Data-Driven Dynamics Modeling of Miniature Robotic Blimps Using Neural ODEs With Parameter Auto-Tuning

0

Sign in to get full access
Overview
- Data-driven dynamics modeling of miniature robotic blimps using neural ordinary differential equations (ODEs) with parameter auto-tuning
- Leverages the flexibility and expressiveness of neural ODEs to capture complex blimp dynamics
- Automatic parameter tuning mechanism to optimize the neural ODE model for accurate predictions
Plain English Explanation
This research paper presents a data-driven approach for modeling the dynamics of miniature robotic blimps using neural ordinary differential equations (ODEs) with automatic parameter tuning. Robotic blimps, which are small, helium-filled airships, can be challenging to model due to their complex and nonlinear dynamics.
The researchers address this challenge by using neural ODEs, a powerful machine learning technique that can capture intricate relationships between variables. Unlike traditional first-principle-based models, which rely on mathematical equations derived from physical principles, the neural ODE model learns the dynamics directly from the data, allowing it to better represent the nuances of blimp behavior.
A key aspect of this work is the automatic parameter tuning mechanism, which optimizes the neural ODE model to make accurate predictions. This auto-tuning process helps overcome the difficulty of manually selecting the right parameters for the model, a common challenge in traditional modeling approaches.
The researchers demonstrate the effectiveness of their data-driven dynamics modeling technique through experiments on a real miniature robotic blimp. By leveraging the flexibility and expressiveness of neural ODEs, this work advances the field of robotic blimp control and navigation, potentially enabling more agile and autonomous blimp-based systems.
Technical Explanation
The researchers propose a data-driven approach to model the dynamics of miniature robotic blimps using neural ordinary differential equations (ODEs) with an automatic parameter tuning mechanism.
The core of their method is the use of neural ODEs, which can learn complex dynamics directly from data, rather than relying on traditional first-principle-based models. Neural ODEs are a powerful machine learning technique that can capture the intricate relationships between the blimp's state variables, such as position, velocity, and orientation, and the control inputs, such as thrust and rudder angles.
To optimize the neural ODE model for accurate predictions, the researchers employ an automatic parameter tuning mechanism. This auto-tuning process adjusts the model parameters to best fit the observed data, circumventing the challenge of manually selecting the appropriate parameters, which is a common issue in traditional modeling approaches.
The researchers validate their data-driven dynamics modeling technique through experiments on a real miniature robotic blimp. They compare the performance of the neural ODE model against a first-principle-based model, demonstrating the neural ODE's superior ability to capture the complex nonlinear dynamics of the blimp.
This work advances the field of robotic blimp control and navigation, as the data-driven dynamics modeling approach can enable more agile and autonomous blimp-based systems. The automatic parameter tuning mechanism also has broader applications in the optimization of guidance and control networks for various robotic systems.
Critical Analysis
The researchers have presented a compelling data-driven approach for modeling the dynamics of miniature robotic blimps using neural ODEs with automatic parameter tuning. The use of neural ODEs is a promising technique, as it can capture complex nonlinear relationships that may be difficult to represent using traditional first-principle-based models.
The automatic parameter tuning mechanism is a key strength of this work, as it addresses a common challenge in model development. By optimizing the model parameters to fit the observed data, the researchers have demonstrated the ability to achieve accurate predictions, which is crucial for effective blimp control and navigation.
However, the paper does not provide detailed information on the sensitivity of the neural ODE model to the quality and quantity of the training data. It would be valuable to understand how the model's performance may be affected by factors such as measurement noise, data sparsity, or changes in the blimp's physical characteristics over time.
[Additionally, the researchers could explore the potential of their approach to learn the governing equations of unobserved states in dynamical systems, which could further expand the capabilities of their data-driven modeling technique.
Conclusion
This research paper presents a data-driven approach for modeling the dynamics of miniature robotic blimps using neural ordinary differential equations (ODEs) with automatic parameter tuning. By leveraging the flexibility and expressiveness of neural ODEs, the researchers have developed a modeling technique that can capture the complex nonlinear behavior of robotic blimps more effectively than traditional first-principle-based models.
The automatic parameter tuning mechanism is a key innovation that addresses a common challenge in model development, enabling the neural ODE model to be optimized for accurate predictions. This data-driven dynamics modeling approach has the potential to enable more agile and autonomous blimp-based systems, advancing the field of robotic blimp control and navigation.
