Deep Reinforcement Learning for Multi-Truck Vehicle Routing Problems with Multi-Leg Demand Routes

0

Sign in to get full access
Overview
- This paper presents a deep reinforcement learning approach for solving the multi-truck vehicle routing problem with multi-leg demand routes.
- The problem involves optimizing the routes of multiple trucks to fulfill customer demands that may require multiple stops.
- The authors develop a deep neural network-based agent that learns to make routing decisions through interaction with a simulated environment.
Plain English Explanation
In the world of logistics and transportation, companies often need to efficiently organize the routes of their delivery trucks to meet customer demands. This problem, known as the vehicle routing problem, can become especially complex when there are multiple trucks involved and customers require multiple stops to fulfill their orders.
The researchers in this paper tackled this multi-truck vehicle routing problem with multi-leg demand routes. Imagine a scenario where a company has several delivery trucks that need to visit various customer locations to drop off packages. Some customers may need items from multiple locations, requiring the trucks to make multiple stops to fulfill a single customer's order.
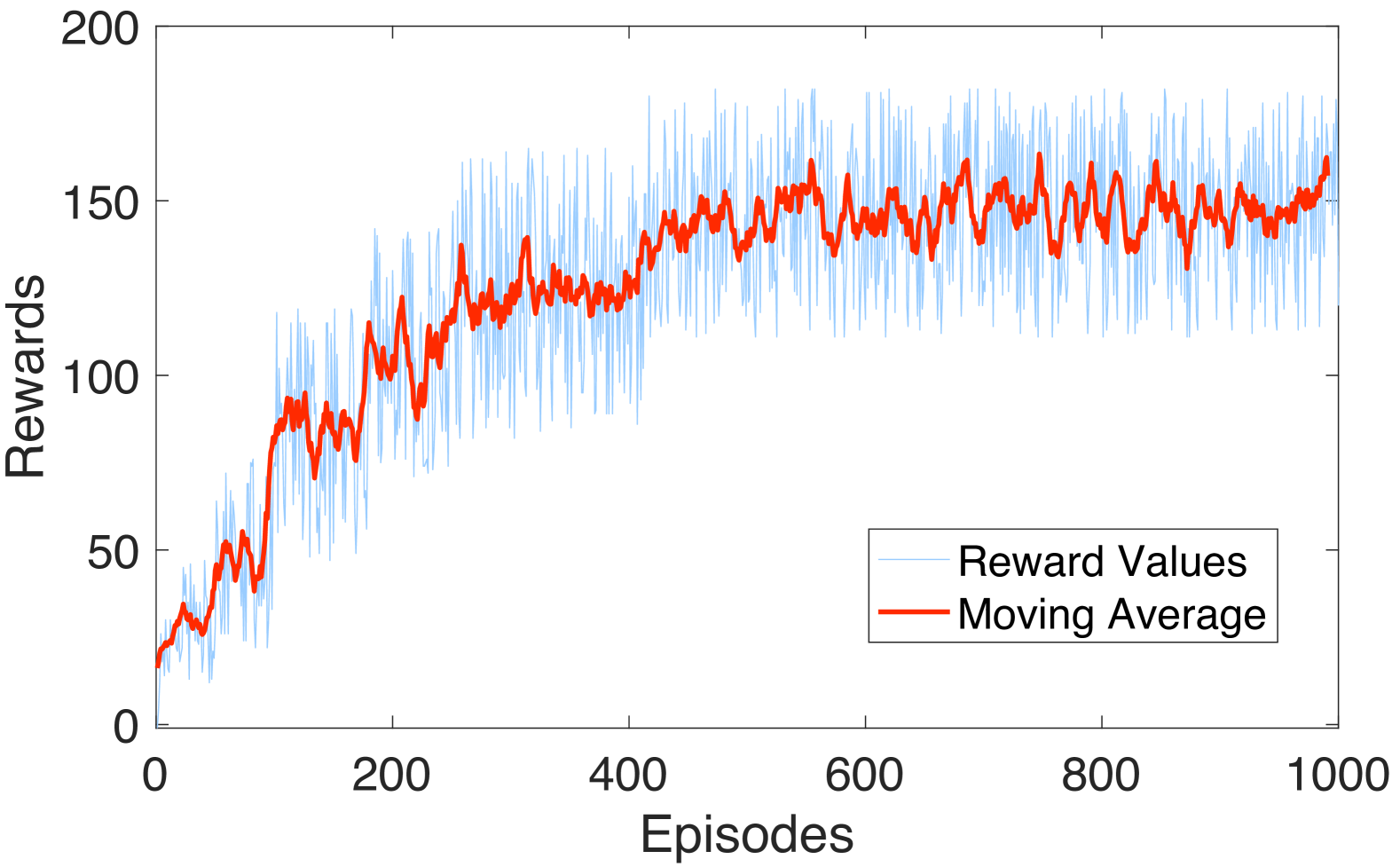
To solve this problem, the researchers developed a deep reinforcement learning approach. They trained a neural network-based agent to learn how to make the best routing decisions through trial and error in a simulated environment. The agent gradually improves its decision-making skills by receiving rewards for efficient routes and penalties for inefficient ones.
