Deep Reinforcement Learning for Adverse Garage Scenario Generation
2407.01333
0
0

Abstract
Autonomous vehicles need to travel over 11 billion miles to ensure their safety. Therefore, the importance of simulation testing before real-world testing is self-evident. In recent years, the release of 3D simulators for autonomous driving, represented by Carla and CarSim, marks the transition of autonomous driving simulation testing environments from simple 2D overhead views to complex 3D models. During simulation testing, experimenters need to build static scenes and dynamic traffic flows, pedestrian flows, and other experimental elements to construct experimental scenarios. When building static scenes in 3D simulators, experimenters often need to manually construct 3D models, set parameters and attributes, which is time-consuming and labor-intensive. This thesis proposes an automated program generation framework. Based on deep reinforcement learning, this framework can generate different 2D ground script codes, on which 3D model files and map model files are built. The generated 3D ground scenes are displayed in the Carla simulator, where experimenters can use this scene for navigation algorithm simulation testing.
Create account to get full access
Overview
- This paper describes a deep reinforcement learning approach for generating adverse garage scenarios in a 3D simulation environment.
- The goal is to train an AI agent to create realistic and challenging driving scenarios that can be used to test and improve self-driving car systems.
- The paper explores techniques like Simulation-Based Reinforcement Learning for Real-World Autonomous Driving, Platform-Agnostic Deep Reinforcement Learning Framework for Effective Sim-to-Real Transfer, and Generative Adversarial Learning for HD Map-Free Autonomous Driving to develop their approach.
Plain English Explanation
The researchers wanted to create a system that could generate complex and challenging driving scenarios to test self-driving car systems. Current testing methods often use simple, pre-defined scenarios that don't fully capture the unpredictability of real-world driving.
To address this, the researchers developed a deep reinforcement learning agent that can learn to create adversarial driving scenarios in a 3D simulation environment. The agent is trained to manipulate various elements of the environment, like the placement of obstacles or the behaviors of other vehicles, in order to generate scenarios that are difficult for a self-driving car to navigate successfully.
The key idea is that by training the agent to create these challenging scenarios, the self-driving car systems can be exposed to a much wider range of possible situations during testing. This helps to identify weaknesses and edge cases that may not be captured by traditional testing methods. The goal is to improve the robustness and safety of self-driving car systems before they are deployed in the real world.
The researchers draw inspiration from related work in areas like Exploring Generative AI for Sim-to-Real Driving Data Synthesis and Acceleration Method for Generating Perception Failure Scenarios Based, which explores the use of generative models and simulation-based methods for improving autonomous driving capabilities.
Technical Explanation
The core of the researchers' approach is a deep reinforcement learning agent that is trained to manipulate elements of a 3D simulation environment to generate adverse driving scenarios. The agent is rewarded for creating scenarios that are challenging for a self-driving car to navigate successfully.
The agent has control over various parameters of the environment, such as the placement of obstacles, the behaviors of other vehicles, and the weather conditions. By adjusting these parameters, the agent can create a wide range of scenarios, from straightforward driving situations to complex, multi-vehicle interactions and environmental challenges.
The researchers use a combination of techniques to train the agent, including curriculum learning, where the difficulty of the scenarios is gradually increased, and adversarial training, where the agent competes against a self-driving car system to create the most challenging situations.
The self-driving car system is also trained within the simulation environment, using the scenarios generated by the adversarial agent. This allows the self-driving car system to be exposed to a much broader range of situations than would be possible with traditional testing methods, helping to identify and address weaknesses in the system's perception, planning, and control capabilities.
The researchers evaluate their approach through a series of experiments, measuring the performance of the self-driving car system on the scenarios generated by the adversarial agent. They also compare their method to alternative approaches, such as manually designed scenarios and random scenario generation, to demonstrate the advantages of their deep reinforcement learning-based approach.
Critical Analysis
The researchers have presented a compelling approach for generating adverse driving scenarios using deep reinforcement learning. By training an agent to create challenging situations, they are able to expose self-driving car systems to a much broader range of possible scenarios during testing, which is a significant advancement over traditional methods.
One potential limitation of the research is the reliance on a 3D simulation environment. While this allows for precise control and measurement of the scenarios, it raises questions about the transferability of the findings to the real world. The researchers acknowledge this and suggest that further work is needed to bridge the gap between simulation and reality, perhaps through techniques like Platform-Agnostic Deep Reinforcement Learning Framework for Effective Sim-to-Real Transfer.
