Diff-RNTraj: A Structure-aware Diffusion Model for Road Network-constrained Trajectory Generation

0

Sign in to get full access
Overview
- A diffusion model for generating road network-constrained trajectories
- Incorporates structural information about the road network to guide the diffusion process
- Demonstrates improved performance compared to baseline methods on real-world datasets
Plain English Explanation
This research paper introduces a new diffusion model for generating trajectories that are constrained by a road network. Diffusion models are a type of machine learning technique that can be used to synthesize new data, like images or trajectories, by gradually adding noise to the data and then learning how to reverse the process.
The key innovation in this work is that the diffusion model incorporates structural information about the underlying road network. This allows the model to generate trajectories that naturally follow the roads, rather than cutting across open areas. The authors show that this structure-aware approach leads to better performance on real-world datasets compared to baseline methods that don't consider the road network.
Technical Explanation
The paper presents a new diffusion model architecture called "Diff-RNTraj" that is designed for road network-constrained trajectory generation. The model takes as input a road network representation and uses it to guide the diffusion process that generates the final trajectories.
Specifically, the model uses a graph neural network to encode the road network structure, and then integrates this information into the diffusion model through a series of attention mechanisms. This allows the model to be aware of the underlying road network topology and generate trajectories that naturally follow the roads.
The authors evaluate Diff-RNTraj on several real-world trajectory datasets and show that it outperforms baseline approaches that do not explicitly consider the road network constraints. They analyze the model's performance across different metrics, including trajectory realism, efficiency, and diversity.
Critical Analysis
The paper presents a well-designed and thoroughly evaluated diffusion model for road network-constrained trajectory generation. The authors' key insight of incorporating structural information about the road network is compelling and leads to meaningful performance improvements.
One potential limitation is that the model assumes the road network is known a priori, which may not always be the case in real-world applications. An interesting direction for future work could be to explore ways of learning the road network structure directly from data, rather than requiring it as an input.
Additionally, the paper focuses on evaluating the model's performance on trajectory-level metrics, but does not provide much analysis on the quality or realism of the individual trajectories generated. Further user studies or qualitative assessments could help validate the practical usefulness of the approach.
Overall, this is a strong contribution that demonstrates the value of incorporating domain-specific structural information into diffusion models for trajectory generation tasks. The techniques developed here could be applicable to a range of other constrained data synthesis problems beyond just road networks.
Conclusion
This research paper introduces a novel diffusion model for generating road network-constrained trajectories. By incorporating structural information about the underlying road network, the model is able to produce more realistic and efficient trajectories compared to baseline approaches.
The key insights and technical innovations presented in this work could have important implications for a variety of applications, such as autonomous navigation, urban planning, and transportation modeling. As diffusion models continue to gain popularity in the machine learning community, this research highlights the value of domain-specific adaptations that leverage problem-specific structure and constraints.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Diff-RNTraj: A Structure-aware Diffusion Model for Road Network-constrained Trajectory Generation
Tonglong Wei, Youfang Lin, Shengnan Guo, Yan Lin, Yiheng Huang, Chenyang Xiang, Yuqing Bai, Huaiyu Wan
Trajectory data is essential for various applications as it records the movement of vehicles. However, publicly available trajectory datasets remain limited in scale due to privacy concerns, which hinders the development of trajectory data mining and trajectory-based applications. To address this issue, some methods for generating synthetic trajectories have been proposed to expand the scale of the dataset. However, all existing methods generate trajectories in the geographical coordinate system, which poses two limitations for their utilization in practical applications: 1) the inability to ensure that the generated trajectories are constrained on the road. 2) the lack of road-related information. In this paper, we propose a new problem to meet the practical application need, emph{i.e.}, road network-constrained trajectory (RNTraj) generation, which can directly generate trajectories on the road network with road-related information. RNTraj is a hybrid type of data, in which each point is represented by a discrete road segment and a continuous moving rate. To generate RNTraj, we design a diffusion model called Diff-RNTraj. This model can effectively handle the hybrid RNTraj using a continuous diffusion framework by incorporating a pre-training strategy to embed hybrid RNTraj into continuous representations. During the sampling stage, a RNTraj decoder is designed to map the continuous representation generated by the diffusion model back to the hybrid RNTraj format. Furthermore, Diff-RNTraj introduces a novel loss function to enhance the spatial validity of the generated trajectories. Extensive experiments conducted on two real-world trajectory datasets demonstrate the effectiveness of the proposed model.
