Scalable Multi-modal Model Predictive Control via Duality-based Interaction Predictions
2402.01116
0
0
Abstract
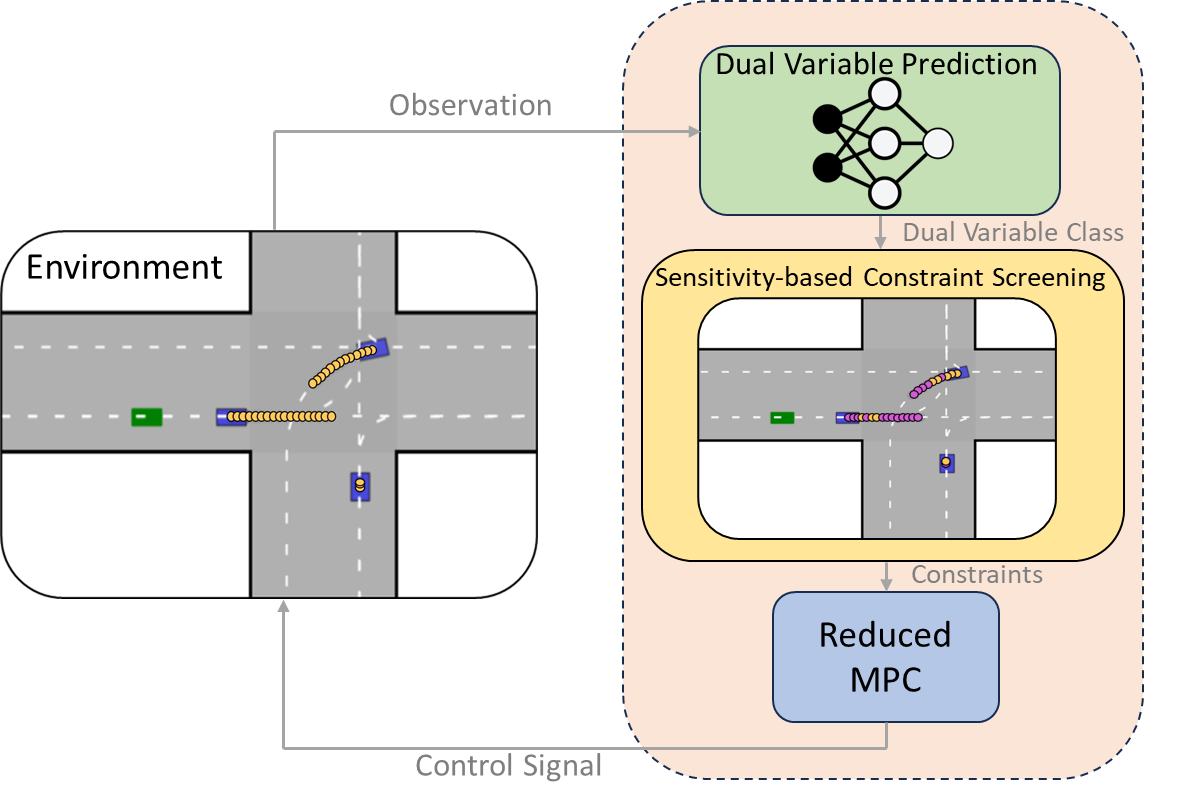
We propose a hierarchical architecture designed for scalable real-time Model Predictive Control (MPC) in complex, multi-modal traffic scenarios. This architecture comprises two key components: 1) RAID-Net, a novel attention-based Recurrent Neural Network that predicts relevant interactions along the MPC prediction horizon between the autonomous vehicle and the surrounding vehicles using Lagrangian duality, and 2) a reduced Stochastic MPC problem that eliminates irrelevant collision avoidance constraints, enhancing computational efficiency. Our approach is demonstrated in a simulated traffic intersection with interactive surrounding vehicles, showcasing a 12x speed-up in solving the motion planning problem. A video demonstrating the proposed architecture in multiple complex traffic scenarios can be found here: https://youtu.be/-pRiOnPb9_c. GitHub: https://github.com/MPC-Berkeley/hmpc_raidnet
Create account to get full access
Overview
- This paper proposes a scalable multi-modal model predictive control (MPC) approach that uses duality-based interaction predictions to enable efficient planning and control for complex, multi-agent systems.
