DexDiffuser: Generating Dexterous Grasps with Diffusion Models

0
🤿
Sign in to get full access
Overview
- DexDiffuser is a novel dexterous grasping method that generates, evaluates, and refines grasps on partial object point clouds.
- It includes two key components: the DexSampler, a conditional diffusion-based grasp sampler, and the DexEvaluator, a dexterous grasp evaluator.
- The paper also introduces two grasp refinement strategies: Evaluator-Guided Diffusion (EGD) and Evaluator-based Sampling Refinement (ESR).
Plain English Explanation
DexDiffuser is a new way to help robots grasp objects, even when they can only see a partial view of the object. It works by first generating many potential grasps, then evaluating those grasps to find the best ones, and finally refining the grasps to improve their quality.
The key components are the DexSampler and the DexEvaluator. The DexSampler generates high-quality grasps by starting with random grasps and gradually refining them through a process called "diffusion." The DexEvaluator then assesses the quality of the generated grasps to identify the best ones.
The paper also introduces two additional techniques, Evaluator-Guided Diffusion (EGD) and Evaluator-based Sampling Refinement (ESR), which further improve the grasp generation process.
Overall, DexDiffuser is designed to help robots grasp objects more reliably, even when the robot can only see part of the object. This could be useful in a variety of applications, such as warehouse automation or household robotics.
Technical Explanation
DexDiffuser
DexDiffuser is a novel dexterous grasping method that generates, evaluates, and refines grasps on partial object point clouds. It is composed of two main components:
- DexSampler: A conditional diffusion-based grasp sampler that generates high-quality grasps conditioned on object point clouds by iterative denoising of randomly sampled grasps.
- DexEvaluator: A dexterous grasp evaluator that assesses the quality of the generated grasps.
Additionally, the paper introduces two grasp refinement strategies:
- Evaluator-Guided Diffusion (EGD): A technique that uses the DexEvaluator to guide the diffusion process, further improving the quality of the generated grasps.
- Evaluator-based Sampling Refinement (ESR): A method that leverages the DexEvaluator to refine the grasp sampling process, leading to more reliable grasps.
The authors demonstrate that DexDiffuser consistently outperforms the state-of-the-art multi-finger grasp generation method FFHNet, with an average 9.12% and 19.44% higher grasp success rate in simulation and real robot experiments, respectively.
DexSampler
The DexSampler is a key component of DexDiffuser that generates high-quality grasps conditioned on object point clouds. It uses a diffusion-based approach, where it starts with randomly sampled grasps and iteratively refines them through a denoising process. This allows the DexSampler to generate grasps that are well-suited to the given object shape.
DexEvaluator
The DexEvaluator is responsible for assessing the quality of the generated grasps. It takes the object point cloud and a proposed grasp as input, and outputs a score that reflects the grasp's quality. This evaluation is crucial for identifying the best grasps among the many that are generated by the DexSampler.
Evaluator-Guided Diffusion (EGD)
The Evaluator-Guided Diffusion (EGD) technique uses the DexEvaluator to guide the diffusion process in the DexSampler. By incorporating the evaluator's feedback, the diffusion process can be refined to generate even higher-quality grasps.
Evaluator-based Sampling Refinement (ESR)
The Evaluator-based Sampling Refinement (ESR) method leverages the DexEvaluator to improve the grasp sampling process. By using the evaluator's feedback to refine the sampling, the system can generate more reliable grasps that are better suited to the object.
Critical Analysis
The paper presents a comprehensive and well-designed approach to dexterous grasping using partial object point clouds. The authors have successfully incorporated several key techniques, such as diffusion-based grasp sampling, grasp evaluation, and grasp refinement, to create a robust and effective grasping system.
One potential limitation of the approach is the reliance on partial object point clouds. While this is a realistic scenario, it may be beneficial to investigate the performance of DexDiffuser on complete object models as well, to understand the full capabilities of the system.
Additionally, the paper could have explored the computational efficiency of the proposed methods, as real-time performance is crucial for many robotic applications. An analysis of the trade-offs between grasp quality and computational cost would provide valuable insights for practitioners.
Finally, it would be interesting to see how DexDiffuser performs on a wider range of object types and scenarios, including household items, tools, and other everyday objects. Expanding the experimental evaluation could further validate the generalizability of the approach.
