Cloud-based Digital Twin for Cognitive Robotics

0

Sign in to get full access
Overview
- This paper presents a cloud-based digital twin system to support cognitive robotics research and education.
- The digital twin integrates real-world robotic hardware with simulated environments, enabling remote access and collaboration.
- The system is designed to facilitate the development and testing of new robotic capabilities, as well as the creation of open educational resources for robotics.
Plain English Explanation
This research describes a new cloud-based system that combines real robotic hardware with simulated environments. This "digital twin" approach allows researchers and students to remotely access and experiment with advanced robotic technologies without needing to have the physical robots on-site.
The key idea is to create a virtual replica or "twin" of the robotic hardware and the surrounding environment. This digital twin can be used to develop and test new robotic skills and capabilities, such as Towards Robust Soft Baby Robot Rich Interaction or Embodied Agents for Efficient Exploration and Smart Scene Description. Researchers can try out different algorithms and approaches in the simulated environment before deploying them on the real robots.
Additionally, the cloud-based nature of the system allows multiple users to access and collaborate on the same robotic setup remotely. This could enable new forms of Spatial-Assisted Human-Drone Collaborative Navigation Interaction or allow the creation of Open Educational Resources for robotics education and training.
The goal is to make advanced robotic technologies more accessible and affordable for researchers, educators, and students, while also facilitating the development of new robotic capabilities through this cloud-based digital twin approach.
Technical Explanation
The paper presents a cloud-based digital twin system designed to support cognitive robotics research and education. The system integrates real-world robotic hardware with simulated environments, enabling remote access and collaboration.
The digital twin architecture consists of several key components:
- Robotic hardware: The system includes various robotic platforms, such as manipulators and mobile robots, that are connected to the cloud.
- Simulation environment: A virtual representation of the robotic hardware and its surrounding environment is created using ROS and Gazebo simulations.
- Cloud infrastructure: The digital twin is hosted on a cloud platform, providing users with remote access and the ability to collaborate on experiments.
- User interface: A web-based interface allows users to interact with the digital twin, control the robotic hardware, and monitor experiments.
The researchers demonstrate the capabilities of the digital twin system through several use cases, including the development and testing of new robotic skills, such as Learning to Fly in Seconds, and the creation of open educational resources for robotics education.
Critical Analysis
The paper presents a promising approach to leveraging cloud-based digital twins for cognitive robotics research and education. The integration of real-world robotic hardware with simulated environments offers several benefits, including increased accessibility, remote collaboration, and the ability to develop and test new robotic capabilities in a safe and controlled environment.
However, the paper does not address the potential challenges and limitations of this approach. For instance, the fidelity of the simulated environments and their ability to accurately represent real-world dynamics and interactions may be a concern. Additionally, the scalability of the cloud-based infrastructure and its ability to handle multiple concurrent users and high-fidelity simulations could be an area for further investigation.
Furthermore, the paper does not delve into the potential ethical and privacy implications of a cloud-based system that provides remote access to robotic hardware. Considerations around data security, user authentication, and the responsible use of these technologies should be explored in future work.
Despite these potential issues, the cloud-based digital twin approach presented in this paper holds significant promise for advancing cognitive robotics research and education. By making advanced robotic technologies more accessible and facilitating collaborative development, this system could contribute to the broader adoption and exploration of Spatial-Assisted Human-Drone Collaborative Navigation Interaction and other cutting-edge robotic capabilities.
Conclusion
This paper introduces a cloud-based digital twin system for cognitive robotics research and education. The system integrates real-world robotic hardware with simulated environments, enabling remote access and collaboration among researchers, educators, and students.
The key advantages of this approach include increased accessibility to advanced robotic technologies, the ability to develop and test new robotic capabilities in a simulated environment, and the potential for creating open educational resources for robotics training. By leveraging cloud-based infrastructure, the digital twin system aims to make robotic research and education more accessible and scalable.
While the paper highlights the promising capabilities of this technology, it also raises questions about the technical limitations, ethical considerations, and potential challenges that should be addressed in future work. Overall, the cloud-based digital twin concept presented in this research represents an intriguing step towards democratizing access to cutting-edge robotic technologies and fostering innovation in the field of cognitive robotics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Cloud-based Digital Twin for Cognitive Robotics
Arthur Nied'zwiecki, Sascha Jongebloed, Yanxiang Zhan, Michaela Kumpel, Jorn Syrbe, Michael Beetz
The paper presents a novel cloud-based digital twin learning platform for teaching and training concepts of cognitive robotics. Instead of forcing interested learners or students to install a new operating system and bulky, fragile software onto their personal laptops just to solve tutorials or coding assignments of a single lecture on robotics, it would be beneficial to avoid technical setups and directly dive into the content of cognitive robotics. To achieve this, the authors utilize containerization technologies and Kubernetes to deploy and operate containerized applications, including robotics simulation environments and software collections based on the Robot operating System (ROS). The web-based Integrated Development Environment JupyterLab is integrated with RvizWeb and XPRA to provide real-time visualization of sensor data and robot behavior in a user-friendly environment for interacting with robotics software. The paper also discusses the application of the platform in teaching Knowledge Representation, Reasoning, Acquisition and Retrieval, and Task-Executives. The authors conclude that the proposed platform is a valuable tool for education and research in cognitive robotics, and that it has the potential to democratize access to these fields. The platform has already been successfully employed in various academic courses, demonstrating its effectiveness in fostering knowledge and skill development.
Read more4/22/2024
0
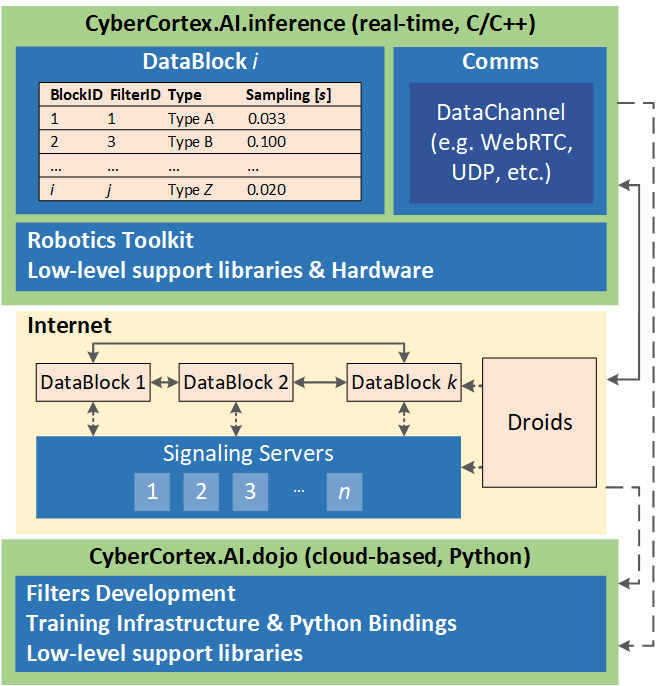
CyberCortex.AI: An AI-based Operating System for Autonomous Robotics and Complex Automation
Sorin Grigorescu, Mihai Zaha
The underlying framework for controlling autonomous robots and complex automation applications are Operating Systems (OS) capable of scheduling perception-and-control tasks, as well as providing real-time data communication to other robotic peers and remote cloud computers. In this paper, we introduce CyberCortex.AI, a robotics OS designed to enable heterogeneous AI-based robotics and complex automation applications. CyberCortex.AI is a decentralized distributed OS which enables robots to talk to each other, as well as to High Performance Computers (HPC) in the cloud. Sensory and control data from the robots is streamed towards HPC systems with the purpose of training AI algorithms, which are afterwards deployed on the robots. Each functionality of a robot (e.g. sensory data acquisition, path planning, motion control, etc.) is executed within a so-called DataBlock of Filters shared through the internet, where each filter is computed either locally on the robot itself, or remotely on a different robotic system. The data is stored and accessed via a so-called textit{Temporal Addressable Memory} (TAM), which acts as a gateway between each filter's input and output. CyberCortex.AI has two main components: i) the CyberCortex.AI.inference system, which is a real-time implementation of the DataBlock running on the robots' embedded hardware, and ii) the CyberCortex.AI.dojo, which runs on an HPC computer in the cloud, and it is used to design, train and deploy AI algorithms. We present a quantitative and qualitative performance analysis of the proposed approach using two collaborative robotics applications: textit{i}) a forest fires prevention system based on an Unitree A1 legged robot and an Anafi Parrot 4K drone, as well as textit{ii}) an autonomous driving system which uses CyberCortex.AI for collaborative perception and motion control.
Read more9/4/2024

