A Dataset for Crucial Object Recognition in Blind and Low-Vision Individuals' Navigation

0
Sign in to get full access
Overview
- This paper introduces a new dataset for object recognition in the context of navigation for blind and low-vision individuals.
- The dataset contains annotated images of crucial objects that are important for safe and effective navigation.
- The goal is to improve computer vision models to better assist blind and low-vision users in their everyday navigation tasks.
Plain English Explanation
The researchers created a new dataset to help computers better recognize important objects that blind and low-vision people need to identify during navigation. These could be things like curbs, stairs, or other obstacles.
The dataset contains annotated images of these crucial objects, which means the objects are clearly labeled so computer vision models can learn to identify them. The researchers hope this will lead to improved navigation assistance for people with visual impairments, allowing them to move around more safely and independently.
This is an important problem because current computer vision systems often struggle to reliably detect the specific objects that are most essential for blind and low-vision navigation. The new dataset aims to address this gap and advance the state of the art in this assistive technology area.
Technical Explanation
The paper introduces a new dataset called Crucial Object Navigation Dataset (CON-Dataset) that contains annotated images of objects crucial for navigation by blind and low-vision individuals. The dataset includes a variety of common objects like stairs, curbs, doors, and other obstacles or landmarks.
Each image in the dataset is annotated to indicate the location and type of the crucial object it contains. This allows computer vision models to be trained to recognize these specific objects, which is an important capability for navigation assistance systems.
The researchers collected the dataset by capturing images in real-world indoor and outdoor environments frequented by blind and low-vision individuals. They used a diverse set of camera perspectives and lighting conditions to create a robust dataset.
To evaluate the usefulness of the dataset, the paper reports on experiments where several state-of-the-art object detection models were trained and tested on the CON-Dataset. The results show that the models were able to achieve good performance in detecting the crucial objects, demonstrating the value of the dataset for advancing this area of research.
Critical Analysis
The paper provides a well-designed dataset that addresses an important problem in assistive technology for the blind and low-vision community. The careful curation of the dataset and the thorough evaluation of its usefulness are strengths of the work.
However, the paper does not discuss potential limitations of the dataset, such as the diversity of environments or the completeness of the object categories included. It would be helpful for the authors to acknowledge these types of caveats.
Additionally, the paper could be strengthened by considering potential biases in the dataset, such as geographic or demographic biases in the data collection process. Addressing these kinds of issues is crucial for ensuring the fairness and inclusiveness of the resulting AI systems.
Overall, this is a promising step forward in developing better computer vision capabilities for assisting blind and low-vision individuals, but further research is needed to fully realize the potential of this technology.
Conclusion
This paper presents a new dataset called the Crucial Object Navigation Dataset (CON-Dataset) that is specifically designed to improve object recognition for blind and low-vision navigation. The annotated images in the dataset cover a range of crucial objects that are essential for safe and effective navigation.
The evaluation results demonstrate the value of the dataset for training computer vision models to detect these important objects. This represents an important step towards developing more capable navigation assistance systems for individuals with visual impairments.
While the paper has some limitations in its analysis, the CON-Dataset is a valuable contribution that can advance research and development in this crucial area of assistive technology. Further work is needed to address potential biases and expand the scope of the dataset, but this paper lays a strong foundation for future progress.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A Dataset for Crucial Object Recognition in Blind and Low-Vision Individuals' Navigation
Md Touhidul Islam, Imran Kabir, Elena Ariel Pearce, Md Alimoor Reza, Syed Masum Billah
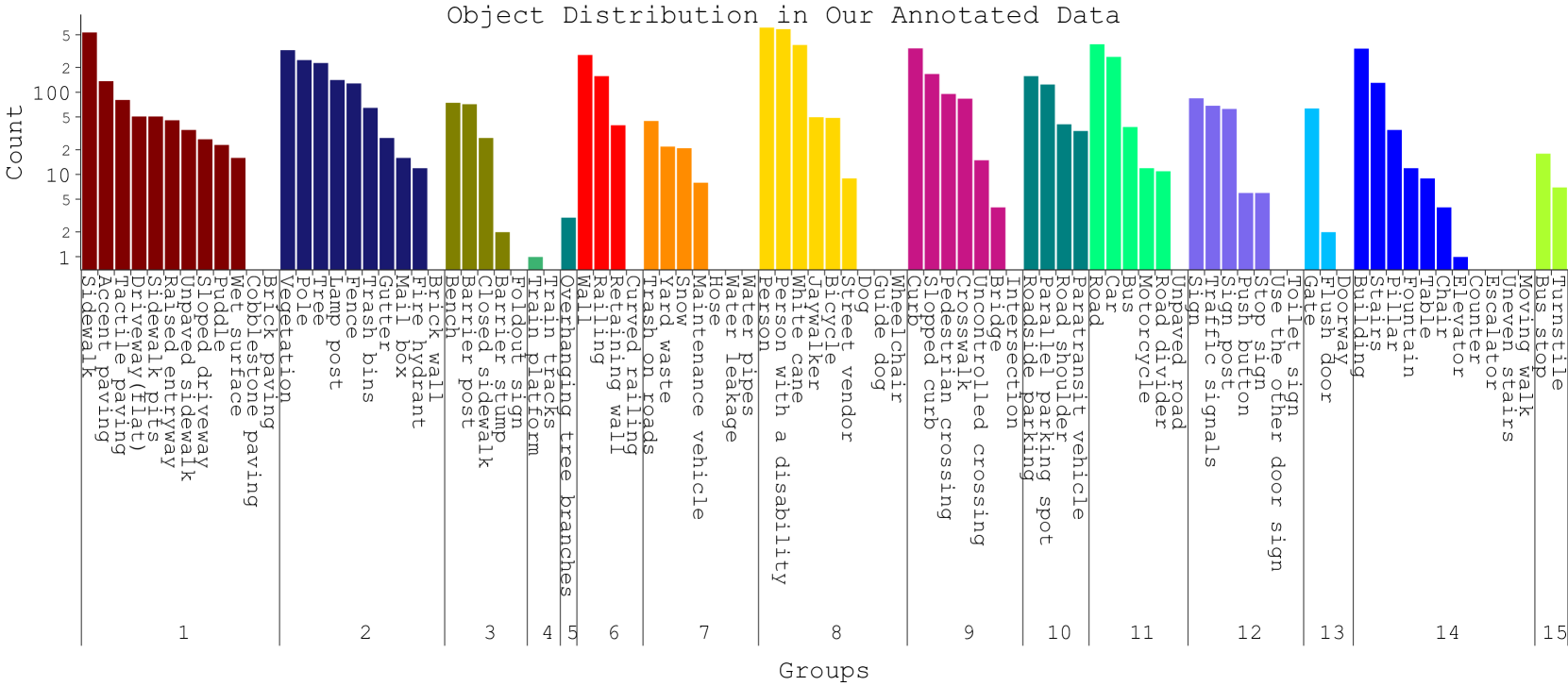
This paper introduces a dataset for improving real-time object recognition systems to aid blind and low-vision (BLV) individuals in navigation tasks. The dataset comprises 21 videos of BLV individuals navigating outdoor spaces, and a taxonomy of 90 objects crucial for BLV navigation, refined through a focus group study. We also provide object labeling for the 90 objects across 31 video segments created from the 21 videos. A deeper analysis reveals that most contemporary datasets used in training computer vision models contain only a small subset of the taxonomy in our dataset. Preliminary evaluation of state-of-the-art computer vision models on our dataset highlights shortcomings in accurately detecting key objects relevant to BLV navigation, emphasizing the need for specialized datasets. We make our dataset publicly available, offering valuable resources for developing more inclusive navigation systems for BLV individuals.
Read more7/25/2024

