Differentiable Predictive Control for Large-Scale Urban Road Networks
2406.10433
0
0

Abstract
Transportation is a major contributor to CO2 emissions, making it essential to optimize traffic networks to reduce energy-related emissions. This paper presents a novel approach to traffic network control using Differentiable Predictive Control (DPC), a physics-informed machine learning methodology. We base our model on the Macroscopic Fundamental Diagram (MFD) and the Networked Macroscopic Fundamental Diagram (NMFD), offering a simplified representation of citywide traffic networks. Our approach ensures compliance with system constraints by construction. In empirical comparisons with existing state-of-the-art Model Predictive Control (MPC) methods, our approach demonstrates a 4 order of magnitude reduction in computation time and an up to 37% improvement in traffic performance. Furthermore, we assess the robustness of our controller to scenario shifts and find that it adapts well to changes in traffic patterns. This work proposes more efficient traffic control methods, particularly in large-scale urban networks, and aims to mitigate emissions and alleviate congestion in the future.
Create account to get full access
Overview
- This paper presents a novel approach called Differentiable Predictive Control (DPC) for traffic flow control in large-scale urban road networks.
- The research was funded in part by the Advanced Research Projects Agency-Energy (ARPA-E) of the U.S. Department of Energy.
- The work may contain subject inventions with pending intellectual property at the United States Patent and Trademark Office.
Plain English Explanation
The paper describes a new technique called Differentiable Predictive Control (DPC) that can be used to manage and optimize the flow of traffic in large, complex urban road networks. This is an important problem because traffic congestion in cities causes significant economic and environmental costs.
The DPC approach uses a physics-informed model to predict how traffic will behave and then adjusts traffic signals and other controls to keep traffic flowing smoothly. By making the model "differentiable," the researchers were able to use powerful optimization techniques to find the best control strategies. This allows the system to quickly adapt to changing traffic conditions in real-time.
The work was funded by the U.S. Department of Energy's Advanced Research Projects Agency-Energy (ARPA-E), which suggests the research could have implications for energy efficiency and sustainability in transportation. The paper also notes that the research may lead to patentable inventions in this domain.
Technical Explanation
The paper introduces a novel Differentiable Predictive Control (DPC) framework for large-scale urban road network traffic flow control. The DPC approach uses a physics-informed model to predict the evolution of traffic, and then employs gradient-based optimization to find the best control actions (e.g. traffic signal timings) that minimize a given objective function.
By making the traffic model differentiable, the researchers were able to leverage powerful gradient-based optimization techniques to efficiently search for optimal control policies. This allows the system to rapidly adapt to changing traffic conditions, unlike traditional approaches that rely on heuristics or less flexible optimization methods.
The authors demonstrate the effectiveness of DPC through large-scale simulations of an urban road network with thousands of roads and intersections. They show that DPC can significantly outperform state-of-the-art model predictive control and reinforcement learning based traffic control approaches in terms of reducing congestion and travel times.
Critical Analysis
The paper presents a compelling approach to large-scale urban traffic flow control, but there are a few potential limitations and areas for further research:
-
The traffic model used in DPC, while physics-informed, may still have simplifications or assumptions that limit its accuracy in capturing complex real-world traffic dynamics. Validating the model against real-world data would be an important next step.
-
The paper focuses on centralized control of the road network. Developing decentralized or distributed control strategies could improve scalability and resilience to failures.
-
The objective function used in the optimization process prioritizes reducing congestion and travel times. Incorporating additional objectives, such as energy efficiency or emissions reduction, could make the approach more holistic.
-
While the simulations demonstrate the potential of DPC, real-world deployment would face additional challenges, such as integration with existing infrastructure and handling sensor failures or communication disruptions.
Overall, the Differentiable Predictive Control framework represents an exciting advance in the field of urban traffic management and control. Further research and real-world testing will be crucial to realizing the full potential of this approach.
