DiffTune: Auto-Tuning through Auto-Differentiation

0
🧪
Sign in to get full access
Overview
- The performance of robots in complex tasks depends on the quality of their low-level controllers
- Tuning these controllers is challenging due to the inherent nonlinearity and complexity
- This paper introduces DiffTune, a novel gradient-based automatic tuning framework for controller optimization
Plain English Explanation
The paper discusses the challenge of getting robots to perform high-level tasks well. The key to this is having a good low-level controller that can precisely control the robot's movements. However, designing and tuning these low-level controllers is difficult because the underlying dynamics of the robot are complex and nonlinear.
The researchers present a new method called DiffTune that can automatically tune the parameters of the low-level controller. Their approach treats the tuning as an optimization problem, where they use gradient-based methods to find the best set of controller parameters.
To compute the necessary gradients, they "unroll" the dynamics of the robot and the controller into a computational graph, which allows them to efficiently propagate gradients through the system. They also use a technique called $\mathcal{L}_1$ adaptive control to handle uncertainties in the physical system that aren't captured in the model.
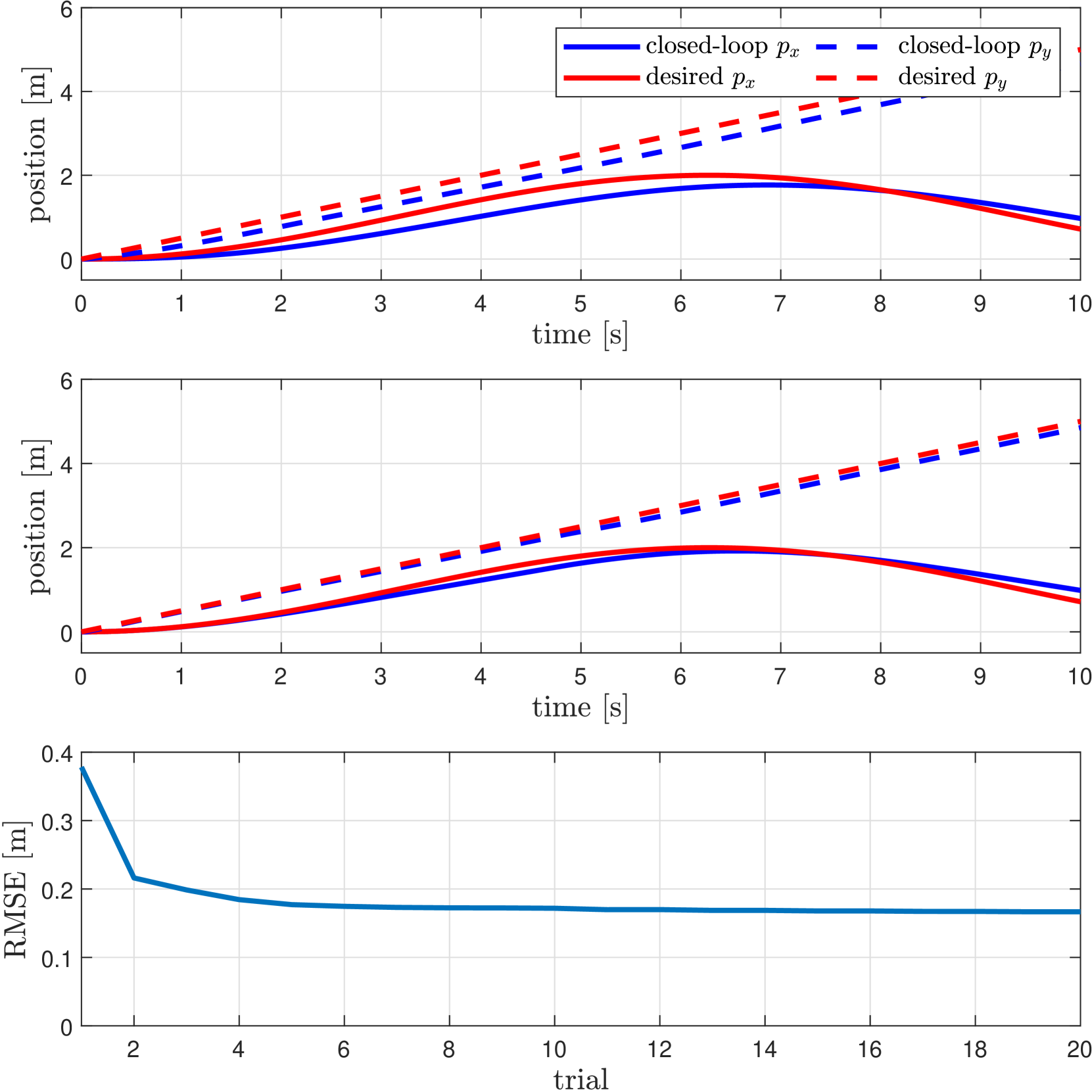
The researchers validate DiffTune in simulation on a Dubin's car and a quadrotor, showing that it outperforms other state-of-the-art auto-tuning methods. They also demonstrate its effectiveness on a real-world quadrotor, achieving a 3.5x reduction in tracking error compared to manual tuning.
