Reinforcement Learning with Model Predictive Control for Highway Ramp Metering

0
🏅
Sign in to get full access
Overview
- The paper explores the synergy between model-based and learning-based strategies to improve traffic flow management using an innovative approach to ramp metering control.
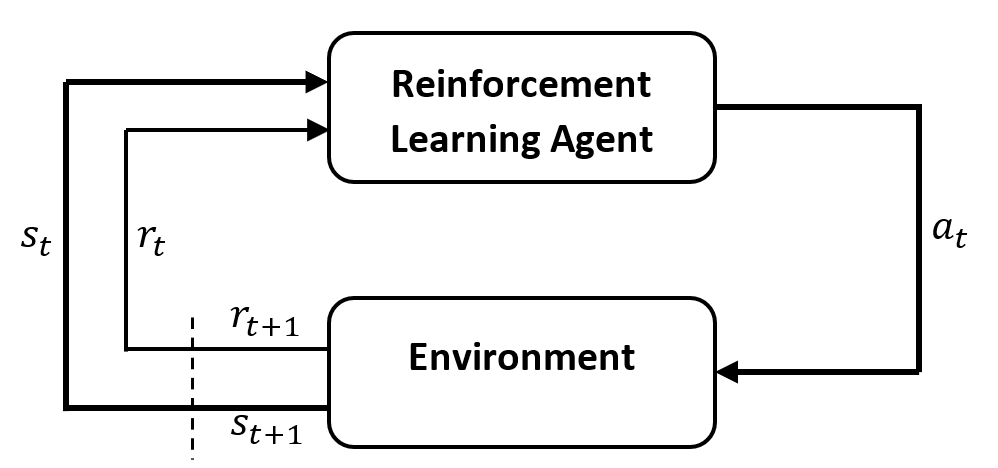
- The control problem is formulated as a Reinforcement Learning (RL) task, with a cost function that considers traffic conditions, control action variability, and queue constraints.
- The proposed approach embeds RL techniques within a Model Predictive Control (MPC) framework, leveraging the MPC optimization problem as a function approximation for the RL algorithm.
- Simulations on a small-scale highway network show the proposed methodology can effectively learn to improve the control policy, reducing congestion and satisfying constraints, outperforming other state-of-the-art control approaches.
Plain English Explanation
Traffic congestion is a significant problem in many urban and highway transportation systems. This research paper presents an innovative approach to address this issue by combining two powerful techniques: Model Predictive Control (MPC) and Reinforcement Learning (RL).
The key idea is to use RL to learn how to control the flow of vehicles entering a highway from on-ramps (a process known as "ramp metering"). The researchers formulate this control problem as an RL task, where the goal is to find the best way to adjust the rate at which vehicles are allowed to enter the highway. This is done by defining a cost function that takes into account factors like the current traffic conditions, the variability in the control actions, and the maximum number of vehicles allowed to queue up on the on-ramp.
The researchers then integrate the RL approach within an MPC framework. MPC is a model-based control technique that uses a mathematical model of the system to predict its future behavior and determine the best control actions. By embedding the RL algorithm within the MPC optimization problem, the researchers can leverage the strengths of both approaches: the model-based optimization of MPC and the learning capabilities of RL.
Through simulations on a small-scale highway network, the researchers show that this combined MPC-RL approach can effectively learn to improve the control policy, reducing congestion and satisfying the constraints on the number of vehicles in the queue. The performance of this method is superior to other state-of-the-art control approaches, even when the MPC controller has an imprecise model and is poorly tuned.
Technical Explanation
The researchers formulate the ramp metering control problem as an RL task, where the goal is to learn a control policy that maximizes a stage cost function. This cost function is designed to represent the trade-off between minimizing congestion (by maximizing the flow of vehicles on the highway), reducing variability in the control actions (to ensure a smooth and stable control policy), and satisfying the constraint on the maximum number of vehicles allowed to queue on the on-ramp.
To solve this RL problem, the researchers propose an MPC-based RL approach. This involves embedding the RL algorithm within the MPC optimization problem, using the MPC optimal problem as a function approximation for the RL algorithm. This allows the RL agent to leverage the model-based optimization capabilities of MPC while still learning to improve the control policy.
The researchers evaluate their proposed methodology on a benchmark small-scale highway network, comparing its performance against other state-of-the-art control approaches, such as actor-critic MPC and MPC-based value estimation. The results show that the proposed MPC-RL approach is able to effectively learn to improve the control policy, even when the MPC controller has an imprecise model and is poorly tuned. This leads to a reduction in congestion and satisfaction of the constraints, resulting in an improved overall performance compared to the other controllers.
Critical Analysis
The paper presents a promising approach for improving traffic flow management through the integration of model-based and learning-based techniques. The authors have carefully designed the RL task and the MPC-RL framework to address the specific challenges of ramp metering control, such as satisfying the queue constraint and minimizing control action variability.
One potential limitation of the research is that it has been evaluated on a relatively small-scale highway network. It would be valuable to see how the proposed methodology scales and performs on larger, more complex transportation networks, which are often the real-world setting for these types of control problems.
Additionally, the paper does not provide a detailed sensitivity analysis of the RL algorithm's hyperparameters and the impact of the cost function design on the overall performance. Exploring these aspects could help further understand the robustness and generalizability of the proposed approach.
Another area for future research could be to investigate the integration of the MPC-RL framework with other traffic management strategies, such as discretionary lane change control or multi-modal control, to develop more comprehensive and coordinated transportation management solutions.
Conclusion
This research paper presents an innovative approach to traffic flow management that combines model-based and learning-based techniques. By formulating the ramp metering control problem as an RL task and embedding it within an MPC framework, the researchers have developed a methodology that can effectively learn to improve the control policy, leading to reduced congestion and satisfaction of system constraints.
The results of the simulation studies demonstrate the potential of this MPC-RL approach to outperform other state-of-the-art control strategies, even when the underlying MPC controller has an imprecise model and is poorly tuned. This highlights the synergistic benefits of integrating RL and MPC, which can be a valuable tool for enhancing the efficiency and robustness of urban and highway transportation systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏅
0
Reinforcement Learning with Model Predictive Control for Highway Ramp Metering
Filippo Airaldi, Bart De Schutter, Azita Dabiri
In the backdrop of an increasingly pressing need for effective urban and highway transportation systems, this work explores the synergy between model-based and learning-based strategies to enhance traffic flow management by use of an innovative approach to the problem of ramp metering control that embeds Reinforcement Learning (RL) techniques within the Model Predictive Control (MPC) framework. The control problem is formulated as an RL task by crafting a suitable stage cost function that is representative of the traffic conditions, variability in the control action, and violations of the constraint on the maximum number of vehicles in queue. An MPC-based RL approach, which leverages the MPC optimal problem as a function approximation for the RL algorithm, is proposed to learn to efficiently control an on-ramp and satisfy its constraints despite uncertainties in the system model and variable demands. Simulations are performed on a benchmark small-scale highway network to compare the proposed methodology against other state-of-the-art control approaches. Results show that, starting from an MPC controller that has an imprecise model and is poorly tuned, the proposed methodology is able to effectively learn to improve the control policy such that congestion in the network is reduced and constraints are satisfied, yielding an improved performance that is superior to the other controllers.
Read more5/22/2024

