A Multi-Modal Foundation Model to Assist People with Blindness and Low Vision in Environmental Interaction

0
📈
Sign in to get full access
Overview
- The paper presents a pioneering approach that leverages a large vision-language model to enhance visual perception for people with blindness and low vision (pBLV).
- The method uses a large image tagging model to identify objects in captured images, which are then integrated into a prompt tailored for pBLV.
- A large vision-language model then generates detailed and comprehensive descriptions of the environment and identifies potential risks, such as tripping hazards.
- The method is evaluated on both indoor and outdoor datasets, demonstrating its ability to recognize objects accurately and provide insightful descriptions for pBLV.
Plain English Explanation
People with blindness and low vision (pBLV) often struggle to fully understand their surroundings and identify potential hazards. This paper presents a new approach that aims to address these challenges by using advanced artificial intelligence (AI) models.
The key idea is to combine two powerful AI technologies: image recognition and language understanding. First, a large image tagging model is used to identify all the common objects present in the captured images. Then, this information is combined with the user's specific questions or needs, and a large vision-language model is used to generate detailed descriptions of the environment and warn about potential risks, such as tripping hazards.
Imagine you are a person with low vision trying to navigate an unfamiliar outdoor environment. The system would first analyze the scene and identify objects like trees, benches, and uneven pavement. It would then use this information to provide you with a comprehensive description of your surroundings, highlighting any potential obstacles or hazards that you should be aware of. This could help you move through the environment more safely and confidently.
The researchers evaluated this approach on both indoor and outdoor datasets, and the results show that it can accurately recognize objects and provide valuable insights to people with vision impairments. This is an exciting development that could significantly improve the quality of life for many individuals.
Technical Explanation
The paper presents a novel approach that leverages a large vision-language model to enhance visual perception for people with blindness and low vision (pBLV). The method begins by using a large image tagging model, known as Recognize Anything (RAM), to identify all the common objects present in the captured images.
The recognition results and the user's specific query or needs are then integrated into a prompt that is tailored for pBLV using prompt engineering techniques. By combining this tailored prompt and the input image, a large vision-language model called InstructBLIP generates detailed and comprehensive descriptions of the environment. The model also identifies potential risks, such as tripping hazards, by analyzing the environmental objects and scenes relevant to the prompt.
The researchers evaluated their approach on both indoor and outdoor datasets, demonstrating its ability to recognize objects accurately and provide insightful descriptions and analysis of the environment for pBLV. This work builds upon recent advancements in large multimodal language models and their applications in assistive technologies for individuals with visual impairments.
Critical Analysis
The paper presents a promising approach to enhancing visual perception for people with blindness and low vision, but there are a few potential limitations and areas for further research:
-
The evaluation is limited to the specific indoor and outdoor datasets used in the study. It would be important to test the system's performance on a wider range of environments and scenarios to ensure its robustness.
-
The paper does not provide detailed information on the specific prompt engineering techniques used to tailor the prompts for pBLV. More transparency in this area could help other researchers build upon this work.
-
While the system can provide detailed descriptions of the environment, it is unclear how effectively these descriptions can be communicated to users in a practical, real-world setting. Integrating the system with accessible interfaces or assistive technologies may be an important next step.
-
The paper does not address potential ethical concerns, such as the privacy implications of capturing and analyzing images in public spaces. These types of considerations should be carefully considered as the technology is further developed and deployed.
Overall, the research presented in this paper is a promising step forward in enhancing visual perception for people with blindness and low vision. However, continued development and careful consideration of the potential limitations and ethical implications will be crucial as this technology matures.
Conclusion
This paper introduces a novel approach that leverages large vision-language models to significantly improve visual perception for people with blindness and low vision. By combining advanced image recognition and language understanding capabilities, the system can provide detailed descriptions of the surrounding environment and identify potential hazards, offering users valuable insights to navigate unfamiliar spaces more safely and confidently.