Read more9/12/2024
0
Constraint-Aware Diffusion Models for Trajectory Optimization
Anjian Li, Zihan Ding, Adji Bousso Dieng, Ryne Beeson
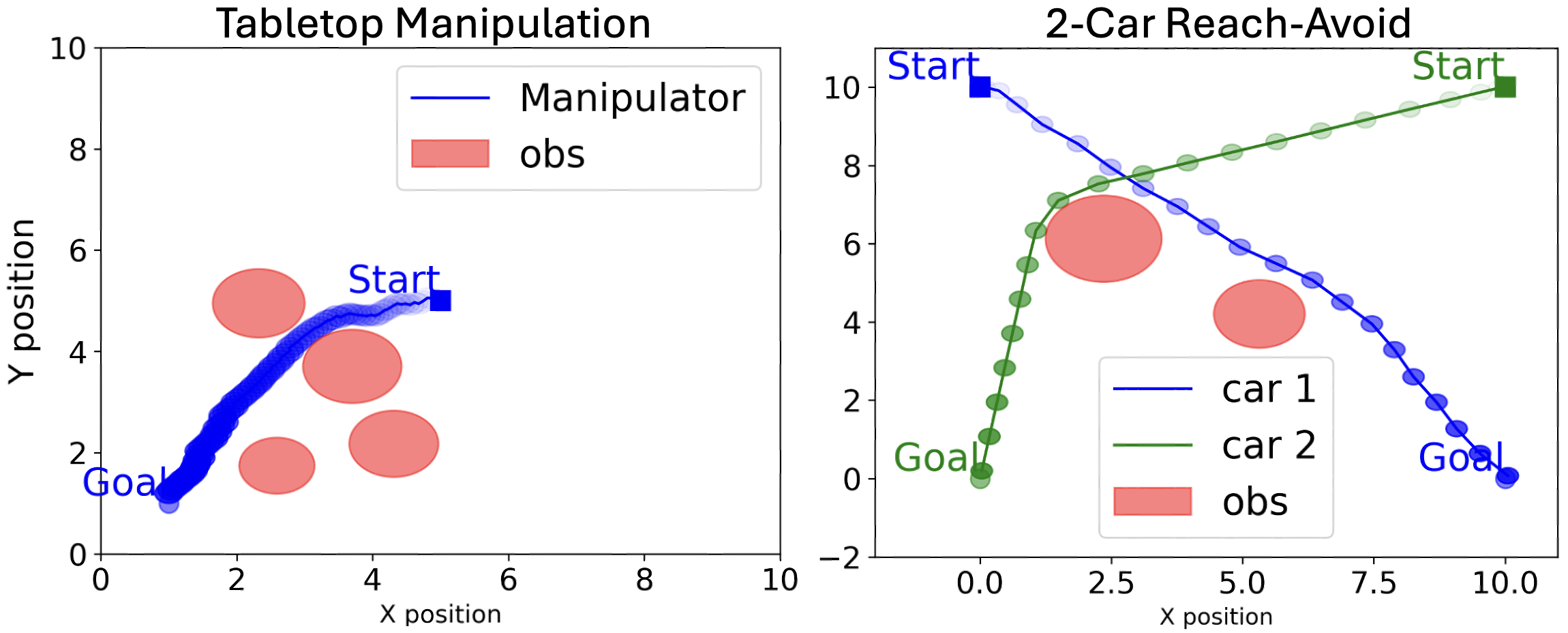
The diffusion model has shown success in generating high-quality and diverse solutions to trajectory optimization problems. However, diffusion models with neural networks inevitably make prediction errors, which leads to constraint violations such as unmet goals or collisions. This paper presents a novel constraint-aware diffusion model for trajectory optimization. We introduce a novel hybrid loss function for training that minimizes the constraint violation of diffusion samples compared to the groundtruth while recovering the original data distribution. Our model is demonstrated on tabletop manipulation and two-car reach-avoid problems, outperforming traditional diffusion models in minimizing constraint violations while generating samples close to locally optimal solutions.
Read more6/4/2024

0
DTG : Diffusion-based Trajectory Generation for Mapless Global Navigation
Jing Liang, Amirreza Payandeh, Daeun Song, Xuesu Xiao, Dinesh Manocha
We present a novel end-to-end diffusion-based trajectory generation method, DTG, for mapless global navigation in challenging outdoor scenarios with occlusions and unstructured off-road features like grass, buildings, bushes, etc. Given a distant goal, our approach computes a trajectory that satisfies the following goals: (1) minimize the travel distance to the goal; (2) maximize the traversability by choosing paths that do not lie in undesirable areas. Specifically, we present a novel Conditional RNN(CRNN) for diffusion models to efficiently generate trajectories. Furthermore, we propose an adaptive training method that ensures that the diffusion model generates more traversable trajectories. We evaluate our methods in various outdoor scenes and compare the performance with other global navigation algorithms on a Husky robot. In practice, we observe at least a 15% improvement in traveling distance and around a 7% improvement in traversability.
