Highway Discretionary Lane-change Decision and Control Using Model Predictive Control
2402.17524
0
0

Abstract
To enable autonomous vehicles to perform discretionary lane change amidst the random traffic flow on highways, this paper introduces a decision-making and control method for vehicle lane change based on Model Predictive Control (MPC). This approach divides the driving control of vehicles on highways into two parts: lane-change decision and lane-change control, both of which are solved using the MPC method. In the lanechange decision module, the minimum driving costs for each lane are computed and compared by solving the MPC problem to make lane-change decisions. In the lane-change control module, a dynamic bicycle model is incorporated, and a multi-objective cost function is designed to obtain the optimal control inputs for the lane-change process. Additionally, A long-short term memory (LSTM) model is used to predict the trajectories of surrounding vehicles for both the MPC decision and control modules. The proposed lane-change decision and control method is simulated and validated in a driving simulator under random highway traffic conditions.
Create account to get full access
Overview
- This paper presents a model predictive control approach for autonomous vehicle lane change decision and control on highways.
- The researchers developed a system to enable autonomous vehicles to make safe and efficient discretionary lane changes on highways.
- The system uses a model predictive control framework to predict the future states of the vehicle and surrounding traffic, and then selects the optimal lane change maneuver.
- Experiments were conducted in simulation to evaluate the performance of the proposed approach.
Plain English Explanation
Autonomous vehicles need to be able to safely change lanes on highways in order to navigate effectively. This paper describes a new system that helps autonomous vehicles make smart decisions about when and how to change lanes.
The key idea is to use a technique called model predictive control. This involves building a mathematical model of the vehicle and the surrounding traffic. The model can then be used to predict what will happen in the future if the vehicle takes different actions, like changing lanes. The system selects the lane change maneuver that is predicted to be the safest and most efficient.
Imagine you're driving on the highway and want to change lanes. You'd look in your mirrors, check your blind spots, signal, and then carefully merge. This paper's system does something similar, but using sensors and computers instead of a human driver. It can constantly monitor the traffic around the vehicle, predict how other cars will move, and then choose the best time and way to change lanes.
The researchers tested this system in computer simulations to see how well it works. The results showed it was able to make safe and efficient lane changes in a variety of highway driving scenarios.
Technical Explanation
The paper proposes a model predictive control (MPC) framework for autonomous vehicle lane change decision and control on highways. The key components are:
-
Vehicle and surrounding traffic modeling: The researchers developed a dynamical model of the autonomous vehicle as well as models to predict the future motion of nearby vehicles based on their current states and behaviors.
-
Lane change decision: At each time step, the MPC controller evaluates potential future lane change trajectories and selects the optimal one based on criteria like safety, efficiency, and passenger comfort.
-
Tracking control: Once a lane change maneuver is selected, the controller generates the necessary steering and acceleration commands to execute the lane change while tracking the desired trajectory.
The MPC formulation aims to optimize a cost function that balances considerations like lateral and longitudinal safety margins, deviation from the desired velocity, and lateral acceleration. Constraints are also imposed to ensure the feasibility and stability of the planned trajectory.
Simulation experiments were conducted in MATLAB/Simulink to evaluate the proposed approach. The autonomous vehicle was tested in various highway scenarios with different traffic densities and behaviors of surrounding vehicles. The results showed the MPC-based lane change system was able to execute safe and efficient discretionary lane changes compared to a baseline controller.
Critical Analysis
The paper provides a comprehensive MPC-based framework for autonomous vehicle lane change decision and control that seems promising based on the simulation results. However, a few potential limitations and areas for further research are worth noting:
-
The evaluation was conducted purely in simulation, so real-world testing would be needed to fully validate the approach under more complex and uncertain conditions.
-
The vehicle and traffic models used may not perfectly capture all the nuances of real-world driving behavior, which could impact the accuracy of the predictions.
-
The cost function and constraint formulation could be further refined to better capture all the relevant objectives and constraints for safe and comfortable lane changes.
-
Interactions with human-driven vehicles were not considered, which could introduce additional challenges in real-world deployment.
