Depth Prompting for Sensor-Agnostic Depth Estimation
2405.11867
0
0

Abstract
Dense depth maps have been used as a key element of visual perception tasks. There have been tremendous efforts to enhance the depth quality, ranging from optimization-based to learning-based methods. Despite the remarkable progress for a long time, their applicability in the real world is limited due to systematic measurement biases such as density, sensing pattern, and scan range. It is well-known that the biases make it difficult for these methods to achieve their generalization. We observe that learning a joint representation for input modalities (e.g., images and depth), which most recent methods adopt, is sensitive to the biases. In this work, we disentangle those modalities to mitigate the biases with prompt engineering. For this, we design a novel depth prompt module to allow the desirable feature representation according to new depth distributions from either sensor types or scene configurations. Our depth prompt can be embedded into foundation models for monocular depth estimation. Through this embedding process, our method helps the pretrained model to be free from restraint of depth scan range and to provide absolute scale depth maps. We demonstrate the effectiveness of our method through extensive evaluations. Source code is publicly available at https://github.com/JinhwiPark/DepthPrompting .
Create account to get full access
Overview
- The paper introduces a novel depth estimation technique called "Depth Prompting" that is sensor-agnostic, meaning it can work with various depth sensors without needing specialized training.
- The method leverages large language models and prompt engineering to enable depth estimation from a single RGB image, without requiring depth sensors or specialized depth training.
- The paper demonstrates the effectiveness of Depth Prompting on several depth estimation benchmarks, showing it can achieve competitive performance compared to sensor-specific and task-specific depth models.
Plain English Explanation
The research paper presents a new way to estimate the depth of objects in a single image, without needing specialized depth sensors or training. The key idea is to use large language models, which are AI systems trained on huge amounts of text data, and a technique called "prompt engineering" to enable depth estimation from just a regular RGB image.
Typically, depth estimation requires either specialized depth sensors like lidar or stereo cameras, or training a machine learning model specifically for depth prediction. This new "Depth Prompting" approach sidesteps those requirements by leveraging the powerful knowledge and language understanding capabilities of large language models.
By carefully crafting the prompts (instructions) given to the language model, the researchers were able to get the model to accurately estimate the depth of objects in an image, without any depth-specific training. This makes the technique "sensor-agnostic" - it can work with any regular camera, not just specialized depth sensors.
The paper shows that this Depth Prompting approach can achieve results on par with specialized depth estimation models, while being much more flexible and convenient to use. This could enable depth estimation in a wide range of applications that previously required dedicated depth sensors and training.
Technical Explanation
The key innovation in this paper is the "Depth Prompting" technique, which enables sensor-agnostic depth estimation using large language models. Typical depth estimation methods either require specialized depth sensors like lidar or stereo cameras, or training a machine learning model specifically for the depth estimation task.
In contrast, the Depth Prompting approach leverages the powerful language understanding capabilities of large language models like CLIP and GPT-3. By carefully crafting prompts (textual instructions) that guide the language model to reason about the depth information in a single RGB image, the researchers were able to achieve competitive depth estimation performance without any depth-specific training.
The paper evaluates Depth Prompting on several popular depth estimation benchmarks, including NYUv2, KITTI, and ScanNet. The results show that Depth Prompting can achieve performance on par with or even better than specialized depth estimation models, while being much more flexible and convenient to use.
Additionally, the paper explores ways to further improve Depth Prompting, such as by incorporating 3D point cloud or image guidance information to refine the depth estimates.
Critical Analysis
The Depth Prompting approach presented in this paper is a promising step towards more flexible and accessible depth estimation. By leveraging large language models, the technique can estimate depth from a single RGB image without requiring specialized depth sensors or training. This could enable depth estimation in a wide range of applications that were previously limited by the need for dedicated hardware and training.
However, the paper does acknowledge some limitations of the current Depth Prompting approach. For instance, the depth estimates may not be as accurate as those from sensor-specific or task-specific models, particularly in challenging environments or for fine-grained depth details. Additionally, the reliance on large language models means the technique may be computationally more intensive than specialized depth estimation models.
Further research could explore ways to address these limitations, such as by developing more efficient prompting strategies, incorporating additional cues (e.g., motion, semantics) to refine the depth estimates, or exploring hybrid approaches that combine Depth Prompting with other depth estimation techniques.
Overall, the Depth Prompting method represents an exciting step towards more flexible and accessible depth estimation, and the insights and techniques presented in this paper could have a significant impact on the field.
