DiffTune-MPC: Closed-Loop Learning for Model Predictive Control

0
Sign in to get full access
Overview
- The paper presents DiffTune-MPC, a closed-loop learning approach for model predictive control (MPC)
- It aims to improve the performance of MPC systems by learning the control parameters in an end-to-end fashion
- The key idea is to optimize the MPC parameters directly based on the control performance in a differentiable manner
Plain English Explanation
Model predictive control (MPC) is a powerful technique for controlling complex systems, but it requires carefully tuning various parameters to achieve good performance. DiffTune-MPC: Closed-Loop Learning for Model Predictive Control introduces a new approach to automatically learn these parameters.
The core insight is to treat the MPC parameters as learnable variables and optimize them directly based on the control performance, rather than manually tuning them. This "closed-loop learning" approach allows the system to automatically adjust the parameters to improve the overall behavior, without requiring expert knowledge or extensive trial-and-error.
The key innovation is using differentiable programming techniques to make the MPC optimization process differentiable. This enables gradients to be computed with respect to the MPC parameters, allowing them to be optimized using standard gradient-based methods.
By integrating the parameter learning directly into the control loop, DiffTune-MPC can discover MPC configurations that significantly outperform manual tuning, leading to better control performance and stability. This can be especially impactful for complex systems where manual tuning is challenging or time-consuming.
Technical Explanation
DiffTune-MPC: Closed-Loop Learning for Model Predictive Control introduces a novel approach for learning the parameters of a model predictive control (MPC) system in an end-to-end, differentiable manner.
The core idea is to formulate the MPC optimization problem in a way that allows the control parameters to be treated as learnable variables. By making the entire MPC process differentiable, the authors can compute gradients with respect to these parameters and optimize them directly based on the control performance.
This "closed-loop learning" approach is in contrast to traditional MPC, where the parameters are manually tuned through trial-and-error. By integrating the parameter learning into the control loop, DiffTune-MPC can discover MPC configurations that significantly outperform manual tuning, leading to improved control performance and stability.
The key technical contributions include:
- Formulating the MPC problem in a differentiable way, allowing gradients to be computed with respect to the control parameters
- Developing efficient optimization techniques to solve the resulting differentiable MPC problem
- Demonstrating the effectiveness of DiffTune-MPC on a variety of benchmark control tasks, including inverted pendulum, quadrotor control, and robotic manipulation
Critical Analysis
The DiffTune-MPC paper presents a compelling approach for learning MPC parameters in a closed-loop fashion. By making the entire MPC process differentiable, the authors unlock powerful gradient-based optimization techniques that can automatically discover high-performing MPC configurations.
One potential limitation is the computational overhead of the differentiable MPC formulation, which may be more complex than traditional MPC. The paper does not provide a detailed analysis of the runtime or memory requirements of DiffTune-MPC compared to manual tuning.
Additionally, the paper focuses on relatively simple benchmark tasks, and it would be valuable to see how DiffTune-MPC scales to more complex, real-world control problems. Further research is needed to understand the generalization capabilities and limitations of this approach.
Another area for future work is exploring the interpretability of the learned MPC parameters. Understanding how the closed-loop learning process arrives at the optimal configurations could provide valuable insights for control system design.
Overall, DiffTune-MPC represents an exciting advancement in the field of model predictive control, with the potential to significantly improve the performance and accessibility of this powerful control technique.
Conclusion
DiffTune-MPC: Closed-Loop Learning for Model Predictive Control introduces a novel approach for learning the parameters of a model predictive control system in an end-to-end, differentiable manner. By formulating the MPC problem in a way that allows the control parameters to be treated as learnable variables, the authors unlock powerful gradient-based optimization techniques that can automatically discover high-performing MPC configurations.