Technical Explanation
The key innovation in this paper is the DiffTune framework, which uses gradient-based optimization to automatically tune the parameters of a robot's low-level controller.
The approach works by "unrolling" the dynamics of the robot and the controller into a computational graph. This allows them to efficiently compute the gradients of the controller parameters with respect to the robot's performance using sensitivity propagation. They then use these gradients to update the controller parameters through gradient-based optimization.
To handle the inevitable uncertainties in the physical system that aren't captured in the model, the researchers incorporate an $\mathcal{L}_1$ adaptive control technique. This compensates for these unmodeled effects so that the gradients used for tuning are not biased.
The authors validate DiffTune in simulation on a Dubin's car and a quadrotor, comparing it to other state-of-the-art auto-tuning methods such as PID tuning using cross-entropy and deep learning and LiveTune. They show that DiffTune achieves the best performance in a more efficient manner due to its effective use of first-order information about the system.
Finally, the researchers demonstrate DiffTune's effectiveness on a real-world quadrotor, where it achieves a 3.5x reduction in tracking error compared to manual tuning over a 12-dimensional controller parameter space in just 10 trials.
Critical Analysis
The paper presents a compelling solution to the challenge of tuning low-level robot controllers, which is a critical problem for achieving robust high-level performance. The DiffTune framework seems well-designed, with the use of $\mathcal{L}_1$ adaptive control to handle model uncertainties being a particularly clever innovation.
That said, the paper does not address some potential limitations of the approach. For example, it's unclear how well DiffTune would scale to systems with very high-dimensional controller parameter spaces, or how sensitive it is to the quality of the initial model. There may also be concerns about the computational cost of unrolling the dynamics and propagating gradients, especially for complex robotic systems.
Additionally, while the results on the quadrotor are promising, it would be helpful to see more extensive real-world validation across a wider range of robotic platforms and tasks. This would help build confidence in the generalizability of the DiffTune approach.
Overall, this is a well-executed piece of research that makes a valuable contribution to the field of robot control. The DiffTune framework represents an interesting and potentially impactful technique, and I encourage readers to think critically about its strengths, limitations, and future potential.
Conclusion
This paper presents DiffTune, a novel gradient-based approach for automatically tuning the low-level controllers of robots. By formulating the tuning as an optimization problem and efficiently computing gradients through sensitivity propagation, DiffTune can optimize controller parameters in a more effective and scalable way than existing auto-tuning methods.
