DexGrasp-Diffusion: Diffusion-based Unified Functional Grasp Synthesis Pipeline for Multi-Dexterous Robotic Hands

0

Sign in to get full access
Overview
• This paper presents a new approach called "DexGrasp-Diffusion" for generating dexterous and functional grasps for multi-fingered robotic hands using diffusion models.
• The authors propose a unified pipeline that can handle a wide range of grasping scenarios, including top-down, side, and in-hand manipulation, by leveraging the versatility of diffusion models.
• Key innovations include a novel diffusion-based grasp generation method, a curriculum learning strategy to improve grasp synthesis, and a post-processing module to refine the generated grasps.
Plain English Explanation
The paper introduces a new technique called "DexGrasp-Diffusion" that uses a type of machine learning model called a "diffusion model" to help robotic hands grasp objects in a more dexterous and functional way. Diffusion models are a powerful tool that can generate diverse and realistic outputs, and the authors have found a way to use them specifically for robotic grasping.
The main idea is to create a unified system that can handle a wide variety of grasping scenarios, from simply picking up an object from the top, to more complex maneuvers like grasping from the side or even adjusting the grasp during the process (called "in-hand manipulation"). This is important because real-world objects come in all shapes and sizes, and robotic hands need to be able to adapt to these different situations.
The authors developed a few key innovations to make this work. First, they came up with a new way to use the diffusion model for generating grasps. Second, they used a "curriculum learning" approach, which means they trained the model in stages to gradually increase the complexity of the tasks it could handle. Finally, they added a post-processing step to refine the generated grasps and make them even more precise and dexterous.
Overall, this research represents an important step forward in helping robots become more adept at grasping and manipulating a wide range of objects, which could have applications in areas like manufacturing, household tasks, and even surgery.
Technical Explanation
The paper introduces a novel approach called "DexGrasp-Diffusion" that leverages the power of diffusion models to generate dexterous and functional grasps for multi-fingered robotic hands. The key innovations include:
-
A new diffusion-based grasp generation method: The authors propose a diffusion-based grasp generation framework that can handle a wide range of grasping scenarios, including top-down, side, and in-hand manipulation. This is achieved by formulating the grasp synthesis as a diffusion process that gradually transforms a random initial state into a desired grasp configuration.
-
A curriculum learning strategy: To improve the grasp synthesis performance, the authors employ a curriculum learning strategy that progressively increases the complexity of the grasping tasks during training. This helps the model learn more robust and generalizable grasping skills.
-
A post-processing module: The authors introduce a post-processing module that refines the generated grasps by optimizing the hand pose and finger configurations to achieve more dexterous and stable grasps.
The authors evaluate the performance of their DexGrasp-Diffusion pipeline on various grasping benchmarks and demonstrate its superiority over existing state-of-the-art methods. The results show that the proposed approach can generate high-quality grasps that are both dexterous and functional, covering a wide range of grasping scenarios.
Critical Analysis
The DexGrasp-Diffusion approach presented in the paper is a promising step forward in the field of dexterous robotic grasping. The authors' use of diffusion models to generate diverse and realistic grasps, combined with their curriculum learning strategy and post-processing module, represents a comprehensive and well-designed solution.
However, the paper does not address several potential limitations and areas for further research. For example, the performance of the system on real-world, noisy sensor data and physical robotic platforms is not evaluated. Additionally, the computational complexity and inference time of the diffusion-based grasp generation method may limit its applicability in real-time scenarios.
Furthermore, the paper does not provide a detailed analysis of the generalization capabilities of the DexGrasp-Diffusion pipeline. It would be valuable to understand how the system performs on novel object shapes and grasping scenarios beyond the ones included in the training data.
Future research could also explore the integration of the DexGrasp-Diffusion approach with other complementary techniques, such as DexGrasp-Diffusion, Dexterous Functional Pre-Grasp Manipulation with Diffusion Policy, or Learning Granularity-Aware Affordances from Human-Object Interaction, to further enhance the system's capabilities and robustness.