Additionally, the researchers focus primarily on the generation of adverse scenarios, without much discussion of how these scenarios could be used to improve the self-driving car systems themselves. Further research could explore ways to integrate the adversarial scenario generation with the training and optimization of the self-driving car algorithms, potentially drawing inspiration from work in Generative Adversarial Learning for HD Map-Free Autonomous Driving.
Overall, the researchers have made a valuable contribution to the field of autonomous driving by demonstrating the potential of deep reinforcement learning for generating challenging driving scenarios. As self-driving car systems continue to advance, approaches like this will be critical for ensuring their safety and robustness in the real world.
Conclusion
This paper presents a novel deep reinforcement learning approach for generating adverse driving scenarios in a 3D simulation environment. By training an agent to manipulate the environment to create challenging situations, the researchers are able to expose self-driving car systems to a much broader range of possible scenarios during testing.
The key contribution of this work is the ability to systematically generate complex, unpredictable driving scenarios that go beyond the limitations of traditional testing methods. This has important implications for improving the safety and robustness of self-driving car systems before they are deployed in the real world.
While the reliance on simulation raises some questions about the transferability of the findings, the researchers have laid the groundwork for further advancements in this area. By integrating these adversarial scenario generation techniques with the training and optimization of self-driving car algorithms, the field can make significant progress towards safer and more capable autonomous vehicles.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏅
Simulation-based reinforcement learning for real-world autonomous driving
B{l}a.zej Osi'nski, Adam Jakubowski, Piotr Mi{l}o's, Pawe{l} Zik{e}cina, Christopher Galias, Silviu Homoceanu, Henryk Michalewski
0
0
We use reinforcement learning in simulation to obtain a driving system controlling a full-size real-world vehicle. The driving policy takes RGB images from a single camera and their semantic segmentation as input. We use mostly synthetic data, with labelled real-world data appearing only in the training of the segmentation network. Using reinforcement learning in simulation and synthetic data is motivated by lowering costs and engineering effort. In real-world experiments we confirm that we achieved successful sim-to-real policy transfer. Based on the extensive evaluation, we analyze how design decisions about perception, control, and training impact the real-world performance.
4/4/2024
🤿
A Platform-Agnostic Deep Reinforcement Learning Framework for Effective Sim2Real Transfer in Autonomous Driving
Dianzhao Li, Ostap Okhrin
0
0
Deep Reinforcement Learning (DRL) has shown remarkable success in solving complex tasks across various research fields. However, transferring DRL agents to the real world is still challenging due to the significant discrepancies between simulation and reality. To address this issue, we propose a robust DRL framework that leverages platform-dependent perception modules to extract task-relevant information and train a lane-following and overtaking agent in simulation. This framework facilitates the seamless transfer of the DRL agent to new simulated environments and the real world with minimal effort. We evaluate the performance of the agent in various driving scenarios in both simulation and the real world, and compare it to human players and the PID baseline in simulation. Our proposed framework significantly reduces the gaps between different platforms and the Sim2Real gap, enabling the trained agent to achieve similar performance in both simulation and the real world, driving the vehicle effectively.
5/1/2024
GAD-Generative Learning for HD Map-Free Autonomous Driving
Weijian Sun, Yanbo Jia, Qi Zeng, Zihao Liu, Jiang Liao, Yue Li, Xianfeng Li
0
0
Deep-learning-based techniques have been widely adopted for autonomous driving software stacks for mass production in recent years, focusing primarily on perception modules, with some work extending this method to prediction modules. However, the downstream planning and control modules are still designed with hefty handcrafted rules, dominated by optimization-based methods such as quadratic programming or model predictive control. This results in a performance bottleneck for autonomous driving systems in that corner cases simply cannot be solved by enumerating hand-crafted rules. We present a deep-learning-based approach that brings prediction, decision, and planning modules together with the attempt to overcome the rule-based methods' deficiency in real-world applications of autonomous driving, especially for urban scenes. The DNN model we proposed is solely trained with 10 hours of human driver data, and it supports all mass-production ADAS features available on the market to date. This method is deployed onto a Jiyue test car with no modification to its factory-ready sensor set and compute platform. the feasibility, usability, and commercial potential are demonstrated in this article.
