PID Tuning using Cross-Entropy Deep Learning: a Lyapunov Stability Analysis

0

Sign in to get full access
Overview
- This paper explores a novel approach to tuning PID (Proportional-Integral-Derivative) controllers using cross-entropy deep learning, with a focus on ensuring Lyapunov stability.
- The researchers developed a simulation environment for an Autonomous Underwater Vehicle (AUV) to test their control system and tuning method.
- The key contributions of the paper are the use of cross-entropy optimization to tune the PID parameters and a Lyapunov stability analysis to guarantee the closed-loop system's stability.
Plain English Explanation
The paper discusses a new way to fine-tune the settings of a PID controller using a deep learning technique called cross-entropy optimization. PID controllers are commonly used in various industries, such as robotics and manufacturing, to help maintain stability and control. However, tuning these controllers can be challenging, as it requires finding the right balance between the proportional, integral, and derivative terms.
The researchers in this paper developed a simulation environment for an autonomous underwater vehicle (AUV) to test their control system and tuning method. They used the cross-entropy method, a type of optimization algorithm, to automatically adjust the PID parameters to achieve the best performance. Crucially, they also conducted a Lyapunov stability analysis to ensure that the final PID settings would result in a stable closed-loop system, meaning the AUV's behavior would remain predictable and reliable over time.
The key advantage of this approach is that it combines the flexibility of deep learning with the rigorous mathematical guarantees of Lyapunov stability analysis. This could make it easier to deploy PID controllers in complex, safety-critical applications like autonomous vehicles or industrial control systems, where reliable, stable performance is essential.
Technical Explanation
The paper presents a novel approach to tuning PID controllers using cross-entropy deep learning, with a focus on ensuring Lyapunov stability. The researchers developed a simulation environment for an Autonomous Underwater Vehicle (AUV) to test their control system and tuning method.
The cross-entropy optimization technique is used to automatically adjust the PID parameters to achieve the best performance in the simulated AUV environment. This is a departure from traditional manual tuning methods, which can be time-consuming and require expert knowledge.
Importantly, the researchers also conducted a Lyapunov stability analysis to guarantee the closed-loop stability of the system. Lyapunov stability analysis is a mathematical framework that ensures the system's behavior remains predictable and reliable over time, even in the face of disturbances or changes in the environment.
The combination of cross-entropy optimization and Lyapunov stability analysis is a key contribution of the paper. It allows the PID controller to be tuned automatically while still providing strong guarantees about the system's long-term behavior. This could have important implications for deploying PID controllers in safety-critical applications, such as autonomous vehicles or industrial control systems, where reliable performance is essential.
Critical Analysis
The paper provides a rigorous and well-designed approach to PID tuning using cross-entropy deep learning and Lyapunov stability analysis. However, there are a few potential limitations and areas for further research:
-
Simulation-based evaluation: The researchers only evaluated their approach in a simulated AUV environment. While this allowed them to thoroughly test the control system and tuning method, it's essential to validate the approach on real-world hardware to ensure it translates well to physical systems.
-