0
Highway Discretionary Lane-change Decision and Control Using Model Predictive Control
Zishun Zheng, Yihan Wang, Yuan Lin
To enable autonomous vehicles to perform discretionary lane change amidst the random traffic flow on highways, this paper introduces a decision-making and control method for vehicle lane change based on Model Predictive Control (MPC). This approach divides the driving control of vehicles on highways into two parts: lane-change decision and lane-change control, both of which are solved using the MPC method. In the lanechange decision module, the minimum driving costs for each lane are computed and compared by solving the MPC problem to make lane-change decisions. In the lane-change control module, a dynamic bicycle model is incorporated, and a multi-objective cost function is designed to obtain the optimal control inputs for the lane-change process. Additionally, A long-short term memory (LSTM) model is used to predict the trajectories of surrounding vehicles for both the MPC decision and control modules. The proposed lane-change decision and control method is simulated and validated in a driving simulator under random highway traffic conditions.
Read more4/4/2024

0
Integrating Reinforcement Learning and Model Predictive Control with Applications to Microgrids
Caio Fabio Oliveira da Silva, Azita Dabiri, Bart De Schutter
This work proposes an approach that integrates reinforcement learning and model predictive control (MPC) to efficiently solve finite-horizon optimal control problems in mixed-logical dynamical systems. Optimization-based control of such systems with discrete and continuous decision variables entails the online solution of mixed-integer quadratic or linear programs, which suffer from the curse of dimensionality. Our approach aims at mitigating this issue by effectively decoupling the decision on the discrete variables and the decision on the continuous variables. Moreover, to mitigate the combinatorial growth in the number of possible actions due to the prediction horizon, we conceive the definition of decoupled Q-functions to make the learning problem more tractable. The use of reinforcement learning reduces the online optimization problem of the MPC controller from a mixed-integer linear (quadratic) program to a linear (quadratic) program, greatly reducing the computational time. Simulation experiments for a microgrid, based on real-world data, demonstrate that the proposed method significantly reduces the online computation time of the MPC approach and that it generates policies with small optimality gaps and high feasibility rates.
Read more9/18/2024
0
Adaptive Traffic Signal Control Using Reinforcement Learning
Muhammad Tahir Rafique, Ahmed Mustafa, Hasan Sajid
The growing demand for road use in urban areas has led to significant traffic congestion, posing challenges that are costly to mitigate through infrastructure expansion alone. As an alternative, optimizing existing traffic management systems, particularly through adaptive traffic signal control, offers a promising solution. This paper explores the use of Reinforcement Learning (RL) to enhance traffic signal operations at intersections, aiming to reduce congestion without extensive sensor networks. We introduce two RL-based algorithms: a turn-based agent, which dynamically prioritizes traffic signals based on real-time queue lengths, and a time-based agent, which adjusts signal phase durations according to traffic conditions while following a fixed phase cycle. By representing the state as a scalar queue length, our approach simplifies the learning process and lowers deployment costs. The algorithms were tested in four distinct traffic scenarios using seven evaluation metrics to comprehensively assess performance. Simulation results demonstrate that both RL algorithms significantly outperform conventional traffic signal control systems, highlighting their potential to improve urban traffic flow efficiently.
Read more9/4/2024