Conclusion
This paper presents a novel Differentiable Predictive Control (DPC) framework for optimizing traffic flow in large-scale urban road networks. By using a differentiable, physics-informed traffic model, the DPC approach can quickly find the best control actions to minimize congestion and travel times.
The research, funded by the U.S. Department of Energy's ARPA-E program, has the potential to contribute to more energy-efficient and sustainable transportation systems in cities. While the simulations demonstrate promising results, validating the approach in real-world deployments and addressing potential limitations will be important next steps.
Overall, the DPC framework represents an innovative and impactful advance in the field of intelligent transportation systems, with applications that could improve mobility, reduce environmental impact, and enhance the livability of cities around the world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Highway Discretionary Lane-change Decision and Control Using Model Predictive Control
Zishun Zheng, Yihan Wang, Yuan Lin
0
0
To enable autonomous vehicles to perform discretionary lane change amidst the random traffic flow on highways, this paper introduces a decision-making and control method for vehicle lane change based on Model Predictive Control (MPC). This approach divides the driving control of vehicles on highways into two parts: lane-change decision and lane-change control, both of which are solved using the MPC method. In the lanechange decision module, the minimum driving costs for each lane are computed and compared by solving the MPC problem to make lane-change decisions. In the lane-change control module, a dynamic bicycle model is incorporated, and a multi-objective cost function is designed to obtain the optimal control inputs for the lane-change process. Additionally, A long-short term memory (LSTM) model is used to predict the trajectories of surrounding vehicles for both the MPC decision and control modules. The proposed lane-change decision and control method is simulated and validated in a driving simulator under random highway traffic conditions.
4/4/2024
Scalable Multi-modal Model Predictive Control via Duality-based Interaction Predictions
Hansung Kim, Siddharth H. Nair, Francesco Borrelli
0
0
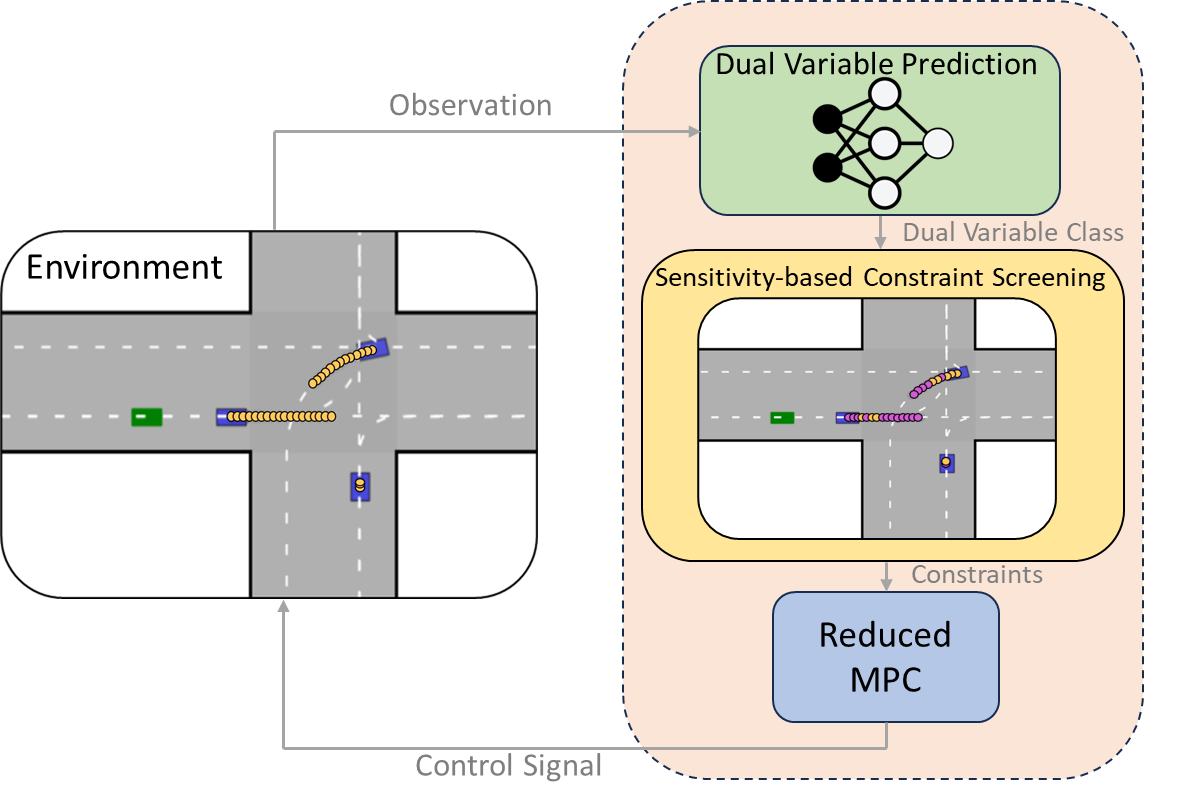
We propose a hierarchical architecture designed for scalable real-time Model Predictive Control (MPC) in complex, multi-modal traffic scenarios. This architecture comprises two key components: 1) RAID-Net, a novel attention-based Recurrent Neural Network that predicts relevant interactions along the MPC prediction horizon between the autonomous vehicle and the surrounding vehicles using Lagrangian duality, and 2) a reduced Stochastic MPC problem that eliminates irrelevant collision avoidance constraints, enhancing computational efficiency. Our approach is demonstrated in a simulated traffic intersection with interactive surrounding vehicles, showcasing a 12x speed-up in solving the motion planning problem. A video demonstrating the proposed architecture in multiple complex traffic scenarios can be found here: https://youtu.be/-pRiOnPb9_c. GitHub: https://github.com/MPC-Berkeley/hmpc_raidnet
