DTG : Diffusion-based Trajectory Generation for Mapless Global Navigation

0

Sign in to get full access
Overview
- The provided paper presents a new technique called Diffusion-based Trajectory Generation (DTG) for mapless global navigation.
- DTG uses a diffusion-based approach to generate trajectories for robots without relying on a pre-built map.
- The paper evaluates DTG's performance on both simulated and real-world navigation tasks.
Plain English Explanation
Diffusion models are a type of machine learning model that can be used to generate new data by "diffusing" or spreading out from an initial set of data. In this paper, the researchers apply diffusion models to the problem of trajectory generation for robot navigation.
Traditional navigation systems often rely on having a detailed map of the environment. However, creating and maintaining these maps can be time-consuming and expensive. The researchers' DTG approach allows robots to navigate without a pre-built map by using diffusion models to generate feasible trajectories.
The key idea is to train the diffusion model on a dataset of example trajectories. Once trained, the model can then generate new trajectories that are similar to the training data, but adapted to the robot's current environment and goals. This allows the robot to navigate effectively without needing a full map of the surroundings.
Technical Explanation
The paper introduces the DTG approach for mapless global navigation. DTG uses a conditional diffusion model to generate trajectories that are tailored to the robot's current state and environment.
The diffusion model is trained on a dataset of example trajectories. During deployment, the model takes in the robot's current state (position, velocity, etc.) and a goal location as input. It then generates a sequence of waypoints that the robot can follow to reach the goal, without relying on a pre-built map.
The researchers evaluate DTG on both simulated and real-world navigation tasks. In simulation, they show that DTG can generate collision-free trajectories and outperform traditional planning approaches. In the real-world experiments, a mobile robot successfully navigates through indoor and outdoor environments using the DTG-generated trajectories.
Critical Analysis
The paper presents a promising approach for mapless navigation using diffusion models. By training on example trajectories, the DTG model is able to generate feasible paths without requiring a full map of the environment.
However, the paper acknowledges some limitations of the current work. For example, the model assumes the environment is static and does not account for dynamic obstacles. Additionally, the training data used in the experiments may not capture the full diversity of real-world environments.
Further research could explore ways to make the diffusion model more robust to changes in the environment, such as by incorporating sensor feedback or learning from interactions with the environment. Integrating DTG with other navigation techniques, like vision-language models, could also be a promising direction.
Overall, the DTG approach represents an interesting step towards more flexible and scalable robot navigation systems that do not rely on pre-built maps.
Conclusion
The Diffusion-based Trajectory Generation (DTG) technique presented in this paper offers a novel approach to mapless global navigation for robots. By using a diffusion model trained on example trajectories, DTG can generate collision-free paths without requiring a detailed map of the environment.
The researchers demonstrate the effectiveness of DTG through both simulation and real-world experiments, showing that it can outperform traditional planning-based methods. While the current work has some limitations, the DTG approach represents an exciting development in the field of robot navigation that could lead to more flexible and scalable systems in the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
DTG : Diffusion-based Trajectory Generation for Mapless Global Navigation
Jing Liang, Amirreza Payandeh, Daeun Song, Xuesu Xiao, Dinesh Manocha
We present a novel end-to-end diffusion-based trajectory generation method, DTG, for mapless global navigation in challenging outdoor scenarios with occlusions and unstructured off-road features like grass, buildings, bushes, etc. Given a distant goal, our approach computes a trajectory that satisfies the following goals: (1) minimize the travel distance to the goal; (2) maximize the traversability by choosing paths that do not lie in undesirable areas. Specifically, we present a novel Conditional RNN(CRNN) for diffusion models to efficiently generate trajectories. Furthermore, we propose an adaptive training method that ensures that the diffusion model generates more traversable trajectories. We evaluate our methods in various outdoor scenes and compare the performance with other global navigation algorithms on a Husky robot. In practice, we observe at least a 15% improvement in traveling distance and around a 7% improvement in traversability.
Read more9/4/2024

0
TGS: Trajectory Generation and Selection using Vision Language Models in Mapless Outdoor Environments
Daeun Song, Jing Liang, Xuesu Xiao, Dinesh Manocha
We present a multi-modal trajectory generation and selection algorithm for real-world mapless outdoor navigation in challenging scenarios with unstructured off-road features like buildings, grass, and curbs. Our goal is to compute suitable trajectories that (1) satisfy the environment-specific traversability constraints and (2) generate human-like paths while navigating in crosswalks, sidewalks, etc. Our formulation uses a Conditional Variational Autoencoder (CVAE) generative model enhanced with traversability constraints to generate multiple candidate trajectories for global navigation. We use VLMs and a visual prompting approach with their zero-shot ability of semantic understanding and logical reasoning to choose the best trajectory given the contextual information about the task. We evaluate our methods in various outdoor scenes with wheeled robots and compare the performance with other global navigation algorithms. In practice, we observe at least 3.35% improvement in traversability and 20.61% improvement in terms of human-like navigation in generated trajectories in challenging outdoor navigation scenarios.
Read more8/9/2024