The evaluation results demonstrate the effectiveness of this method in both indoor and outdoor settings, suggesting that it could have a meaningful impact on the quality of life for many individuals with visual impairments. As the field of assistive technology continues to evolve, this research represents an important step forward in harnessing the power of AI to enhance accessibility and inclusion.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📈
0
A Multi-Modal Foundation Model to Assist People with Blindness and Low Vision in Environmental Interaction
Yu Hao, Fan Yang, Hao Huang, Shuaihang Yuan, Sundeep Rangan, John-Ross Rizzo, Yao Wang, Yi Fang
People with blindness and low vision (pBLV) encounter substantial challenges when it comes to comprehensive scene recognition and precise object identification in unfamiliar environments. Additionally, due to the vision loss, pBLV have difficulty in accessing and identifying potential tripping hazards on their own. In this paper, we present a pioneering approach that leverages a large vision-language model to enhance visual perception for pBLV, offering detailed and comprehensive descriptions of the surrounding environments and providing warnings about the potential risks. Our method begins by leveraging a large image tagging model (i.e., Recognize Anything (RAM)) to identify all common objects present in the captured images. The recognition results and user query are then integrated into a prompt, tailored specifically for pBLV using prompt engineering. By combining the prompt and input image, a large vision-language model (i.e., InstructBLIP) generates detailed and comprehensive descriptions of the environment and identifies potential risks in the environment by analyzing the environmental objects and scenes, relevant to the prompt. We evaluate our approach through experiments conducted on both indoor and outdoor datasets. Our results demonstrate that our method is able to recognize objects accurately and provide insightful descriptions and analysis of the environment for pBLV.
Read more4/30/2024

0
Generating Contextually-Relevant Navigation Instructions for Blind and Low Vision People
Zain Merchant, Abrar Anwar, Emily Wang, Souti Chattopadhyay, Jesse Thomason
Navigating unfamiliar environments presents significant challenges for blind and low-vision (BLV) individuals. In this work, we construct a dataset of images and goals across different scenarios such as searching through kitchens or navigating outdoors. We then investigate how grounded instruction generation methods can provide contextually-relevant navigational guidance to users in these instances. Through a sighted user study, we demonstrate that large pretrained language models can produce correct and useful instructions perceived as beneficial for BLV users. We also conduct a survey and interview with 4 BLV users and observe useful insights on preferences for different instructions based on the scenario.
Read more7/12/2024

0
Vision-Language Models under Cultural and Inclusive Considerations
Antonia Karamolegkou, Phillip Rust, Yong Cao, Ruixiang Cui, Anders S{o}gaard, Daniel Hershcovich
Large vision-language models (VLMs) can assist visually impaired people by describing images from their daily lives. Current evaluation datasets may not reflect diverse cultural user backgrounds or the situational context of this use case. To address this problem, we create a survey to determine caption preferences and propose a culture-centric evaluation benchmark by filtering VizWiz, an existing dataset with images taken by people who are blind. We then evaluate several VLMs, investigating their reliability as visual assistants in a culturally diverse setting. While our results for state-of-the-art models are promising, we identify challenges such as hallucination and misalignment of automatic evaluation metrics with human judgment. We make our survey, data, code, and model outputs publicly available.