-
The computational complexity of the MPC optimization may limit its applicability for real-time execution on production autonomous vehicles, so further algorithmic improvements may be needed.
Overall, this research represents a valuable contribution towards enabling more sophisticated lane change capabilities for autonomous vehicles. Addressing the above limitations through further work could help bring this technology closer to practical implementation.
Conclusion
This paper presents a model predictive control framework for autonomous vehicle lane change decision and control on highways. By leveraging advanced modeling and optimization techniques, the proposed system is able to plan safe and efficient lane change maneuvers that balance various performance objectives.
The simulation-based evaluation demonstrated the potential of this approach to enable autonomous vehicles to navigate highways more effectively. While some limitations and areas for further research were identified, this work represents an important step forward in enhancing the lane change capabilities of self-driving cars, which is crucial for their widespread adoption and realizing the full benefits of autonomous transportation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Motion Planning under Uncertainty: Integrating Learning-Based Multi-Modal Predictors into Branch Model Predictive Control
Mohamed-Khalil Bouzidi, Bojan Derajic, Daniel Goehring, Joerg Reichardt
0
0
In complex traffic environments, autonomous vehicles face multi-modal uncertainty about other agents' future behavior. To address this, recent advancements in learningbased motion predictors output multi-modal predictions. We present our novel framework that leverages Branch Model Predictive Control(BMPC) to account for these predictions. The framework includes an online scenario-selection process guided by topology and collision risk criteria. This efficiently selects a minimal set of predictions, rendering the BMPC realtime capable. Additionally, we introduce an adaptive decision postponing strategy that delays the planner's commitment to a single scenario until the uncertainty is resolved. Our comprehensive evaluations in traffic intersection and random highway merging scenarios demonstrate enhanced comfort and safety through our method.
5/7/2024
🏅
Reinforcement Learning with Model Predictive Control for Highway Ramp Metering
Filippo Airaldi, Bart De Schutter, Azita Dabiri
0
0
In the backdrop of an increasingly pressing need for effective urban and highway transportation systems, this work explores the synergy between model-based and learning-based strategies to enhance traffic flow management by use of an innovative approach to the problem of ramp metering control that embeds Reinforcement Learning (RL) techniques within the Model Predictive Control (MPC) framework. The control problem is formulated as an RL task by crafting a suitable stage cost function that is representative of the traffic conditions, variability in the control action, and violations of the constraint on the maximum number of vehicles in queue. An MPC-based RL approach, which leverages the MPC optimal problem as a function approximation for the RL algorithm, is proposed to learn to efficiently control an on-ramp and satisfy its constraints despite uncertainties in the system model and variable demands. Simulations are performed on a benchmark small-scale highway network to compare the proposed methodology against other state-of-the-art control approaches. Results show that, starting from an MPC controller that has an imprecise model and is poorly tuned, the proposed methodology is able to effectively learn to improve the control policy such that congestion in the network is reduced and constraints are satisfied, yielding an improved performance that is superior to the other controllers.
