SmartPathfinder: Pushing the Limits of Heuristic Solutions for Vehicle Routing Problem with Drones Using Reinforcement Learning
2404.13068
0
0
Abstract
The Vehicle Routing Problem with Drones (VRPD) seeks to optimize the routing paths for both trucks and drones, where the trucks are responsible for delivering parcels to customer locations, and the drones are dispatched from these trucks for parcel delivery, subsequently being retrieved by the trucks. Given the NP-Hard complexity of VRPD, numerous heuristic approaches have been introduced. However, improving solution quality and reducing computation time remain significant challenges. In this paper, we conduct a comprehensive examination of heuristic methods designed for solving VRPD, distilling and standardizing them into core elements. We then develop a novel reinforcement learning (RL) framework that is seamlessly integrated with the heuristic solution components, establishing a set of universal principles for incorporating the RL framework with heuristic strategies in an aim to improve both the solution quality and computation speed. This integration has been applied to a state-of-the-art heuristic solution for VRPD, showcasing the substantial benefits of incorporating the RL framework. Our evaluation results demonstrated that the heuristic solution incorporated with our RL framework not only elevated the quality of solutions but also achieved rapid computation speeds, especially when dealing with extensive customer locations.
Create account to get full access
Overview
- This paper introduces "SmartPathfinder," a reinforcement learning-based solution for the Vehicle Routing Problem with Drones (VRPD).
- The VRPD is a logistics optimization challenge that involves finding the most efficient routes for delivery vehicles and drones to transport goods from a central depot to various locations.
- The authors demonstrate how their reinforcement learning approach can outperform traditional heuristic solutions, pushing the limits of what is possible for this complex problem.
Plain English Explanation
The Vehicle Routing Problem with Drones (VRPD) is a logistics challenge that companies face when trying to efficiently deliver goods from a central location to customers spread out in different places. It's like a really complicated version of planning the best routes for your delivery trucks and drones.
The authors of this paper have developed a new solution called "SmartPathfinder" that uses reinforcement learning to find the most efficient delivery routes. Reinforcement learning is a type of artificial intelligence that learns by trial and error, kind of like how a child learns by experimenting and getting feedback.
The key innovation of SmartPathfinder is that it can outperform traditional "heuristic" solutions, which are rules-based approaches that try to find good solutions but aren't always the best. By using reinforcement learning, SmartPathfinder can explore a wider range of possible solutions and learn from its mistakes to find even better routes.
This is important because the VRPD is an extremely complex problem, with many variables to consider, such as the locations of customers, the capabilities of vehicles and drones, and the costs of different delivery options. Previous research has shown that reinforcement learning can be effective for solving these kinds of complex logistics problems.
Overall, the authors' work demonstrates the power of reinforcement learning to push the boundaries of what's possible for logistics optimization, potentially leading to more efficient and cost-effective delivery systems in the real world.
Technical Explanation
The authors of this paper present "SmartPathfinder," a reinforcement learning-based solution for the Vehicle Routing Problem with Drones (VRPD). The VRPD is a complex logistics optimization challenge that involves finding the most efficient routes for delivery vehicles and drones to transport goods from a central depot to various locations.
The key innovation of SmartPathfinder is its use of reinforcement learning, a type of machine learning that allows the system to learn optimal delivery strategies through trial and error. This is in contrast to traditional "heuristic" solutions, which rely on pre-defined rules and may not always find the best possible routes.