Conclusion
DexDiffuser introduces a novel dexterous grasping method that generates, evaluates, and refines grasps on partial object point clouds. By combining the DexSampler, DexEvaluator, Evaluator-Guided Diffusion (EGD), and Evaluator-based Sampling Refinement (ESR), the system consistently outperforms the state-of-the-art in both simulation and real-world experiments.
This research represents a significant advancement in the field of robotic grasping, as it addresses the challenge of reliable object manipulation in the presence of partial information. The techniques developed in this paper could have far-reaching implications for a wide range of applications, from warehouse automation to household robotics, where the ability to grasp objects effectively is essential.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤿
0
DexDiffuser: Generating Dexterous Grasps with Diffusion Models
Zehang Weng, Haofei Lu, Danica Kragic, Jens Lundell
We introduce DexDiffuser, a novel dexterous grasping method that generates, evaluates, and refines grasps on partial object point clouds. DexDiffuser includes the conditional diffusion-based grasp sampler DexSampler and the dexterous grasp evaluator DexEvaluator. DexSampler generates high-quality grasps conditioned on object point clouds by iterative denoising of randomly sampled grasps. We also introduce two grasp refinement strategies: Evaluator-Guided Diffusion (EGD) and Evaluator-based Sampling Refinement (ESR). The experiment results demonstrate that DexDiffuser consistently outperforms the state-of-the-art multi-finger grasp generation method FFHNet with an, on average, 9.12% and 19.44% higher grasp success rate in simulation and real robot experiments, respectively. Supplementary materials are available at https://yulihn.github.io/DexDiffuser_page/
Read more7/8/2024

0
DexGrasp-Diffusion: Diffusion-based Unified Functional Grasp Synthesis Pipeline for Multi-Dexterous Robotic Hands
Zhengshen Zhang, Lei Zhou, Chenchen Liu, Zhiyang Liu, Chengran Yuan, Sheng Guo, Ruiteng Zhao, Marcelo H. Ang Jr., Francis EH Tay
The versatility and adaptability of human grasping catalyze advancing dexterous robotic manipulation. While significant strides have been made in dexterous grasp generation, current research endeavors pivot towards optimizing object manipulation while ensuring functional integrity, emphasizing the synthesis of functional grasps following desired affordance instructions. This paper addresses the challenge of synthesizing functional grasps tailored to diverse dexterous robotic hands by proposing DexGrasp-Diffusion, an end-to-end modularized diffusion-based pipeline. DexGrasp-Diffusion integrates MultiHandDiffuser, a novel unified data-driven diffusion model for multi-dexterous hands grasp estimation, with DexDiscriminator, which employs a Physics Discriminator and a Functional Discriminator with open-vocabulary setting to filter physically plausible functional grasps based on object affordances. The experimental evaluation conducted on the MultiDex dataset provides substantiating evidence supporting the superior performance of MultiHandDiffuser over the baseline model in terms of success rate, grasp diversity, and collision depth. Moreover, we demonstrate the capacity of DexGrasp-Diffusion to reliably generate functional grasps for household objects aligned with specific affordance instructions.