This closed-loop learning approach represents a significant advancement in the field of MPC, with the potential to improve the performance and accessibility of this powerful control technique. While the paper focuses on relatively simple benchmark tasks, the core ideas have promising implications for a wide range of real-world control problems, from robotics to energy systems. Further research is needed to explore the scalability, interpretability, and broader applicability of DiffTune-MPC.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
DiffTune-MPC: Closed-Loop Learning for Model Predictive Control
Ran Tao, Sheng Cheng, Xiaofeng Wang, Shenlong Wang, Naira Hovakimyan
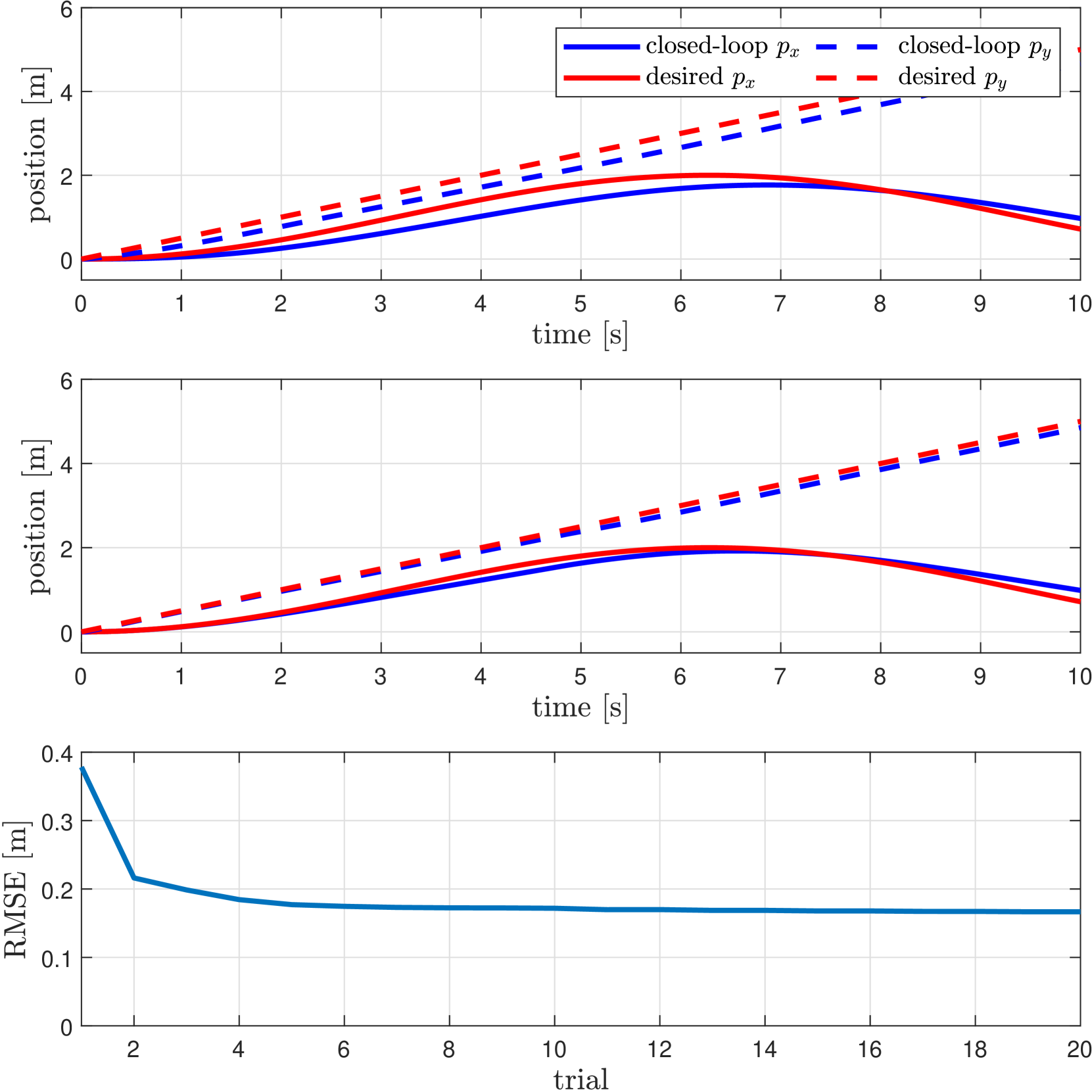
Model predictive control (MPC) has been applied to many platforms in robotics and autonomous systems for its capability to predict a system's future behavior while incorporating constraints that a system may have. To enhance the performance of a system with an MPC controller, one can manually tune the MPC's cost function. However, it can be challenging due to the possibly high dimension of the parameter space as well as the potential difference between the open-loop cost function in MPC and the overall closed-loop performance metric function. This paper presents DiffTune-MPC, a novel learning method, to learn the cost function of an MPC in a closed-loop manner. The proposed framework is compatible with the scenario where the time interval for performance evaluation and MPC's planning horizon have different lengths. We show the auxiliary problem whose solution admits the analytical gradients of MPC and discuss its variations in different MPC settings, including nonlinear MPCs that are solved using sequential quadratic programming. Simulation results demonstrate the learning capability of DiffTune-MPC and the generalization capability of the learned MPC parameters.