6/4/2024
🏅
Reinforcement Learning with Model Predictive Control for Highway Ramp Metering
Filippo Airaldi, Bart De Schutter, Azita Dabiri
0
0
In the backdrop of an increasingly pressing need for effective urban and highway transportation systems, this work explores the synergy between model-based and learning-based strategies to enhance traffic flow management by use of an innovative approach to the problem of ramp metering control that embeds Reinforcement Learning (RL) techniques within the Model Predictive Control (MPC) framework. The control problem is formulated as an RL task by crafting a suitable stage cost function that is representative of the traffic conditions, variability in the control action, and violations of the constraint on the maximum number of vehicles in queue. An MPC-based RL approach, which leverages the MPC optimal problem as a function approximation for the RL algorithm, is proposed to learn to efficiently control an on-ramp and satisfy its constraints despite uncertainties in the system model and variable demands. Simulations are performed on a benchmark small-scale highway network to compare the proposed methodology against other state-of-the-art control approaches. Results show that, starting from an MPC controller that has an imprecise model and is poorly tuned, the proposed methodology is able to effectively learn to improve the control policy such that congestion in the network is reduced and constraints are satisfied, yielding an improved performance that is superior to the other controllers.
5/22/2024
📈
Model Predictive Control of District Heating Grids Using Stabilizing Terminal Ingredients
Max Rose, Hannes Gernandt, Juan E. Machado, Johannes Schiffer
0
0
The transformation of fossil fuel-based district heating grids (DHGs) to CO$_2$-neutral DHGs requires the development of novel operating strategies. Model predictive control (MPC) is a promising approach, as knowledge about future heat demand and heat supply can be incorporated into the control, operating constraints can be ensured and the stability of the closed-loop system can be guaranteed. In this paper, we employ MPC for DHGs to control the system mass flows and injected heat flows. Following common practice, we derive terminal ingredients to stabilize given steady state temperatures and storage masses in the DHG. To apply MPC with terminal ingredients, it is crucial that the system under control is stabilizable. By exploiting the particular system structure, we give a sufficient condition for the stabilizability in terms of the grid topology and hence, for the applicability of the MPC scheme to DHGs. Furthermore, we demonstrate the practicability of the application of MPC to an exemplary DHG in a numerical case study.
4/3/2024