Read more7/16/2024
0
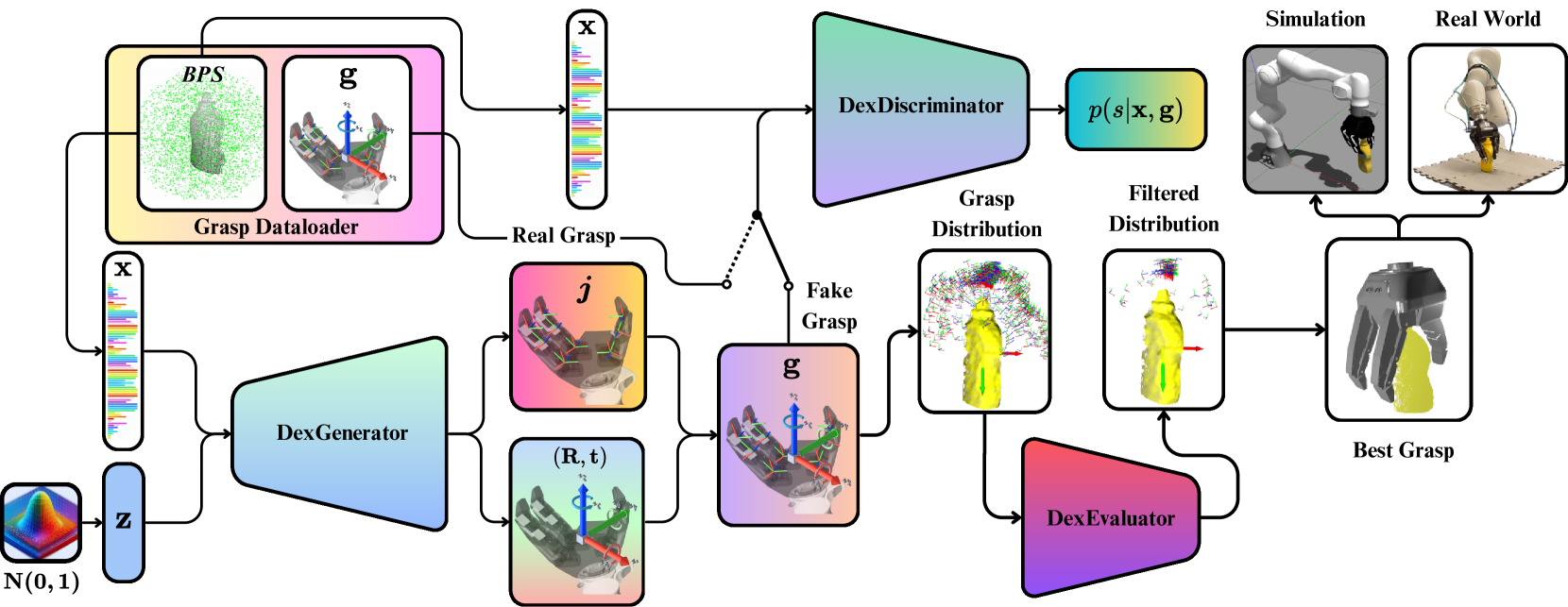
DexGANGrasp: Dexterous Generative Adversarial Grasping Synthesis for Task-Oriented Manipulation
Qian Feng, David S. Martinez Lema, Mohammadhossein Malmir, Hang Li, Jianxiang Feng, Zhaopeng Chen, Alois Knoll
We introduce DexGanGrasp, a dexterous grasping synthesis method that generates and evaluates grasps with single view in real time. DexGanGrasp comprises a Conditional Generative Adversarial Networks (cGANs)-based DexGenerator to generate dexterous grasps and a discriminator-like DexEvalautor to assess the stability of these grasps. Extensive simulation and real-world expriments showcases the effectiveness of our proposed method, outperforming the baseline FFHNet with an 18.57% higher success rate in real-world evaluation. We further extend DexGanGrasp to DexAfford-Prompt, an open-vocabulary affordance grounding pipeline for dexterous grasping leveraging Multimodal Large Language Models (MLLMs) and Vision Language Models (VLMs), to achieve task-oriented grasping with successful real-world deployments.
Read more7/25/2024
0
GrainGrasp: Dexterous Grasp Generation with Fine-grained Contact Guidance
Fuqiang Zhao, Dzmitry Tsetserukou, Qian Liu
One goal of dexterous robotic grasping is to allow robots to handle objects with the same level of flexibility and adaptability as humans. However, it remains a challenging task to generate an optimal grasping strategy for dexterous hands, especially when it comes to delicate manipulation and accurate adjustment the desired grasping poses for objects of varying shapes and sizes. In this paper, we propose a novel dexterous grasp generation scheme called GrainGrasp that provides fine-grained contact guidance for each fingertip. In particular, we employ a generative model to predict separate contact maps for each fingertip on the object point cloud, effectively capturing the specifics of finger-object interactions. In addition, we develop a new dexterous grasping optimization algorithm that solely relies on the point cloud as input, eliminating the necessity for complete mesh information of the object. By leveraging the contact maps of different fingertips, the proposed optimization algorithm can generate precise and determinable strategies for human-like object grasping. Experimental results confirm the efficiency of the proposed scheme.
Read more5/17/2024