By using this deep reinforcement learning technique, the researchers were able to create a system that can efficiently plan the routes for multiple trucks to meet all customer demands, even when those demands require multiple stops. This can help logistics companies optimize their operations, reduce delivery times, and provide better service to their customers.
Technical Explanation
The researchers formulated the multi-truck vehicle routing problem with multi-leg demand routes as a sequential decision-making problem, where the goal is to plan the routes for multiple trucks to fulfill customer demands while minimizing the total travel distance.
To solve this problem, they developed a deep reinforcement learning approach, where a neural network-based agent learns to make routing decisions through interaction with a simulated environment. The agent receives information about the current state of the problem, such as the locations of trucks, customers, and the remaining demands, and then takes actions to move the trucks and fulfill the demands.
The neural network architecture used by the agent consists of several layers, including an input layer that encodes the state information, hidden layers that extract relevant features, and an output layer that predicts the best actions to take. The agent is trained using an reinforcement learning algorithm, where it receives rewards for efficient routes and penalties for inefficient ones, allowing it to gradually improve its decision-making skills.
The researchers conducted extensive experiments to evaluate the performance of their deep reinforcement learning approach on a range of benchmark instances. They compared their method to traditional optimization algorithms and found that their approach was able to produce high-quality solutions in a shorter amount of time, demonstrating the potential of deep reinforcement learning for solving complex vehicle routing problems.
Critical Analysis
One of the key strengths of the deep reinforcement learning approach presented in this paper is its ability to handle the complexity of the multi-truck vehicle routing problem with multi-leg demand routes. By using a neural network to learn the optimal routing decisions, the method can potentially scale to larger problem instances and handle a wider range of constraints and requirements than traditional optimization algorithms.
However, the paper does not provide a detailed analysis of the limitations of the proposed approach. For example, it is unclear how the method would perform on real-world instances with additional factors, such as uncertain travel times, dynamic customer demands, or changes in the transportation network. Additionally, the paper does not discuss the computational complexity of the deep reinforcement learning algorithm, which could be a concern for large-scale problems.
Furthermore, the paper does not explore the potential for transferring the learned knowledge from one problem instance to another, which could be a valuable capability for practical applications. Investigating techniques for knowledge transfer or meta-learning could potentially improve the generalization and efficiency of the deep reinforcement learning approach.
Conclusion
In this paper, the researchers presented a deep reinforcement learning-based solution for the multi-truck vehicle routing problem with multi-leg demand routes. By training a neural network-based agent to make routing decisions through interaction with a simulated environment, they were able to develop an efficient and scalable approach for this complex logistics problem.
The results of the experiments suggest that the deep reinforcement learning method can outperform traditional optimization algorithms, making it a promising technique for real-world applications in logistics and transportation. However, further research is needed to address the potential limitations of the approach, such as handling uncertainty, dynamic changes, and computational complexity.
Overall, this work demonstrates the power of deep reinforcement learning for tackling challenging combinatorial optimization problems in the logistics domain, and it paves the way for future research and development in this area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Deep Reinforcement Learning for Multi-Truck Vehicle Routing Problems with Multi-Leg Demand Routes
Joshua Levin, Randall Correll, Takanori Ide, Takafumi Suzuki, Takaho Saito, Alan Arai
Deep reinforcement learning (RL) has been shown to be effective in producing approximate solutions to some vehicle routing problems (VRPs), especially when using policies generated by encoder-decoder attention mechanisms. While these techniques have been quite successful for relatively simple problem instances, there are still under-researched and highly complex VRP variants for which no effective RL method has been demonstrated. In this work we focus on one such VRP variant, which contains multiple trucks and multi-leg routing requirements. In these problems, demand is required to move along sequences of nodes, instead of just from a start node to an end node. With the goal of making deep RL a viable strategy for real-world industrial-scale supply chain logistics, we develop new extensions to existing encoder-decoder attention models which allow them to handle multiple trucks and multi-leg routing requirements. Our models have the advantage that they can be trained for a small number of trucks and nodes, and then embedded into a large supply chain to yield solutions for larger numbers of trucks and nodes. We test our approach on a real supply chain environment arising in the operations of Japanese automotive parts manufacturer Aisin Corporation, and find that our algorithm outperforms Aisin's previous best solution.