Conclusion
The DexGrasp-Diffusion pipeline presented in this paper represents a significant advancement in the field of dexterous robotic grasping. By leveraging the versatility of diffusion models, the authors have developed a unified approach that can handle a wide range of grasping scenarios, from simple top-down grasps to more complex in-hand manipulation tasks.
The key innovations, including the diffusion-based grasp generation method, curriculum learning strategy, and post-processing module, collectively contribute to the system's ability to generate high-quality, dexterous, and functional grasps. This research has the potential to significantly impact various applications, such as GrainGrasp: Dexterous Grasp Generation with Fine-Grained Contact, Multi-Fingered Dynamic Grasping of Unknown Objects, and other areas where robust and adaptable robotic grasping is crucial.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
DexGrasp-Diffusion: Diffusion-based Unified Functional Grasp Synthesis Pipeline for Multi-Dexterous Robotic Hands
Zhengshen Zhang, Lei Zhou, Chenchen Liu, Zhiyang Liu, Chengran Yuan, Sheng Guo, Ruiteng Zhao, Marcelo H. Ang Jr., Francis EH Tay
The versatility and adaptability of human grasping catalyze advancing dexterous robotic manipulation. While significant strides have been made in dexterous grasp generation, current research endeavors pivot towards optimizing object manipulation while ensuring functional integrity, emphasizing the synthesis of functional grasps following desired affordance instructions. This paper addresses the challenge of synthesizing functional grasps tailored to diverse dexterous robotic hands by proposing DexGrasp-Diffusion, an end-to-end modularized diffusion-based pipeline. DexGrasp-Diffusion integrates MultiHandDiffuser, a novel unified data-driven diffusion model for multi-dexterous hands grasp estimation, with DexDiscriminator, which employs a Physics Discriminator and a Functional Discriminator with open-vocabulary setting to filter physically plausible functional grasps based on object affordances. The experimental evaluation conducted on the MultiDex dataset provides substantiating evidence supporting the superior performance of MultiHandDiffuser over the baseline model in terms of success rate, grasp diversity, and collision depth. Moreover, we demonstrate the capacity of DexGrasp-Diffusion to reliably generate functional grasps for household objects aligned with specific affordance instructions.