0
Identifying Crucial Objects in Blind and Low-Vision Individuals' Navigation
Md Touhidul Islam, Imran Kabir, Elena Ariel Pearce, Md Alimoor Reza, Syed Masum Billah
This paper presents a curated list of 90 objects essential for the navigation of blind and low-vision (BLV) individuals, encompassing road, sidewalk, and indoor environments. We develop the initial list by analyzing 21 publicly available videos featuring BLV individuals navigating various settings. Then, we refine the list through feedback from a focus group study involving blind, low-vision, and sighted companions of BLV individuals. A subsequent analysis reveals that most contemporary datasets used to train recent computer vision models contain only a small subset of the objects in our proposed list. Furthermore, we provide detailed object labeling for these 90 objects across 31 video segments derived from the original 21 videos. Finally, we make the object list, the 21 videos, and object labeling in the 31 video segments publicly available. This paper aims to fill the existing gap and foster the development of more inclusive and effective navigation aids for the BLV community.
Read more8/26/2024

0
Generating Contextually-Relevant Navigation Instructions for Blind and Low Vision People
Zain Merchant, Abrar Anwar, Emily Wang, Souti Chattopadhyay, Jesse Thomason
Navigating unfamiliar environments presents significant challenges for blind and low-vision (BLV) individuals. In this work, we construct a dataset of images and goals across different scenarios such as searching through kitchens or navigating outdoors. We then investigate how grounded instruction generation methods can provide contextually-relevant navigational guidance to users in these instances. Through a sighted user study, we demonstrate that large pretrained language models can produce correct and useful instructions perceived as beneficial for BLV users. We also conduct a survey and interview with 4 BLV users and observe useful insights on preferences for different instructions based on the scenario.
Read more7/12/2024
📈
0
A Multi-Modal Foundation Model to Assist People with Blindness and Low Vision in Environmental Interaction
Yu Hao, Fan Yang, Hao Huang, Shuaihang Yuan, Sundeep Rangan, John-Ross Rizzo, Yao Wang, Yi Fang
People with blindness and low vision (pBLV) encounter substantial challenges when it comes to comprehensive scene recognition and precise object identification in unfamiliar environments. Additionally, due to the vision loss, pBLV have difficulty in accessing and identifying potential tripping hazards on their own. In this paper, we present a pioneering approach that leverages a large vision-language model to enhance visual perception for pBLV, offering detailed and comprehensive descriptions of the surrounding environments and providing warnings about the potential risks. Our method begins by leveraging a large image tagging model (i.e., Recognize Anything (RAM)) to identify all common objects present in the captured images. The recognition results and user query are then integrated into a prompt, tailored specifically for pBLV using prompt engineering. By combining the prompt and input image, a large vision-language model (i.e., InstructBLIP) generates detailed and comprehensive descriptions of the environment and identifies potential risks in the environment by analyzing the environmental objects and scenes, relevant to the prompt. We evaluate our approach through experiments conducted on both indoor and outdoor datasets. Our results demonstrate that our method is able to recognize objects accurately and provide insightful descriptions and analysis of the environment for pBLV.
Read more4/30/2024