Read more8/28/2024
🏅
0
Using Reinforcement Learning for the Three-Dimensional Loading Capacitated Vehicle Routing Problem
Stefan Schoepf, Stephen Mak, Julian Senoner, Liming Xu, Netland Torbjorn, Alexandra Brintrup
Heavy goods vehicles are vital backbones of the supply chain delivery system but also contribute significantly to carbon emissions with only 60% loading efficiency in the United Kingdom. Collaborative vehicle routing has been proposed as a solution to increase efficiency, but challenges remain to make this a possibility. One key challenge is the efficient computation of viable solutions for co-loading and routing. Current operations research methods suffer from non-linear scaling with increasing problem size and are therefore bound to limited geographic areas to compute results in time for day-to-day operations. This only allows for local optima in routing and leaves global optimisation potential untouched. We develop a reinforcement learning model to solve the three-dimensional loading capacitated vehicle routing problem in approximately linear time. While this problem has been studied extensively in operations research, no publications on solving it with reinforcement learning exist. We demonstrate the favourable scaling of our reinforcement learning model and benchmark our routing performance against state-of-the-art methods. The model performs within an average gap of 3.83% to 8.10% compared to established methods. Our model not only represents a promising first step towards large-scale logistics optimisation with reinforcement learning but also lays the foundation for this research stream. GitHub: https://github.com/if-loops/3L-CVRP
Read more6/12/2024
0
SmartPathfinder: Pushing the Limits of Heuristic Solutions for Vehicle Routing Problem with Drones Using Reinforcement Learning
Navid Mohammad Imran, Myounggyu Won
The Vehicle Routing Problem with Drones (VRPD) seeks to optimize the routing paths for both trucks and drones, where the trucks are responsible for delivering parcels to customer locations, and the drones are dispatched from these trucks for parcel delivery, subsequently being retrieved by the trucks. Given the NP-Hard complexity of VRPD, numerous heuristic approaches have been introduced. However, improving solution quality and reducing computation time remain significant challenges. In this paper, we conduct a comprehensive examination of heuristic methods designed for solving VRPD, distilling and standardizing them into core elements. We then develop a novel reinforcement learning (RL) framework that is seamlessly integrated with the heuristic solution components, establishing a set of universal principles for incorporating the RL framework with heuristic strategies in an aim to improve both the solution quality and computation speed. This integration has been applied to a state-of-the-art heuristic solution for VRPD, showcasing the substantial benefits of incorporating the RL framework. Our evaluation results demonstrated that the heuristic solution incorporated with our RL framework not only elevated the quality of solutions but also achieved rapid computation speeds, especially when dealing with extensive customer locations.
Read more4/23/2024

0
Multi-Task Lane-Free Driving Strategy for Connected and Automated Vehicles: A Multi-Agent Deep Reinforcement Learning Approach
Mehran Berahman, Majid Rostami-Shahrbabaki, Klaus Bogenberger
Deep reinforcement learning has shown promise in various engineering applications, including vehicular traffic control. The non-stationary nature of traffic, especially in the lane-free environment with more degrees of freedom in vehicle behaviors, poses challenges for decision-making since a wrong action might lead to a catastrophic failure. In this paper, we propose a novel driving strategy for Connected and Automated Vehicles (CAVs) based on a competitive Multi-Agent Deep Deterministic Policy Gradient approach. The developed multi-agent deep reinforcement learning algorithm creates a dynamic and non-stationary scenario, mirroring real-world traffic complexities and making trained agents more robust. The algorithm's reward function is strategically and uniquely formulated to cover multiple vehicle control tasks, including maintaining desired speeds, overtaking, collision avoidance, and merging and diverging maneuvers. Moreover, additional considerations for both lateral and longitudinal passenger comfort and safety criteria are taken into account. We employed inter-vehicle forces, known as nudging and repulsive forces, to manage the maneuvers of CAVs in a lane-free traffic environment. The proposed driving algorithm is trained and evaluated on lane-free roads using the Simulation of Urban Mobility platform. Experimental results demonstrate the algorithm's efficacy in handling different objectives, highlighting its potential to enhance safety and efficiency in autonomous driving within lane-free traffic environments.
Read more6/24/2024