arthur Nied'zwiecki, Sascha Jongebloed, Yanxiang Zhan, Michaela Kumpel, Jorn Syrbe, Michael Beetz
The paper presents a novel cloud-based digital twin learning platform for teaching and training concepts of cognitive robotics. Instead of forcing interested learners or students to install a new operating system and bulky, fragile software onto their personal laptops just to solve tutorials or coding assignments of a single lecture on robotics, it would be beneficial to avoid technical setups and directly dive into the content of cognitive robotics. To achieve this, the authors utilize containerization technologies and Kubernetes to deploy and operate containerized applications, including robotics simulation environments and software collections based on the Robot operating System (ROS). The web-based Integrated Development Environment JupyterLab is integrated with RvizWeb and XPRA to provide real-time visualization of sensor data and robot behavior in a user-friendly environment for interacting with robotics software. The paper also discusses the application of the platform in teaching Knowledge Representation, Reasoning, Acquisition and Retrieval, and Task-Executives. The authors conclude that the proposed platform is a valuable tool for education and research in cognitive robotics, and that it has the potential to democratize access to these fields. The platform has already been successfully employed in various academic courses, demonstrating its effectiveness in fostering knowledge and skill development.
Read more4/22/2024

0
Operating System And Artificial Intelligence: A Systematic Review
Yifan Zhang, Xinkui Zhao, Jianwei Yin, Lufei Zhang, Zuoning Chen
In the dynamic landscape of technology, the convergence of Artificial Intelligence (AI) and Operating Systems (OS) has emerged as a pivotal arena for innovation. Our exploration focuses on the symbiotic relationship between AI and OS, emphasizing how AI-driven tools enhance OS performance, security, and efficiency, while OS advancements facilitate more sophisticated AI applications. We delve into various AI techniques employed to optimize OS functionalities, including memory management, process scheduling, and intrusion detection. Simultaneously, we analyze the role of OS in providing essential services and infrastructure that enable effective AI application execution, from resource allocation to data processing. The article also addresses challenges and future directions in this domain, emphasizing the imperative of secure and efficient AI integration within OS frameworks. By examining case studies and recent developments, our review provides a comprehensive overview of the current state of AI-OS integration, underscoring its significance in shaping the next generation of computing technologies. Finally, we explore the promising prospects of Intelligent OSes, considering not only how innovative OS architectures will pave the way for groundbreaking opportunities but also how AI will significantly contribute to advancing these next-generation OSs.
Read more7/23/2024

0
CortexCompile: Harnessing Cortical-Inspired Architectures for Enhanced Multi-Agent NLP Code Synthesis
Gautham Ramachandran, Rick Yang
Current approaches to automated code generation often rely on monolithic models that lack real-time adaptability and scalability. This limitation is particularly evident in complex programming tasks that require dynamic adjustment and efficiency. The integration of neuroscience principles into Natural Language Processing (NLP) has the potential to revolutionize automated code generation. This paper presents CortexCompile, a novel modular system inspired by the specialized functions of the human brain's cortical regions. By emulating the distinct roles of the Prefrontal Cortex, Parietal Cortex, Temporal Lobe, and Motor Cortex, CortexCompile achieves significant advancements in scalability, efficiency, and adaptability compared to traditional monolithic models like GPT-4o. The system's architecture features a Task Orchestration Agent that manages dynamic task delegation and parallel processing, facilitating the generation of highly accurate and optimized code across increasingly complex programming tasks. Experimental evaluations demonstrate that CortexCompile consistently outperforms GPT-4o in development time, accuracy, and user satisfaction, particularly in tasks involving real-time strategy games and first-person shooters. These findings underscore the viability of neuroscience-inspired architectures in addressing the limitations of current NLP models, paving the way for more efficient and human-like AI systems.
Read more9/6/2024