[Future research could explore the sensitivity of the neural ODE model to data quality and quantity, as well as investigate the potential to learn the governing equations of unobserved states in dynamical systems, further expanding the capabilities of this data-driven modeling technique.](https://aimodels.fyi/papers/arxiv/pid-tuning-using-cross-entropy-deep-learning)
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Data-Driven Dynamics Modeling of Miniature Robotic Blimps Using Neural ODEs With Parameter Auto-Tuning
Yongjian Zhu, Hao Cheng, Feitian Zhang
Miniature robotic blimps, as one type of lighter-than-air aerial vehicles, have attracted increasing attention in the science and engineering community for their enhanced safety, extended endurance, and quieter operation compared to quadrotors. Accurately modeling the dynamics of these robotic blimps poses a significant challenge due to the complex aerodynamics stemming from their large lifting bodies. Traditional first-principle models have difficulty obtaining accurate aerodynamic parameters and often overlook high-order nonlinearities, thus coming to its limit in modeling the motion dynamics of miniature robotic blimps. To tackle this challenge, this letter proposes the Auto-tuning Blimp-oriented Neural Ordinary Differential Equation method (ABNODE), a data-driven approach that integrates first-principle and neural network modeling. Spiraling motion experiments of robotic blimps are conducted, comparing the ABNODE with first-principle and other data-driven benchmark models, the results of which demonstrate the effectiveness of the proposed method.
Read more4/30/2024

0
Knowledge-based Neural Ordinary Differential Equations for Cosserat Rod-based Soft Robots
Tom Z. Jiahao, Ryan Adolf, Cynthia Sung, M. Ani Hsieh
Soft robots have many advantages over rigid robots thanks to their compliant and passive nature. However, it is generally challenging to model the dynamics of soft robots due to their high spatial dimensionality, making it difficult to use model-based methods to accurately control soft robots. It often requires direct numerical simulation of partial differential equations to simulate soft robots. This not only requires an accurate numerical model, but also makes soft robot modeling slow and expensive. Deep learning algorithms have shown promises in data-driven modeling of soft robots. However, these algorithms usually require a large amount of data, which are difficult to obtain in either simulation or real-world experiments of soft robots. In this work, we propose KNODE-Cosserat, a framework that combines first-principle physics models and neural ordinary differential equations. We leverage the best from both worlds -- the generalization ability of physics-based models and the fast speed of deep learning methods. We validate our framework in both simulation and real-world experiments. In both cases, we show that the robot model significantly improves over the baseline models under different metrics.
Read more9/26/2024
0
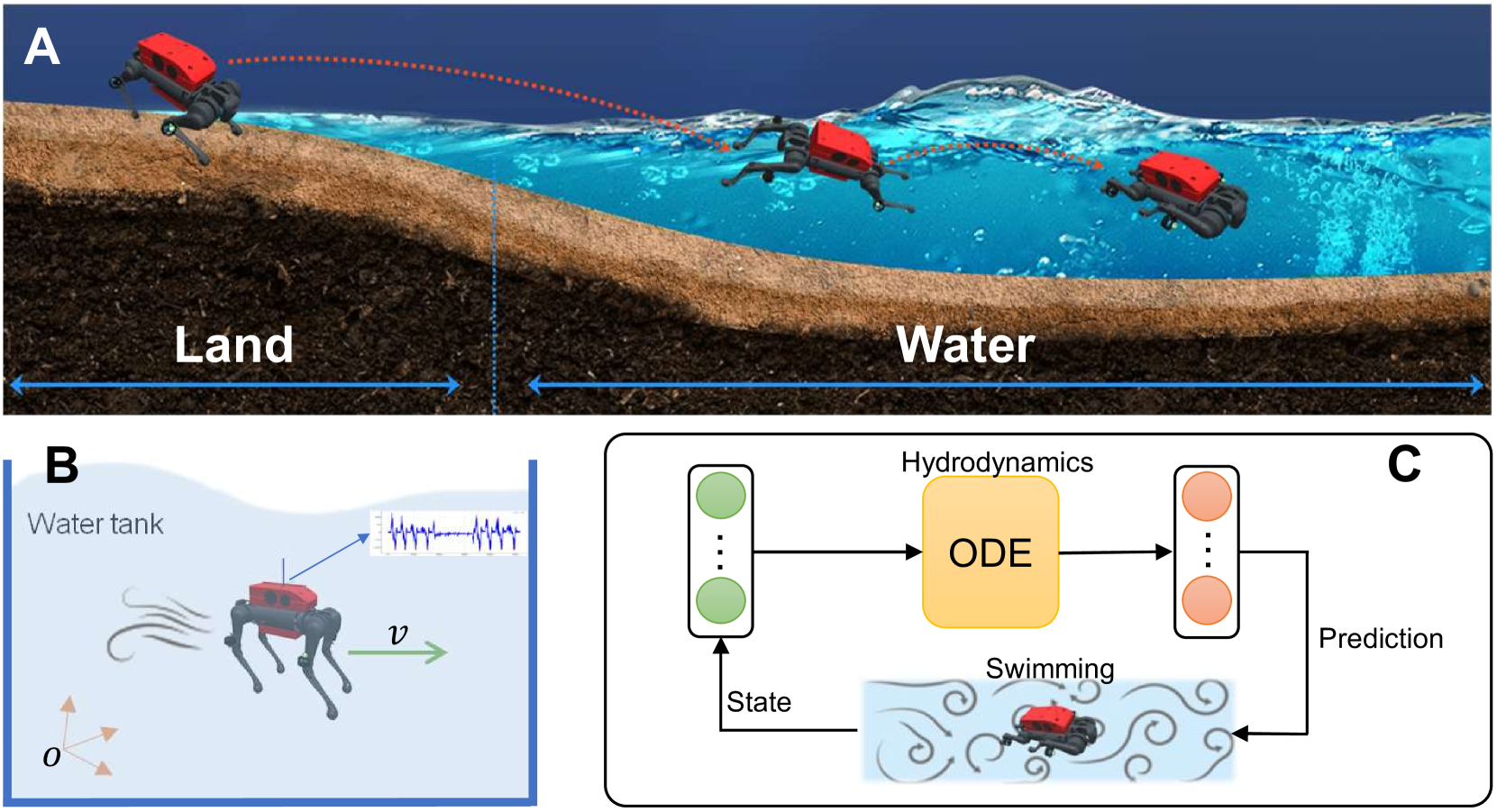
New!Learning Adaptive Hydrodynamic Models Using Neural ODEs in Complex Conditions
Cong Wang, Aoming Liang, Fei Han, Xinyu Zeng, Zhibin Li, Dixia Fan, Jens Kober