5/22/2024
Scalable Multi-modal Model Predictive Control via Duality-based Interaction Predictions
Hansung Kim, Siddharth H. Nair, Francesco Borrelli
0
0
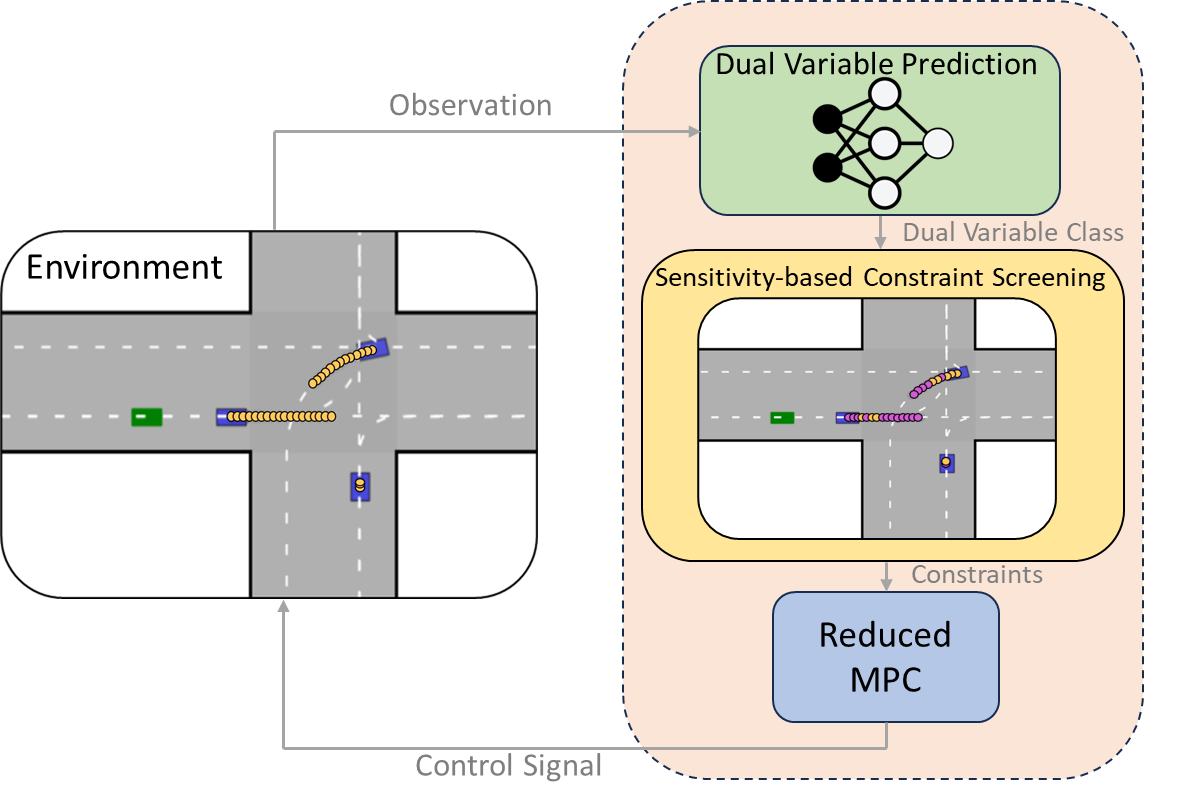
We propose a hierarchical architecture designed for scalable real-time Model Predictive Control (MPC) in complex, multi-modal traffic scenarios. This architecture comprises two key components: 1) RAID-Net, a novel attention-based Recurrent Neural Network that predicts relevant interactions along the MPC prediction horizon between the autonomous vehicle and the surrounding vehicles using Lagrangian duality, and 2) a reduced Stochastic MPC problem that eliminates irrelevant collision avoidance constraints, enhancing computational efficiency. Our approach is demonstrated in a simulated traffic intersection with interactive surrounding vehicles, showcasing a 12x speed-up in solving the motion planning problem. A video demonstrating the proposed architecture in multiple complex traffic scenarios can be found here: https://youtu.be/-pRiOnPb9_c. GitHub: https://github.com/MPC-Berkeley/hmpc_raidnet
6/4/2024

Differentiable Predictive Control for Large-Scale Urban Road Networks
Renukanandan Tumu, Wenceslao Shaw Cortez, J'an Drgov{n}a, Draguna L. Vrabie, Sonja Glavaski
0
0
Transportation is a major contributor to CO2 emissions, making it essential to optimize traffic networks to reduce energy-related emissions. This paper presents a novel approach to traffic network control using Differentiable Predictive Control (DPC), a physics-informed machine learning methodology. We base our model on the Macroscopic Fundamental Diagram (MFD) and the Networked Macroscopic Fundamental Diagram (NMFD), offering a simplified representation of citywide traffic networks. Our approach ensures compliance with system constraints by construction. In empirical comparisons with existing state-of-the-art Model Predictive Control (MPC) methods, our approach demonstrates a 4 order of magnitude reduction in computation time and an up to 37% improvement in traffic performance. Furthermore, we assess the robustness of our controller to scenario shifts and find that it adapts well to changes in traffic patterns. This work proposes more efficient traffic control methods, particularly in large-scale urban networks, and aims to mitigate emissions and alleviate congestion in the future.
6/18/2024