6/3/2024
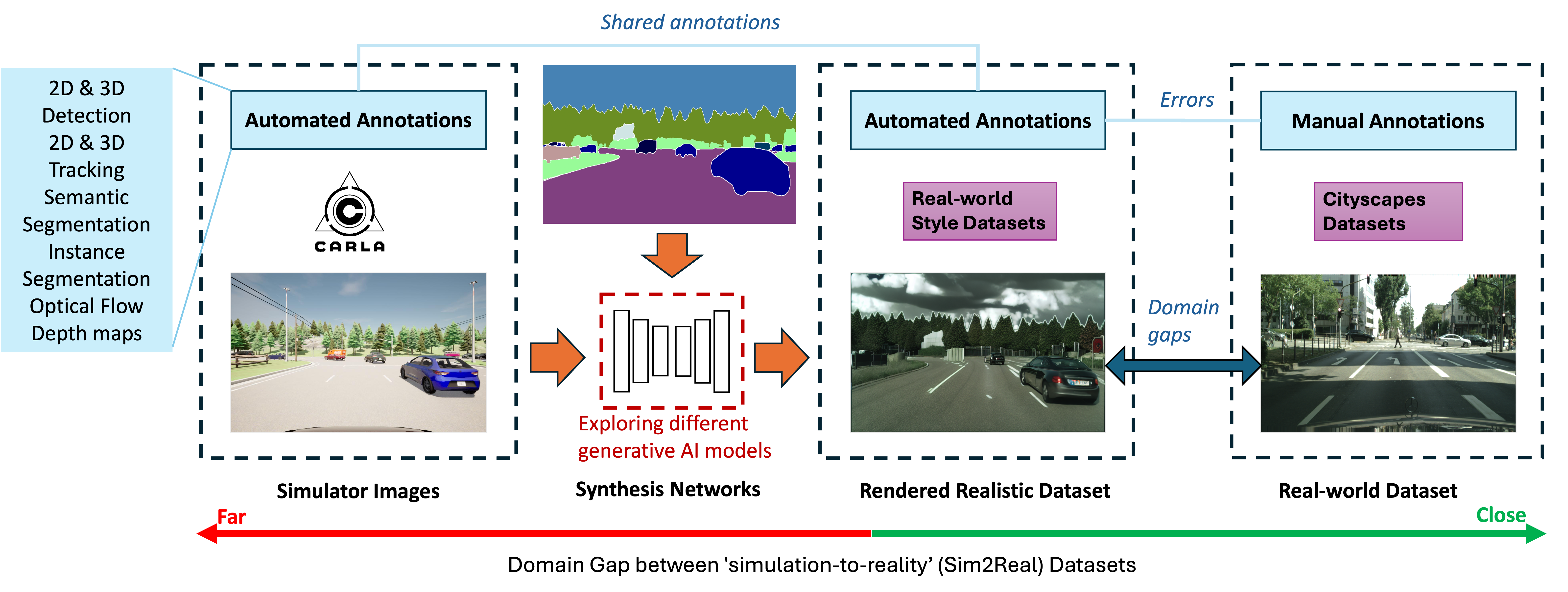
Exploring Generative AI for Sim2Real in Driving Data Synthesis
Haonan Zhao, Yiting Wang, Thomas Bashford-Rogers, Valentina Donzella, Kurt Debattista
0
0
Datasets are essential for training and testing vehicle perception algorithms. However, the collection and annotation of real-world images is time-consuming and expensive. Driving simulators offer a solution by automatically generating various driving scenarios with corresponding annotations, but the simulation-to-reality (Sim2Real) domain gap remains a challenge. While most of the Generative Artificial Intelligence (AI) follows the de facto Generative Adversarial Nets (GANs)-based methods, the recent emerging diffusion probabilistic models have not been fully explored in mitigating Sim2Real challenges for driving data synthesis. To explore the performance, this paper applied three different generative AI methods to leverage semantic label maps from a driving simulator as a bridge for the creation of realistic datasets. A comparative analysis of these methods is presented from the perspective of image quality and perception. New synthetic datasets, which include driving images and auto-generated high-quality annotations, are produced with low costs and high scene variability. The experimental results show that although GAN-based methods are adept at generating high-quality images when provided with manually annotated labels, ControlNet produces synthetic datasets with fewer artefacts and more structural fidelity when using simulator-generated labels. This suggests that the diffusion-based approach may provide improved stability and an alternative method for addressing Sim2Real challenges.
4/16/2024