Conclusion
The Depth Prompting technique introduced in this paper offers a novel approach to depth estimation that is sensor-agnostic and leverages the power of large language models. By carefully crafting prompts to guide the language model's reasoning about depth information in a single RGB image, the researchers were able to achieve depth estimation performance on par with specialized models, without requiring dedicated depth sensors or training.
This flexible and accessible depth estimation method could have widespread applications, from robotics and autonomous vehicles to augmented reality and computational photography. While the current Depth Prompting approach has some limitations, the insights and techniques presented in this paper represent an important advancement in the field of depth estimation, and could inspire further research and development in this area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Robust Depth Enhancement via Polarization Prompt Fusion Tuning
Kei Ikemura, Yiming Huang, Felix Heide, Zhaoxiang Zhang, Qifeng Chen, Chenyang Lei
0
0
Existing depth sensors are imperfect and may provide inaccurate depth values in challenging scenarios, such as in the presence of transparent or reflective objects. In this work, we present a general framework that leverages polarization imaging to improve inaccurate depth measurements from various depth sensors. Previous polarization-based depth enhancement methods focus on utilizing pure physics-based formulas for a single sensor. In contrast, our method first adopts a learning-based strategy where a neural network is trained to estimate a dense and complete depth map from polarization data and a sensor depth map from different sensors. To further improve the performance, we propose a Polarization Prompt Fusion Tuning (PPFT) strategy to effectively utilize RGB-based models pre-trained on large-scale datasets, as the size of the polarization dataset is limited to train a strong model from scratch. We conducted extensive experiments on a public dataset, and the results demonstrate that the proposed method performs favorably compared to existing depth enhancement baselines. Code and demos are available at https://lastbasket.github.io/PPFT/.
4/9/2024
DoubleTake: Geometry Guided Depth Estimation
Mohamed Sayed, Filippo Aleotti, Jamie Watson, Zawar Qureshi, Guillermo Garcia-Hernando, Gabriel Brostow, Sara Vicente, Michael Firman
0
0
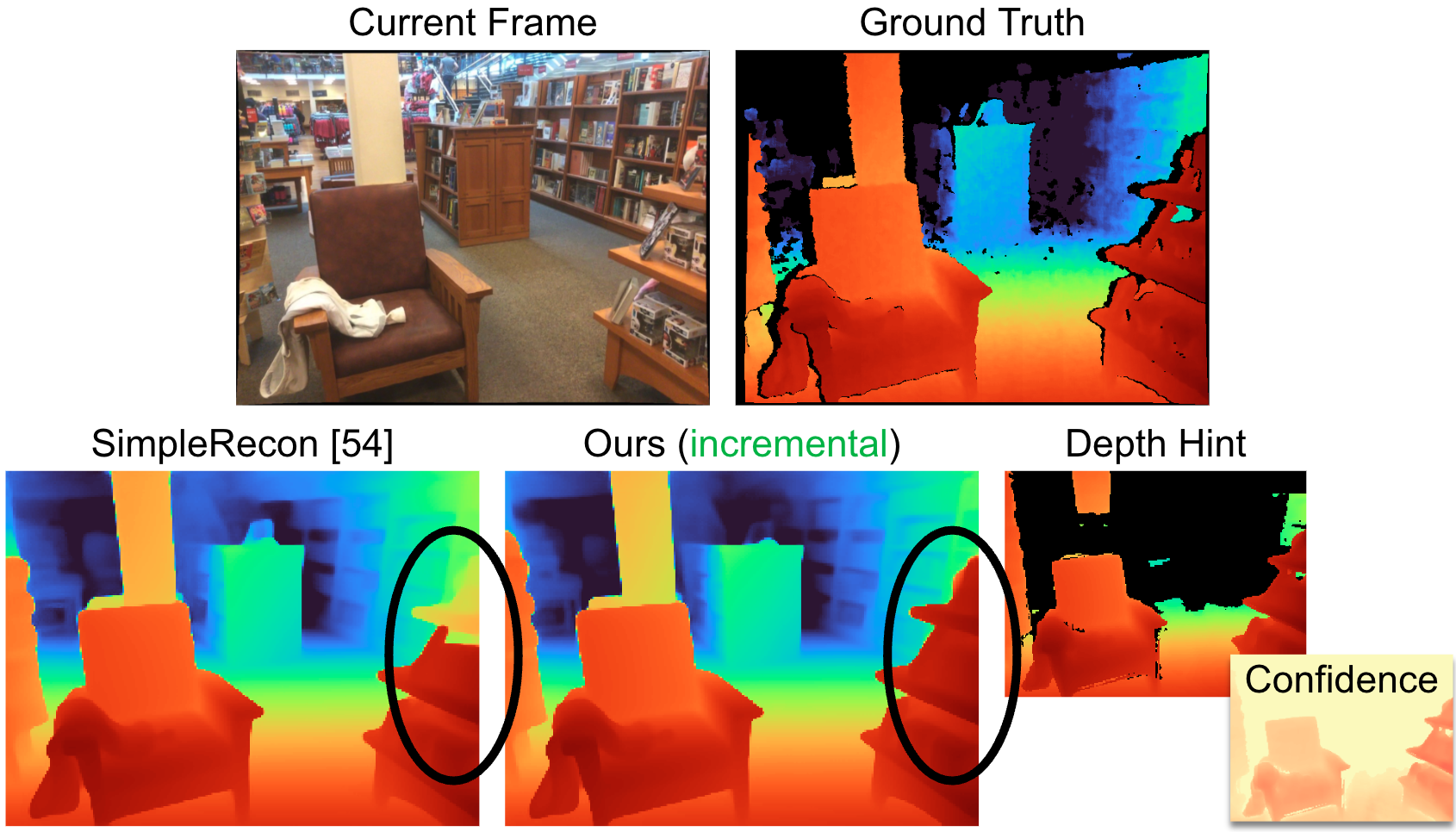
Estimating depth from a sequence of posed RGB images is a fundamental computer vision task, with applications in augmented reality, path planning etc. Prior work typically makes use of previous frames in a multi view stereo framework, relying on matching textures in a local neighborhood. In contrast, our model leverages historical predictions by giving the latest 3D geometry data as an extra input to our network. This self-generated geometric hint can encode information from areas of the scene not covered by the keyframes and it is more regularized when compared to individual predicted depth maps for previous frames. We introduce a Hint MLP which combines cost volume features with a hint of the prior geometry, rendered as a depth map from the current camera location, together with a measure of the confidence in the prior geometry. We demonstrate that our method, which can run at interactive speeds, achieves state-of-the-art estimates of depth and 3D scene reconstruction in both offline and incremental evaluation scenarios.