Reinforcement learning-based quadruped robots excel across various terrains but still lack the ability to swim in water due to the complex underwater environment. This paper presents the development and evaluation of a data-driven hydrodynamic model for amphibious quadruped robots, aiming to enhance their adaptive capabilities in complex and dynamic underwater environments. The proposed model leverages Neural Ordinary Differential Equations (ODEs) combined with attention mechanisms to accurately process and interpret real-time sensor data. The model enables the quadruped robots to understand and predict complex environmental patterns, facilitating robust decision-making strategies. We harness real-time sensor data, capturing various environmental and internal state parameters to train and evaluate our model. A significant focus of our evaluation involves testing the quadruped robot's performance across different hydrodynamic conditions and assessing its capabilities at varying speeds and fluid dynamic conditions. The outcomes suggest that the model can effectively learn and adapt to varying conditions, enabling the prediction of force states and enhancing autonomous robotic behaviors in various practical scenarios.
Read more10/2/2024
❗
0
Neural-Fly Enables Rapid Learning for Agile Flight in Strong Winds
Michael O'Connell, Guanya Shi, Xichen Shi, Kamyar Azizzadenesheli, Anima Anandkumar, Yisong Yue, Soon-Jo Chung
Executing safe and precise flight maneuvers in dynamic high-speed winds is important for the ongoing commoditization of uninhabited aerial vehicles (UAVs). However, because the relationship between various wind conditions and its effect on aircraft maneuverability is not well understood, it is challenging to design effective robot controllers using traditional control design methods. We present Neural-Fly, a learning-based approach that allows rapid online adaptation by incorporating pretrained representations through deep learning. Neural-Fly builds on two key observations that aerodynamics in different wind conditions share a common representation and that the wind-specific part lies in a low-dimensional space. To that end, Neural-Fly uses a proposed learning algorithm, domain adversarially invariant meta-learning (DAIML), to learn the shared representation, only using 12 minutes of flight data. With the learned representation as a basis, Neural-Fly then uses a composite adaptation law to update a set of linear coefficients for mixing the basis elements. When evaluated under challenging wind conditions generated with the Caltech Real Weather Wind Tunnel, with wind speeds up to 43.6 kilometers/hour (12.1 meters/second), Neural-Fly achieves precise flight control with substantially smaller tracking error than state-of-the-art nonlinear and adaptive controllers. In addition to strong empirical performance, the exponential stability of Neural-Fly results in robustness guarantees. Last, our control design extrapolates to unseen wind conditions, is shown to be effective for outdoor flights with only onboard sensors, and can transfer across drones with minimal performance degradation.
Read more4/15/2024