Read more7/9/2024
0
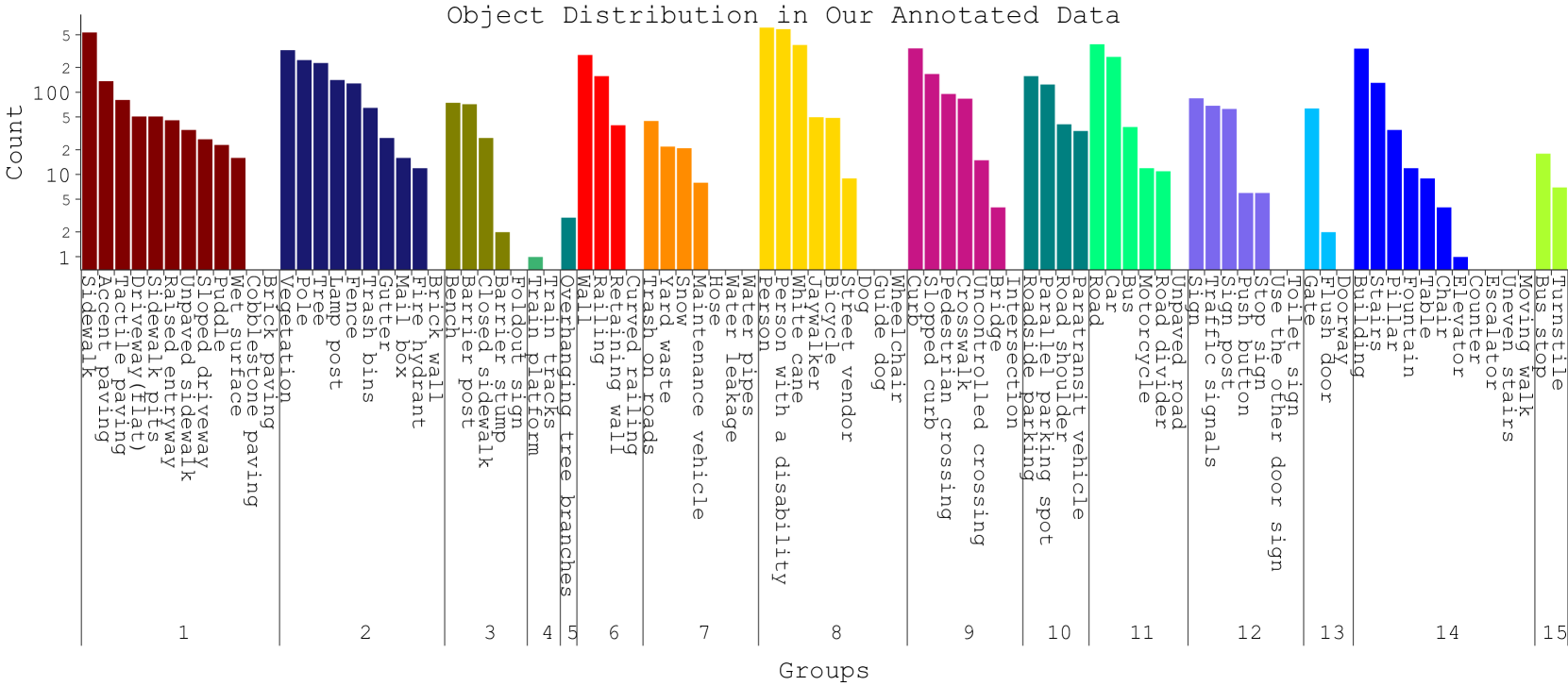
A Dataset for Crucial Object Recognition in Blind and Low-Vision Individuals' Navigation
Md Touhidul Islam, Imran Kabir, Elena Ariel Pearce, Md Alimoor Reza, Syed Masum Billah
This paper introduces a dataset for improving real-time object recognition systems to aid blind and low-vision (BLV) individuals in navigation tasks. The dataset comprises 21 videos of BLV individuals navigating outdoor spaces, and a taxonomy of 90 objects crucial for BLV navigation, refined through a focus group study. We also provide object labeling for the 90 objects across 31 video segments created from the 21 videos. A deeper analysis reveals that most contemporary datasets used in training computer vision models contain only a small subset of the taxonomy in our dataset. Preliminary evaluation of state-of-the-art computer vision models on our dataset highlights shortcomings in accurately detecting key objects relevant to BLV navigation, emphasizing the need for specialized datasets. We make our dataset publicly available, offering valuable resources for developing more inclusive navigation systems for BLV individuals.
Read more7/25/2024