6/27/2024

DCPI-Depth: Explicitly Infusing Dense Correspondence Prior to Unsupervised Monocular Depth Estimation
Mengtan Zhang, Yi Feng, Qijun Chen, Rui Fan
0
0
There has been a recent surge of interest in learning to perceive depth from monocular videos in an unsupervised fashion. A key challenge in this field is achieving robust and accurate depth estimation in challenging scenarios, particularly in regions with weak textures or where dynamic objects are present. This study makes three major contributions by delving deeply into dense correspondence priors to provide existing frameworks with explicit geometric constraints. The first novelty is a contextual-geometric depth consistency loss, which employs depth maps triangulated from dense correspondences based on estimated ego-motion to guide the learning of depth perception from contextual information, since explicitly triangulated depth maps capture accurate relative distances among pixels. The second novelty arises from the observation that there exists an explicit, deducible relationship between optical flow divergence and depth gradient. A differential property correlation loss is, therefore, designed to refine depth estimation with a specific emphasis on local variations. The third novelty is a bidirectional stream co-adjustment strategy that enhances the interaction between rigid and optical flows, encouraging the former towards more accurate correspondence and making the latter more adaptable across various scenarios under the static scene hypotheses. DCPI-Depth, a framework that incorporates all these innovative components and couples two bidirectional and collaborative streams, achieves state-of-the-art performance and generalizability across multiple public datasets, outperforming all existing prior arts. Specifically, it demonstrates accurate depth estimation in texture-less and dynamic regions, and shows more reasonable smoothness.
5/28/2024
🧪
Towards Domain-agnostic Depth Completion
Guangkai Xu, Wei Yin, Jianming Zhang, Oliver Wang, Simon Niklaus, Simon Chen, Jia-Wang Bian
0
0
Existing depth completion methods are often targeted at a specific sparse depth type and generalize poorly across task domains. We present a method to complete sparse/semi-dense, noisy, and potentially low-resolution depth maps obtained by various range sensors, including those in modern mobile phones, or by multi-view reconstruction algorithms. Our method leverages a data-driven prior in the form of a single image depth prediction network trained on large-scale datasets, the output of which is used as an input to our model. We propose an effective training scheme where we simulate various sparsity patterns in typical task domains. In addition, we design two new benchmarks to evaluate the generalizability and the robustness of depth completion methods. Our simple method shows superior cross-domain generalization ability against state-of-the-art depth completion methods, introducing a practical solution to high-quality depth capture on a mobile device. The code is available at: https://github.com/YvanYin/FillDepth.
4/9/2024