0
Diff-RNTraj: A Structure-aware Diffusion Model for Road Network-constrained Trajectory Generation
Tonglong Wei, Youfang Lin, Shengnan Guo, Yan Lin, Yiheng Huang, Chenyang Xiang, Yuqing Bai, Huaiyu Wan
Trajectory data is essential for various applications as it records the movement of vehicles. However, publicly available trajectory datasets remain limited in scale due to privacy concerns, which hinders the development of trajectory data mining and trajectory-based applications. To address this issue, some methods for generating synthetic trajectories have been proposed to expand the scale of the dataset. However, all existing methods generate trajectories in the geographical coordinate system, which poses two limitations for their utilization in practical applications: 1) the inability to ensure that the generated trajectories are constrained on the road. 2) the lack of road-related information. In this paper, we propose a new problem to meet the practical application need, emph{i.e.}, road network-constrained trajectory (RNTraj) generation, which can directly generate trajectories on the road network with road-related information. RNTraj is a hybrid type of data, in which each point is represented by a discrete road segment and a continuous moving rate. To generate RNTraj, we design a diffusion model called Diff-RNTraj. This model can effectively handle the hybrid RNTraj using a continuous diffusion framework by incorporating a pre-training strategy to embed hybrid RNTraj into continuous representations. During the sampling stage, a RNTraj decoder is designed to map the continuous representation generated by the diffusion model back to the hybrid RNTraj format. Furthermore, Diff-RNTraj introduces a novel loss function to enhance the spatial validity of the generated trajectories. Extensive experiments conducted on two real-world trajectory datasets demonstrate the effectiveness of the proposed model.
Read more9/12/2024
0
Constraint-Aware Diffusion Models for Trajectory Optimization
Anjian Li, Zihan Ding, Adji Bousso Dieng, Ryne Beeson
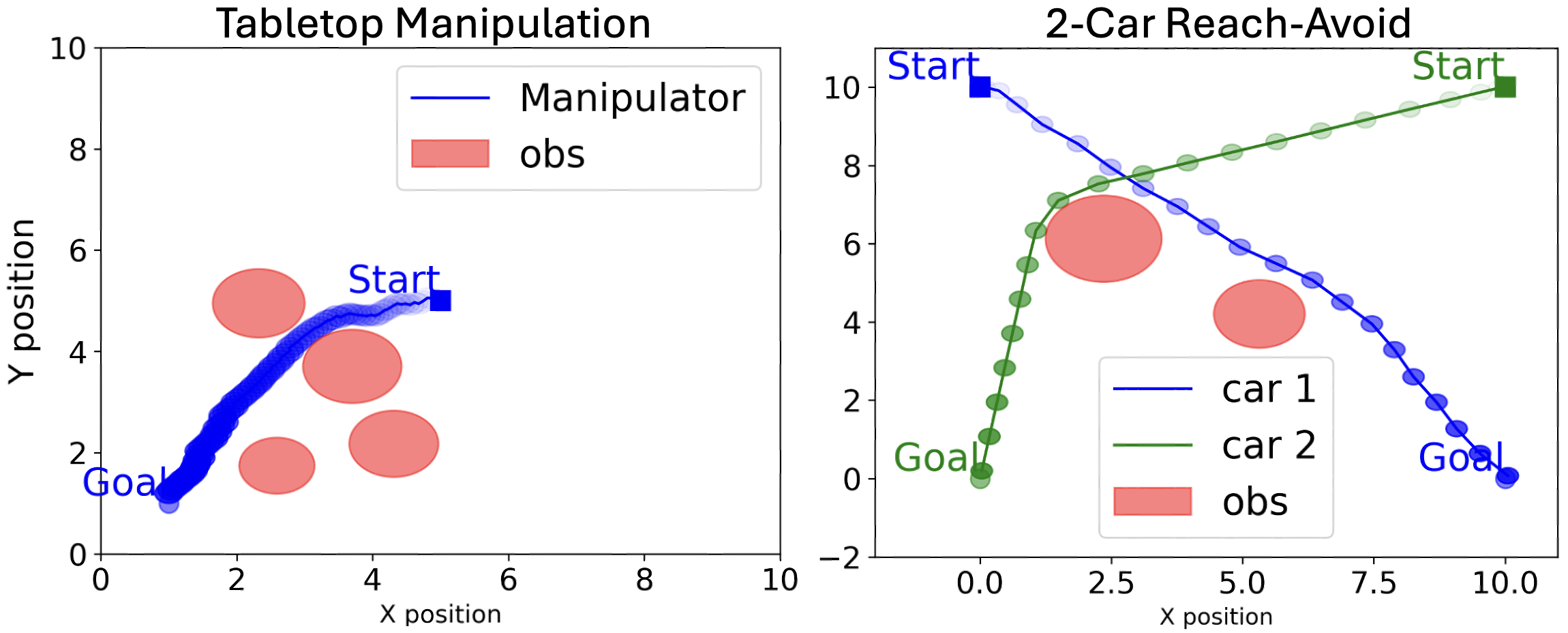
The diffusion model has shown success in generating high-quality and diverse solutions to trajectory optimization problems. However, diffusion models with neural networks inevitably make prediction errors, which leads to constraint violations such as unmet goals or collisions. This paper presents a novel constraint-aware diffusion model for trajectory optimization. We introduce a novel hybrid loss function for training that minimizes the constraint violation of diffusion samples compared to the groundtruth while recovering the original data distribution. Our model is demonstrated on tabletop manipulation and two-car reach-avoid problems, outperforming traditional diffusion models in minimizing constraint violations while generating samples close to locally optimal solutions.
Read more6/4/2024