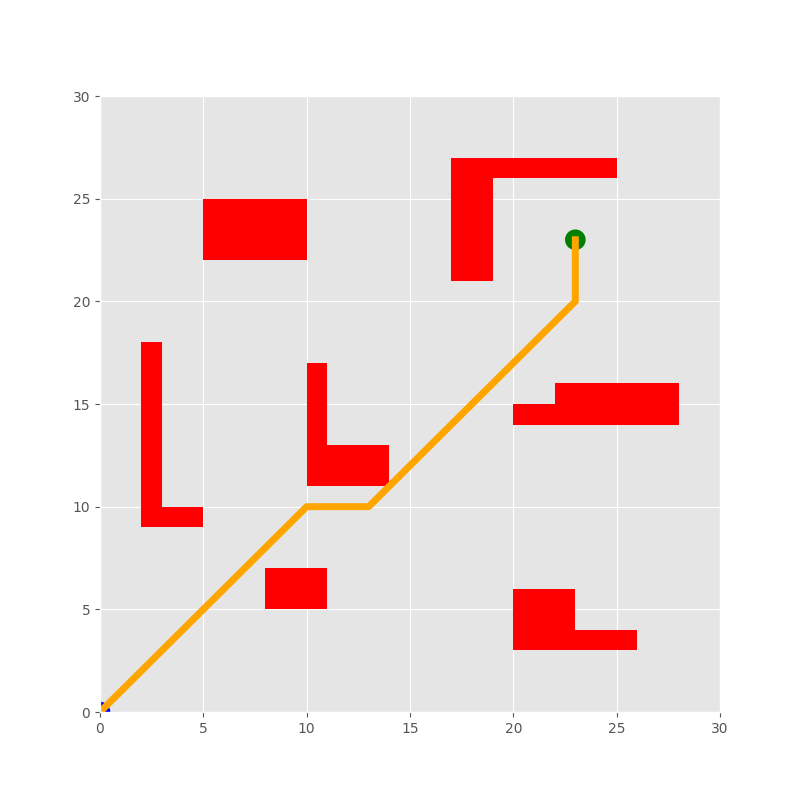
The authors designed a reinforcement learning agent that can dynamically plan routes, taking into account factors such as the locations of customers, the capabilities of vehicles and drones, and the costs associated with different delivery options. Through extensive simulation experiments, the authors demonstrate that SmartPathfinder can outperform heuristic solutions, pushing the limits of what is possible for the VRPD.
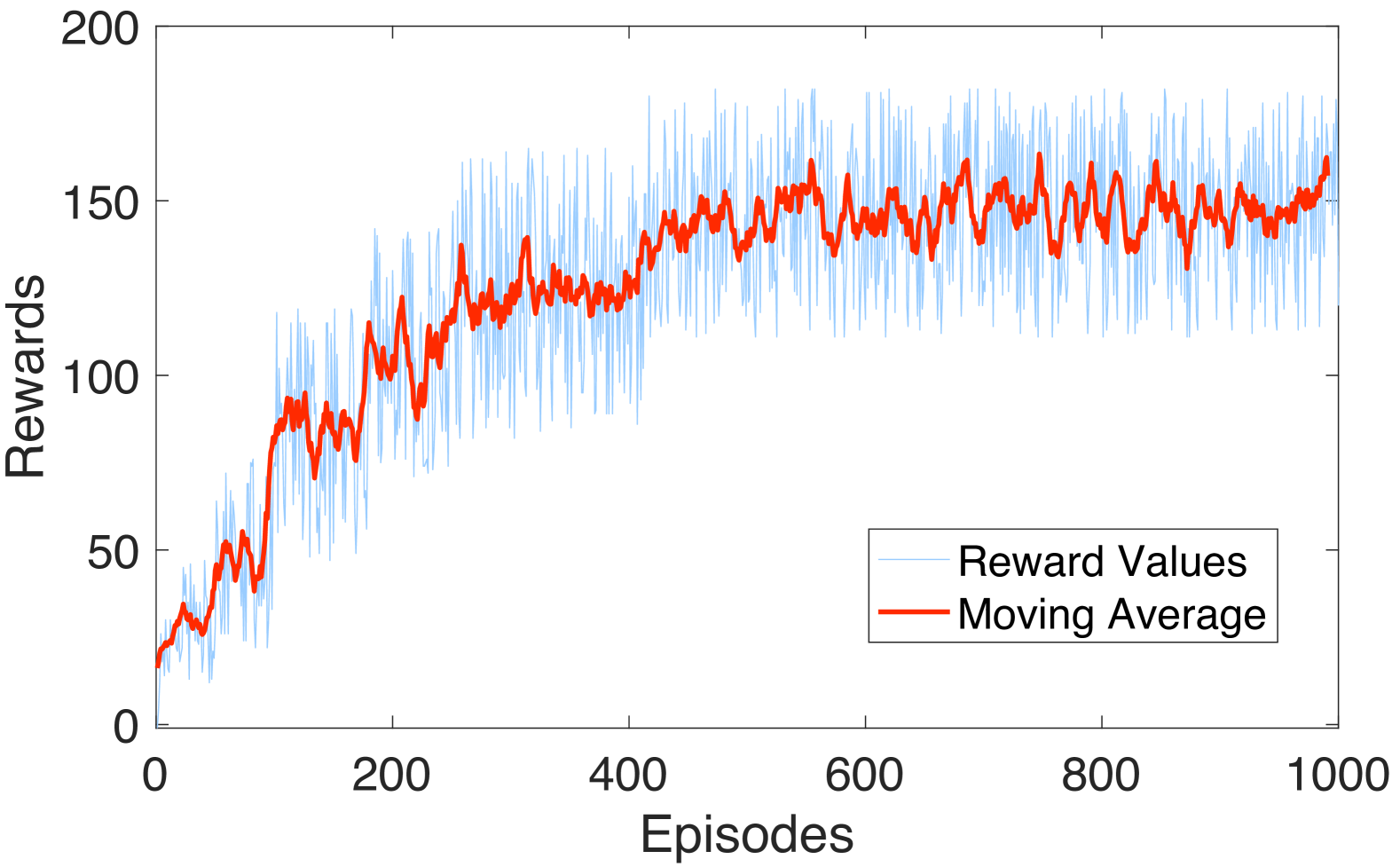
The authors' deep reinforcement learning-based approach involves training the agent on a large number of simulated delivery scenarios, allowing it to learn from its mistakes and gradually improve its decision-making. This is a powerful technique that has been successfully applied to other complex logistics problems in the past.
Critical Analysis
The authors have presented a compelling solution to the VRPD, demonstrating the potential of reinforcement learning to outperform traditional heuristic approaches. However, the paper does not address some important limitations and areas for further research.
One potential concern is the scalability of the reinforcement learning approach. While the authors show impressive results on smaller problem instances, it's unclear how well SmartPathfinder would scale to larger, more complex real-world delivery networks. The computational resources required for training and deploying the reinforcement learning agent may also be a practical challenge.
Additionally, the authors do not provide much insight into the interpretability of the reinforcement learning model. In many logistics applications, it's important to understand the reasoning behind the system's decisions, rather than treating it as a "black box." Further research could explore ways to make the reinforcement learning approach more transparent and explainable.
Finally, the authors do not consider potential issues related to the safety and reliability of drones in real-world delivery scenarios. Factors such as weather conditions, regulatory constraints, and the risk of drone failures could significantly impact the feasibility and practicality of the proposed solution.
Despite these limitations, the authors' work represents an important step forward in the application of reinforcement learning to logistics optimization. By continuing to push the boundaries of what is possible, researchers and practitioners can unlock new opportunities for more efficient and sustainable delivery systems.