- The key innovation is the use of duality-based interaction predictions to capture the complex dynamics and interactions between different agents or modalities in the system.
- The approach is designed to be scalable and applicable to a wide range of multi-agent scenarios, including highway discretionary lane change decision control, actor-critic model predictive control, and learning-based modeling for improving safety in mixed traffic.
Plain English Explanation
The paper introduces a new way to control and plan the actions of multiple interconnected systems or "agents" in a complex environment. Imagine you're trying to coordinate the movements of a fleet of self-driving cars, robots in a factory, or even different departments within a company. These agents need to work together efficiently, but predicting how they will interact can be very challenging.
The key idea in this paper is to use a mathematical concept called "duality" to better model and predict how the agents will influence each other. Duality allows the system to capture the complex, back-and-forth nature of these interactions, rather than treating them as isolated or independent. This enables more effective planning and control of the overall system.
The authors show that this duality-based approach is scalable, meaning it can handle a large number of agents or modalities, and demonstrate its effectiveness in several real-world scenarios, such as improving safety in mixed traffic environments and coordinating multi-agent systems with capacity constraints.
Technical Explanation
The paper presents a scalable multi-modal model predictive control (MPC) framework that leverages duality-based interaction predictions to enable efficient planning and control for complex, multi-agent systems.
The key technical innovation is the use of a duality-based model to capture the complex interactions between different agents or modalities in the system. This duality-based model allows the framework to predict how the agents will influence each other's actions and states, which is critical for effective planning and control.
The authors formulate the multi-modal MPC problem as a bilevel optimization problem, where the upper-level problem optimizes the control inputs for the overall system, and the lower-level problem predicts the interactions between the agents using the duality-based model. This bilevel structure enables the framework to scale to large, complex systems while maintaining computational efficiency.
The authors demonstrate the effectiveness of their approach through several case studies, including highway discretionary lane change decision control, actor-critic model predictive control, and learning-based modeling for improving safety in mixed traffic. The results show that the duality-based interaction predictions can significantly improve the performance and scalability of the multi-modal MPC framework compared to alternative approaches.
Critical Analysis
The paper presents a novel and promising approach for scalable multi-modal control of complex, multi-agent systems. The use of duality-based interaction predictions is a key innovation that allows the framework to capture the intricate dynamics and interdependencies between agents more effectively than traditional methods.
However, the authors acknowledge that the duality-based model may be challenging to learn or estimate in practice, as it requires accurate modeling of the underlying interactions between agents. Additionally, the bilevel optimization problem can be computationally demanding, especially for large-scale systems, and the authors note that further research is needed to improve the computational efficiency of the approach.
Another potential limitation is the reliance on a priori knowledge of the system dynamics and agent interactions. In real-world scenarios, these may not be fully known or may change over time, which could reduce the effectiveness of the duality-based predictions. Exploring ways to incorporate online learning or adaptation mechanisms could enhance the robustness of the framework in dynamic environments.
Despite these potential challenges, the paper provides a solid foundation for further research and development in the area of scalable multi-modal control. The authors' demonstration of the approach in several relevant case studies, such as improving safety in mixed traffic environments and coordinating multi-agent systems with capacity constraints, suggests promising avenues for practical applications.
Conclusion
This paper presents a scalable multi-modal model predictive control framework that leverages duality-based interaction predictions to enable efficient planning and control for complex, multi-agent systems. The key innovation is the use of a duality-based model to capture the intricate dynamics and interdependencies between different agents or modalities, which allows the framework to make more accurate predictions and decisions.