Read more9/4/2024
0
Diffusion Models as Optimizers for Efficient Planning in Offline RL
Renming Huang, Yunqiang Pei, Guoqing Wang, Yangming Zhang, Yang Yang, Peng Wang, Hengtao Shen
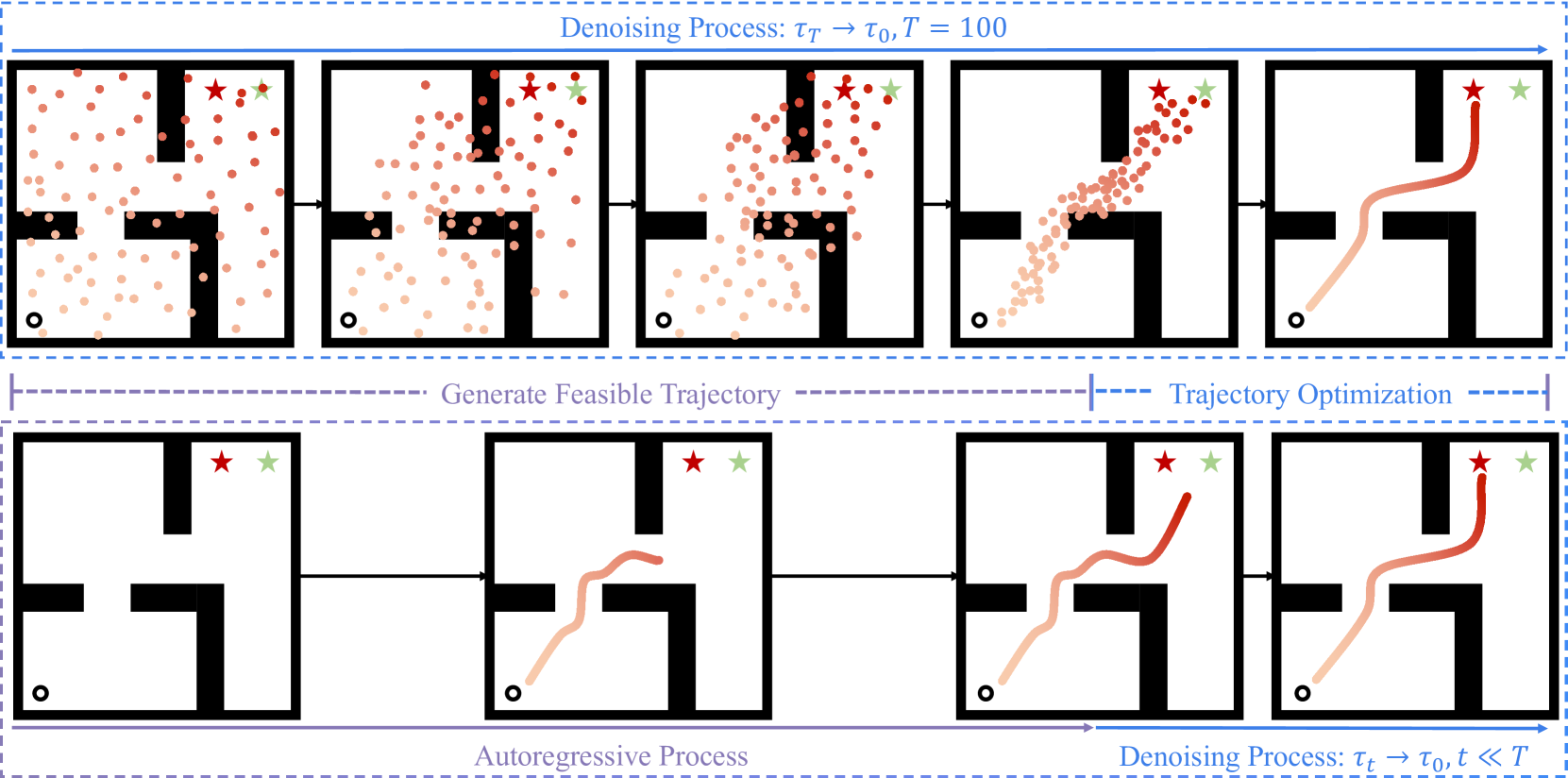
Diffusion models have shown strong competitiveness in offline reinforcement learning tasks by formulating decision-making as sequential generation. However, the practicality of these methods is limited due to the lengthy inference processes they require. In this paper, we address this problem by decomposing the sampling process of diffusion models into two decoupled subprocesses: 1) generating a feasible trajectory, which is a time-consuming process, and 2) optimizing the trajectory. With this decomposition approach, we are able to partially separate efficiency and quality factors, enabling us to simultaneously gain efficiency advantages and ensure quality assurance. We propose the Trajectory Diffuser, which utilizes a faster autoregressive model to handle the generation of feasible trajectories while retaining the trajectory optimization process of diffusion models. This allows us to achieve more efficient planning without sacrificing capability. To evaluate the effectiveness and efficiency of the Trajectory Diffuser, we conduct experiments on the D4RL benchmarks. The results demonstrate that our method achieves $it 3$-$it 10 times$ faster inference speed compared to previous sequence modeling methods, while also outperforming them in terms of overall performance. https://github.com/RenMing-Huang/TrajectoryDiffuser Keywords: Reinforcement Learning and Efficient Planning and Diffusion Model
Read more7/24/2024