Conclusion
The paper introduces "SmartPathfinder," a reinforcement learning-based solution for the Vehicle Routing Problem with Drones (VRPD). The authors demonstrate how their approach can outperform traditional heuristic solutions, highlighting the potential of reinforcement learning to push the limits of what is possible for this complex logistics optimization challenge.
While the paper presents promising results, it also raises important questions about the scalability, interpretability, and real-world practicality of the reinforcement learning-based approach. Addressing these challenges will be crucial for transitioning the technology from simulation to real-world deployment.
Overall, the authors' work represents a significant contribution to the field of logistics optimization, showcasing the power of reinforcement learning to tackle complex problems and potentially lead to more efficient and sustainable delivery systems in the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
VRPD-DT: Vehicle Routing Problem with Drones Under Dynamically Changing Traffic Conditions
Navid Imran, Myounggyu Won
0
0
The vehicle routing problem with drones (VRP-D) is to determine the optimal routes of trucks and drones such that the total operational cost is minimized in a scenario where the trucks work in tandem with the drones to deliver parcels to customers. While various heuristic algorithms have been developed to address the problem, existing solutions are built based on simplistic cost models, overlooking the temporal dynamics of the costs, which fluctuate depending on the dynamically changing traffic conditions. In this paper, we present a novel problem called the vehicle routing problem with drones under dynamically changing traffic conditions (VRPD-DT) to address the limitation of existing VRP-D solutions. We design a novel cost model that factors in the actual travel distance and projected travel time, computed using a machine learning-driven travel time prediction algorithm. A variable neighborhood descent (VND) algorithm is developed to find the optimal truck-drone routes under the dynamics of traffic conditions through incorporation of the travel time prediction model. A simulation study was performed to evaluate the performance compared with a state-of-the-art VRP-D heuristic solution. The results demonstrate that the proposed algorithm outperforms the state-of-the-art algorithm in various delivery scenarios.