0
RoboTwin: Dual-Arm Robot Benchmark with Generative Digital Twins (early version)
Yao Mu, Tianxing Chen, Shijia Peng, Zanxin Chen, Zeyu Gao, Yude Zou, Lunkai Lin, Zhiqiang Xie, Ping Luo
Effective collaboration of dual-arm robots and their tool use capabilities are increasingly important areas in the advancement of robotics. These skills play a significant role in expanding robots' ability to operate in diverse real-world environments. However, progress is impeded by the scarcity of specialized training data. This paper introduces RoboTwin, a novel benchmark dataset combining real-world teleoperated data with synthetic data from digital twins, designed for dual-arm robotic scenarios. Using the COBOT Magic platform, we have collected diverse data on tool usage and human-robot interaction. We present a innovative approach to creating digital twins using AI-generated content, transforming 2D images into detailed 3D models. Furthermore, we utilize large language models to generate expert-level training data and task-specific pose sequences oriented toward functionality. Our key contributions are: 1) the RoboTwin benchmark dataset, 2) an efficient real-to-simulation pipeline, and 3) the use of language models for automatic expert-level data generation. These advancements are designed to address the shortage of robotic training data, potentially accelerating the development of more capable and versatile robotic systems for a wide range of real-world applications. The project page is available at https://robotwin-benchmark.github.io/early-version/
Read more9/5/2024
🗣️
0
Exploring 6G Potential for Industrial Digital Twinning and Swarm Intelligence in Obstacle-Rich
Siyu Yuan, Khurshid Alam, Bin Han, Dennis Krummacker, Hans D. Schotten
With the advent of 6G technology, the demand for efficient and intelligent systems in industrial applications has surged, driving the need for advanced solutions in target localization. Utilizing swarm robots to locate unknown targets involves navigating increasingly complex environments. Digital Twinning (DT) offers a robust solution by creating a virtual replica of the physical world, which enhances the swarm's navigation capabilities. Our framework leverages DT and integrates Swarm Intelligence to store physical map information in the cloud, enabling robots to efficiently locate unknown targets. The simulation results demonstrate that the DT framework, augmented by Swarm Intelligence, significantly improves target location efficiency in obstacle-rich environments compared to traditional methods. This research underscores the potential of combining DT and Swarm Intelligence to advance the field of robotic navigation and target localization in complex industrial settings.
Read more7/1/2024