The authors demonstrate the effectiveness of their approach through several case studies, showing that the duality-based interaction predictions can significantly improve the performance and scalability of the multi-modal MPC framework compared to alternative methods. While the approach has some potential limitations, such as the computational complexity and the need for accurate modeling of agent interactions, the paper provides a solid foundation for further research and development in this important area of multi-agent control and coordination.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Motion Planning under Uncertainty: Integrating Learning-Based Multi-Modal Predictors into Branch Model Predictive Control
Mohamed-Khalil Bouzidi, Bojan Derajic, Daniel Goehring, Joerg Reichardt
0
0
In complex traffic environments, autonomous vehicles face multi-modal uncertainty about other agents' future behavior. To address this, recent advancements in learningbased motion predictors output multi-modal predictions. We present our novel framework that leverages Branch Model Predictive Control(BMPC) to account for these predictions. The framework includes an online scenario-selection process guided by topology and collision risk criteria. This efficiently selects a minimal set of predictions, rendering the BMPC realtime capable. Additionally, we introduce an adaptive decision postponing strategy that delays the planner's commitment to a single scenario until the uncertainty is resolved. Our comprehensive evaluations in traffic intersection and random highway merging scenarios demonstrate enhanced comfort and safety through our method.
5/7/2024

Highway Discretionary Lane-change Decision and Control Using Model Predictive Control
Zishun Zheng, Yihan Wang, Yuan Lin
0
0
To enable autonomous vehicles to perform discretionary lane change amidst the random traffic flow on highways, this paper introduces a decision-making and control method for vehicle lane change based on Model Predictive Control (MPC). This approach divides the driving control of vehicles on highways into two parts: lane-change decision and lane-change control, both of which are solved using the MPC method. In the lanechange decision module, the minimum driving costs for each lane are computed and compared by solving the MPC problem to make lane-change decisions. In the lane-change control module, a dynamic bicycle model is incorporated, and a multi-objective cost function is designed to obtain the optimal control inputs for the lane-change process. Additionally, A long-short term memory (LSTM) model is used to predict the trajectories of surrounding vehicles for both the MPC decision and control modules. The proposed lane-change decision and control method is simulated and validated in a driving simulator under random highway traffic conditions.
4/4/2024
RACP: Risk-Aware Contingency Planning with Multi-Modal Predictions
Khaled A. Mustafa, Daniel Jarne Ornia, Jens Kober, Javier Alonso-Mora
0
0
For an autonomous vehicle to operate reliably within real-world traffic scenarios, it is imperative to assess the repercussions of its prospective actions by anticipating the uncertain intentions exhibited by other participants in the traffic environment. Driven by the pronounced multi-modal nature of human driving behavior, this paper presents an approach that leverages Bayesian beliefs over the distribution of potential policies of other road users to construct a novel risk-aware probabilistic motion planning framework. In particular, we propose a novel contingency planner that outputs long-term contingent plans conditioned on multiple possible intents for other actors in the traffic scene. The Bayesian belief is incorporated into the optimization cost function to influence the behavior of the short-term plan based on the likelihood of other agents' policies. Furthermore, a probabilistic risk metric is employed to fine-tune the balance between efficiency and robustness. Through a series of closed-loop safety-critical simulated traffic scenarios shared with human-driven vehicles, we demonstrate the practical efficacy of our proposed approach that can handle multi-vehicle scenarios.
6/21/2024

Differentiable Predictive Control for Large-Scale Urban Road Networks
Renukanandan Tumu, Wenceslao Shaw Cortez, J'an Drgov{n}a, Draguna L. Vrabie, Sonja Glavaski
0
0
Transportation is a major contributor to CO2 emissions, making it essential to optimize traffic networks to reduce energy-related emissions. This paper presents a novel approach to traffic network control using Differentiable Predictive Control (DPC), a physics-informed machine learning methodology. We base our model on the Macroscopic Fundamental Diagram (MFD) and the Networked Macroscopic Fundamental Diagram (NMFD), offering a simplified representation of citywide traffic networks. Our approach ensures compliance with system constraints by construction. In empirical comparisons with existing state-of-the-art Model Predictive Control (MPC) methods, our approach demonstrates a 4 order of magnitude reduction in computation time and an up to 37% improvement in traffic performance. Furthermore, we assess the robustness of our controller to scenario shifts and find that it adapts well to changes in traffic patterns. This work proposes more efficient traffic control methods, particularly in large-scale urban networks, and aims to mitigate emissions and alleviate congestion in the future.
6/18/2024