4/16/2024
🏅
Using Reinforcement Learning for the Three-Dimensional Loading Capacitated Vehicle Routing Problem
Stefan Schoepf, Stephen Mak, Julian Senoner, Liming Xu, Netland Torbjorn, Alexandra Brintrup
0
0
Heavy goods vehicles are vital backbones of the supply chain delivery system but also contribute significantly to carbon emissions with only 60% loading efficiency in the United Kingdom. Collaborative vehicle routing has been proposed as a solution to increase efficiency, but challenges remain to make this a possibility. One key challenge is the efficient computation of viable solutions for co-loading and routing. Current operations research methods suffer from non-linear scaling with increasing problem size and are therefore bound to limited geographic areas to compute results in time for day-to-day operations. This only allows for local optima in routing and leaves global optimisation potential untouched. We develop a reinforcement learning model to solve the three-dimensional loading capacitated vehicle routing problem in approximately linear time. While this problem has been studied extensively in operations research, no publications on solving it with reinforcement learning exist. We demonstrate the favourable scaling of our reinforcement learning model and benchmark our routing performance against state-of-the-art methods. The model performs within an average gap of 3.83% to 8.10% compared to established methods. Our model not only represents a promising first step towards large-scale logistics optimisation with reinforcement learning but also lays the foundation for this research stream. GitHub: https://github.com/if-loops/3L-CVRP
6/12/2024
Multi-AGV Path Planning Method via Reinforcement Learning and Particle Filters
Shao Shuo
0
0
Thanks to its robust learning and search stabilities,the reinforcement learning (RL) algorithm has garnered increasingly significant attention and been exten-sively applied in Automated Guided Vehicle (AGV) path planning. However, RL-based planning algorithms have been discovered to suffer from the substantial variance of neural networks caused by environmental instability and significant fluctua-tions in system structure. These challenges manifest in slow convergence speed and low learning efficiency. To tackle this issue, this paper presents a novel multi-AGV path planning method named Particle Filters - Double Deep Q-Network (PF-DDQN)via leveraging Particle Filters (PF) and RL algorithm. Firstly, the proposed method leverages the imprecise weight values of the network as state values to formulate thestate space equation.Subsequently, the DDQN model is optimized to acquire the optimal true weight values through the iterative fusion process of neural networksand PF in order to enhance the optimization efficiency of the proposedmethod. Lastly, the performance of the proposed method is validated by different numerical simulations. The simulation results demonstrate that the proposed methoddominates the traditional DDQN algorithm in terms of path planning superiority andtraining time indicator by 92.62% and 76.88%, respectively. Therefore, the proposedmethod could be considered as a vital alternative in the field of multi-AGV path planning.
5/24/2024
🤿
Deep Reinforcement Learning for Mobile Robot Path Planning
Hao Liu, Yi Shen, Shuangjiang Yu, Zijun Gao, Tong Wu
0
0
Path planning is an important problem with the the applications in many aspects, such as video games, robotics etc. This paper proposes a novel method to address the problem of Deep Reinforcement Learning (DRL) based path planning for a mobile robot. We design DRL-based algorithms, including reward functions, and parameter optimization, to avoid time-consuming work in a 2D environment. We also designed an Two-way search hybrid A* algorithm to improve the quality of local path planning. We transferred the designed algorithm to a simple embedded environment to test the computational load of the algorithm when running on a mobile robot. Experiments show that when deployed on a robot platform, the DRL-based algorithm in this article can achieve better planning results and consume less computing resources.
4/11/2024