Read more7/16/2024
🤿
0
DexDiffuser: Generating Dexterous Grasps with Diffusion Models
Zehang Weng, Haofei Lu, Danica Kragic, Jens Lundell
We introduce DexDiffuser, a novel dexterous grasping method that generates, evaluates, and refines grasps on partial object point clouds. DexDiffuser includes the conditional diffusion-based grasp sampler DexSampler and the dexterous grasp evaluator DexEvaluator. DexSampler generates high-quality grasps conditioned on object point clouds by iterative denoising of randomly sampled grasps. We also introduce two grasp refinement strategies: Evaluator-Guided Diffusion (EGD) and Evaluator-based Sampling Refinement (ESR). The experiment results demonstrate that DexDiffuser consistently outperforms the state-of-the-art multi-finger grasp generation method FFHNet with an, on average, 9.12% and 19.44% higher grasp success rate in simulation and real robot experiments, respectively. Supplementary materials are available at https://yulihn.github.io/DexDiffuser_page/
Read more7/8/2024
0
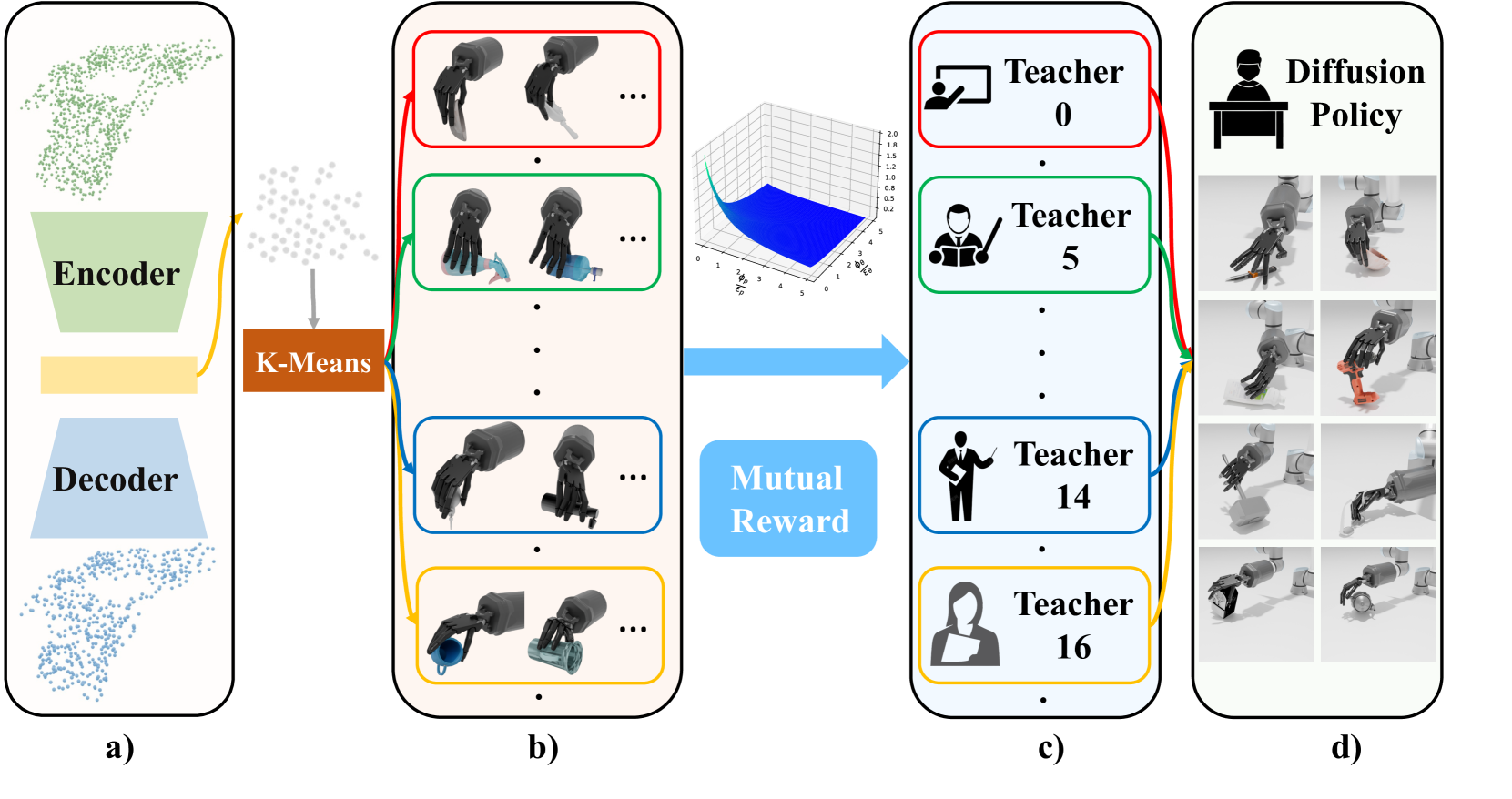
Dexterous Functional Pre-Grasp Manipulation with Diffusion Policy
Tianhao Wu, Yunchong Gan, Mingdong Wu, Jingbo Cheng, Yaodong Yang, Yixin Zhu, Hao Dong
In real-world scenarios, objects often require repositioning and reorientation before they can be grasped, a process known as pre-grasp manipulation. Learning universal dexterous functional pre-grasp manipulation requires precise control over the relative position, orientation, and contact between the hand and object while generalizing to diverse dynamic scenarios with varying objects and goal poses. To address this challenge, we propose a teacher-student learning approach that utilizes a novel mutual reward, incentivizing agents to optimize three key criteria jointly. Additionally, we introduce a pipeline that employs a mixture-of-experts strategy to learn diverse manipulation policies, followed by a diffusion policy to capture complex action distributions from these experts. Our method achieves a success rate of 72.6% across more than 30 object categories by leveraging extrinsic dexterity and adjusting from feedback.