The results demonstrate the power of this approach, with DiffTune achieving significant performance improvements on simulated and real-world robotic platforms. This work represents an important step forward in the quest to create highly capable and reliable robotic systems that can excel at complex real-world tasks.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🧪
0
DiffTune: Auto-Tuning through Auto-Differentiation
Sheng Cheng, Minkyung Kim, Lin Song, Chengyu Yang, Yiquan Jin, Shenlong Wang, Naira Hovakimyan
The performance of robots in high-level tasks depends on the quality of their lower-level controller, which requires fine-tuning. However, the intrinsically nonlinear dynamics and controllers make tuning a challenging task when it is done by hand. In this paper, we present DiffTune, a novel, gradient-based automatic tuning framework. We formulate the controller tuning as a parameter optimization problem. Our method unrolls the dynamical system and controller as a computational graph and updates the controller parameters through gradient-based optimization. The gradient is obtained using sensitivity propagation, which is the only method for gradient computation when tuning for a physical system instead of its simulated counterpart. Furthermore, we use $mathcal{L}_1$ adaptive control to compensate for the uncertainties (that unavoidably exist in a physical system) such that the gradient is not biased by the unmodelled uncertainties. We validate the DiffTune on a Dubin's car and a quadrotor in challenging simulation environments. In comparison with state-of-the-art auto-tuning methods, DiffTune achieves the best performance in a more efficient manner owing to its effective usage of the first-order information of the system. Experiments on tuning a nonlinear controller for quadrotor show promising results, where DiffTune achieves 3.5x tracking error reduction on an aggressive trajectory in only 10 trials over a 12-dimensional controller parameter space.
Read more7/12/2024
➖
0
Automatic Parameter Tuning of Self-Driving Vehicles
Hung-Ju Wu, Vladislav Nenchev, Christian Rathgeber
Modern automated driving solutions utilize trajectory planning and control components with numerous parameters that need to be tuned for different driving situations and vehicle types to achieve optimal performance. This paper proposes a method to automatically tune such parameters to resemble expert demonstrations. We utilize a cost function which captures deviations of the closed-loop operation of the controller from the recorded desired driving behavior. Parameter tuning is then accomplished by using local optimization techniques. Three optimization alternatives are compared in a case study, where a trajectory planner is tuned for lane following in a real-world driving scenario. The results suggest that the proposed approach improves manually tuned initial parameters significantly even with respect to noisy demonstration data.
Read more6/26/2024
0
DiffTune-MPC: Closed-Loop Learning for Model Predictive Control
Ran Tao, Sheng Cheng, Xiaofeng Wang, Shenlong Wang, Naira Hovakimyan
Model predictive control (MPC) has been applied to many platforms in robotics and autonomous systems for its capability to predict a system's future behavior while incorporating constraints that a system may have. To enhance the performance of a system with an MPC controller, one can manually tune the MPC's cost function. However, it can be challenging due to the possibly high dimension of the parameter space as well as the potential difference between the open-loop cost function in MPC and the overall closed-loop performance metric function. This paper presents DiffTune-MPC, a novel learning method, to learn the cost function of an MPC in a closed-loop manner. The proposed framework is compatible with the scenario where the time interval for performance evaluation and MPC's planning horizon have different lengths. We show the auxiliary problem whose solution admits the analytical gradients of MPC and discuss its variations in different MPC settings, including nonlinear MPCs that are solved using sequential quadratic programming. Simulation results demonstrate the learning capability of DiffTune-MPC and the generalization capability of the learned MPC parameters.
Read more7/8/2024

0
LiveTune: Dynamic Parameter Tuning for Feedback-Driven Optimization
Soheil Zibakhsh Shabgahi, Nojan Sheybani, Aiden Tabrizi, Farinaz Koushanfar
Feedback-driven optimization, such as traditional machine learning training, is a static process that lacks real-time adaptability of hyperparameters. Tuning solutions for optimization require trial and error paired with checkpointing and schedulers, in many cases feedback from the algorithm is overlooked. Adjusting hyperparameters during optimization usually requires the program to be restarted, wasting utilization and time, while placing unnecessary strain on memory and processors. We present LiveTune, a novel framework allowing real-time parameter adjustment of optimization loops through LiveVariables. Live Variables allow for continuous feedback-driven optimization by storing parameters on designated ports on the system, allowing them to be dynamically adjusted. Extensive evaluations of our framework on standard machine learning training pipelines show saving up to 60 seconds and 5.4 Kilojoules of energy per hyperparameter change. We also show the feasibility and value of LiveTune in a reinforcement learning application where the users change the dynamics of the reward structure while the agent is learning showing 5x improvement over the baseline. Finally, we outline a fully automated workflow to provide end-to-end, unsupervised feedback-driven optimization.
Read more5/14/2024