Read more7/8/2024

0
Stability-informed Bayesian Optimization for MPC Cost Function Learning
Sebastian Hirt, Maik Pfefferkorn, Ali Mesbah, Rolf Findeisen
Designing predictive controllers towards optimal closed-loop performance while maintaining safety and stability is challenging. This work explores closed-loop learning for predictive control parameters under imperfect information while considering closed-loop stability. We employ constrained Bayesian optimization to learn a model predictive controller's (MPC) cost function parametrized as a feedforward neural network, optimizing closed-loop behavior as well as minimizing model-plant mismatch. Doing so offers a high degree of freedom and, thus, the opportunity for efficient and global optimization towards the desired and optimal closed-loop behavior. We extend this framework by stability constraints on the learned controller parameters, exploiting the optimal value function of the underlying MPC as a Lyapunov candidate. The effectiveness of the proposed approach is underlined in simulations, highlighting its performance and safety capabilities.
Read more4/19/2024
📈
0
Differentiable Robust Model Predictive Control
Alex Oshin, Hassan Almubarak, Evangelos A. Theodorou
Deterministic model predictive control (MPC), while powerful, is often insufficient for effectively controlling autonomous systems in the real-world. Factors such as environmental noise and model error can cause deviations from the expected nominal performance. Robust MPC algorithms aim to bridge this gap between deterministic and uncertain control. However, these methods are often excessively difficult to tune for robustness due to the nonlinear and non-intuitive effects that controller parameters have on performance. To address this challenge, we first present a unifying perspective on differentiable optimization for control using the implicit function theorem (IFT), from which existing state-of-the art methods can be derived. Drawing parallels with differential dynamic programming, the IFT enables the derivation of an efficient differentiable optimal control framework. The derived scheme is subsequently paired with a tube-based MPC architecture to facilitate the automatic and real-time tuning of robust controllers in the presence of large uncertainties and disturbances. The proposed algorithm is benchmarked on multiple nonlinear robotic systems, including two systems in the MuJoCo simulator environment and one hardware experiment on the Robotarium testbed, to demonstrate its efficacy.
Read more7/29/2024
🧪
0
DiffTune: Auto-Tuning through Auto-Differentiation
Sheng Cheng, Minkyung Kim, Lin Song, Chengyu Yang, Yiquan Jin, Shenlong Wang, Naira Hovakimyan
The performance of robots in high-level tasks depends on the quality of their lower-level controller, which requires fine-tuning. However, the intrinsically nonlinear dynamics and controllers make tuning a challenging task when it is done by hand. In this paper, we present DiffTune, a novel, gradient-based automatic tuning framework. We formulate the controller tuning as a parameter optimization problem. Our method unrolls the dynamical system and controller as a computational graph and updates the controller parameters through gradient-based optimization. The gradient is obtained using sensitivity propagation, which is the only method for gradient computation when tuning for a physical system instead of its simulated counterpart. Furthermore, we use $mathcal{L}_1$ adaptive control to compensate for the uncertainties (that unavoidably exist in a physical system) such that the gradient is not biased by the unmodelled uncertainties. We validate the DiffTune on a Dubin's car and a quadrotor in challenging simulation environments. In comparison with state-of-the-art auto-tuning methods, DiffTune achieves the best performance in a more efficient manner owing to its effective usage of the first-order information of the system. Experiments on tuning a nonlinear controller for quadrotor show promising results, where DiffTune achieves 3.5x tracking error reduction on an aggressive trajectory in only 10 trials over a 12-dimensional controller parameter space.
Read more7/12/2024