Read more5/7/2024
0
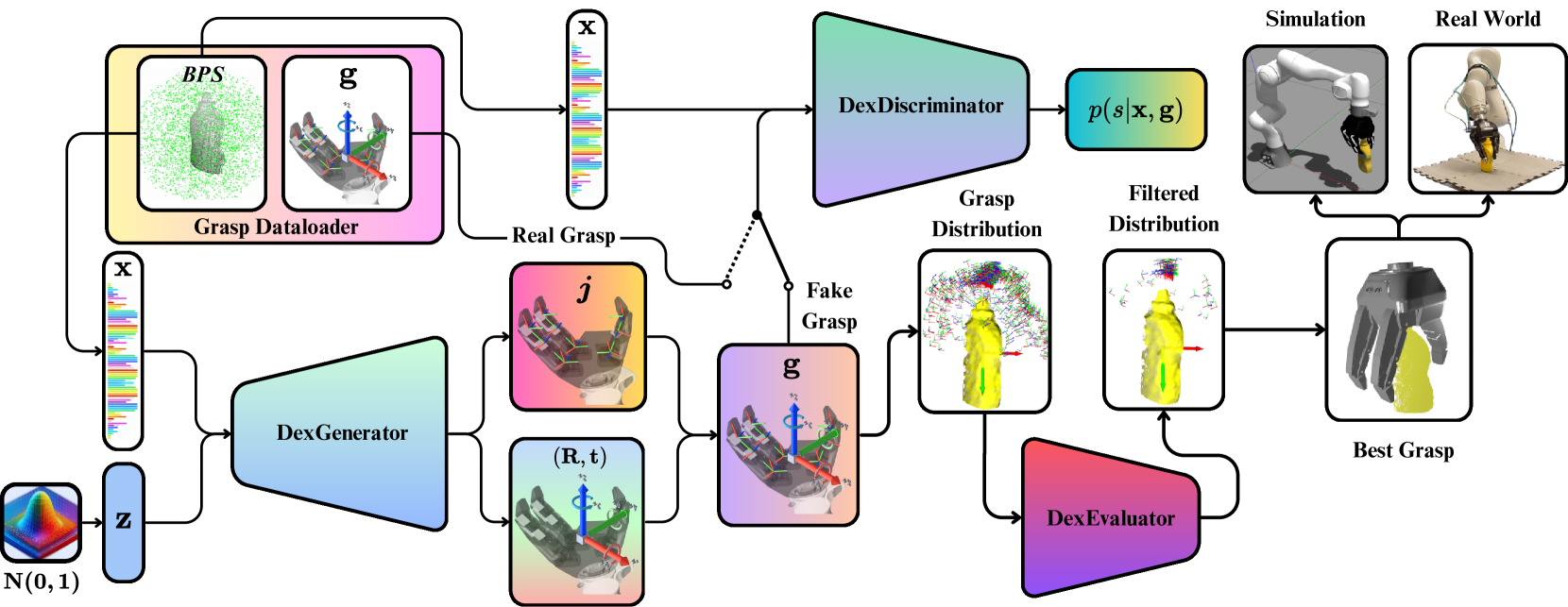
DexGANGrasp: Dexterous Generative Adversarial Grasping Synthesis for Task-Oriented Manipulation
Qian Feng, David S. Martinez Lema, Mohammadhossein Malmir, Hang Li, Jianxiang Feng, Zhaopeng Chen, Alois Knoll
We introduce DexGanGrasp, a dexterous grasping synthesis method that generates and evaluates grasps with single view in real time. DexGanGrasp comprises a Conditional Generative Adversarial Networks (cGANs)-based DexGenerator to generate dexterous grasps and a discriminator-like DexEvalautor to assess the stability of these grasps. Extensive simulation and real-world expriments showcases the effectiveness of our proposed method, outperforming the baseline FFHNet with an 18.57% higher success rate in real-world evaluation. We further extend DexGanGrasp to DexAfford-Prompt, an open-vocabulary affordance grounding pipeline for dexterous grasping leveraging Multimodal Large Language Models (MLLMs) and Vision Language Models (VLMs), to achieve task-oriented grasping with successful real-world deployments.
Read more7/25/2024