Scalability and complexity: The Lyapunov stability analysis provides strong guarantees, but it can be challenging to scale to more complex systems with higher-dimensional state spaces. The researchers may need to explore alternative stability analysis techniques to handle more complex control problems.
-
Robustness to model uncertainties: The paper does not explicitly address how the control system and tuning method would perform in the face of uncertainties or changes in the AUV's dynamics. Further research is needed to assess the robustness of the approach to model inaccuracies or unmodeled disturbances.
Overall, the paper presents a promising approach to PID tuning that combines the flexibility of deep learning with the rigorous stability guarantees of Lyapunov analysis. However, additional validation and research will be necessary to fully understand the real-world applicability and limitations of this method.
Conclusion
This paper explores a novel approach to tuning PID controllers using cross-entropy deep learning, with a focus on ensuring Lyapunov stability. The researchers developed a simulation environment for an Autonomous Underwater Vehicle (AUV) to test their control system and tuning method, which combines the flexibility of cross-entropy optimization with the mathematical guarantees of Lyapunov stability analysis.
The key contributions of this work are the use of cross-entropy optimization for automatic PID parameter tuning and the Lyapunov stability analysis to ensure the closed-loop system's long-term reliable performance. This could have important implications for deploying PID controllers in safety-critical applications, such as autonomous vehicles or industrial control systems, where predictable and stable behavior is essential.
While the paper presents a promising approach, further research is needed to validate the method on real-world hardware, address scalability and complexity challenges, and assess the system's robustness to model uncertainties. Nonetheless, this work represents an important step forward in the development of advanced control systems that can combine the benefits of deep learning and rigorous mathematical analysis.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
PID Tuning using Cross-Entropy Deep Learning: a Lyapunov Stability Analysis
Hector Kohler, Benoit Clement, Thomas Chaffre, Gilles Le Chenadec
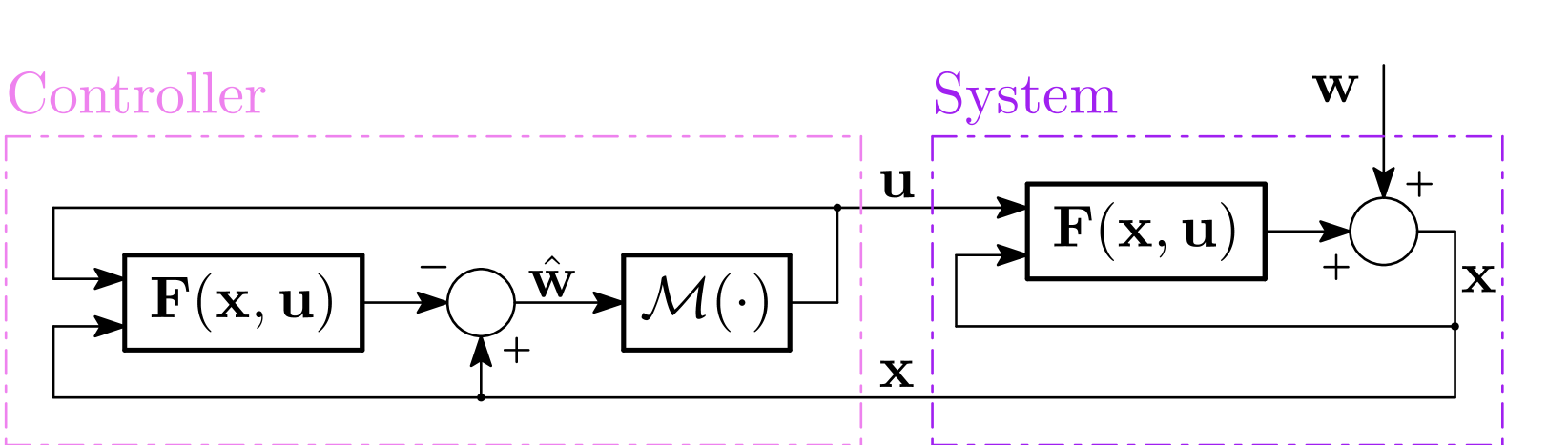
Underwater Unmanned Vehicles (UUVs) have to constantly compensate for the external disturbing forces acting on their body. Adaptive Control theory is commonly used there to grant the control law some flexibility in its response to process variation. Today, learning-based (LB) adaptive methods are leading the field where model-based control structures are combined with deep model-free learning algorithms. This work proposes experiments and metrics to empirically study the stability of such a controller. We perform this stability analysis on a LB adaptive control system whose adaptive parameters are determined using a Cross-Entropy Deep Learning method.
Read more4/19/2024

0
Distributionally Robust Policy and Lyapunov-Certificate Learning
Kehan Long, Jorge Cortes, Nikolay Atanasov
This article presents novel methods for synthesizing distributionally robust stabilizing neural controllers and certificates for control systems under model uncertainty. A key challenge in designing controllers with stability guarantees for uncertain systems is the accurate determination of and adaptation to shifts in model parametric uncertainty during online deployment. We tackle this with a novel distributionally robust formulation of the Lyapunov derivative chance constraint ensuring a monotonic decrease of the Lyapunov certificate. To avoid the computational complexity involved in dealing with the space of probability measures, we identify a sufficient condition in the form of deterministic convex constraints that ensures the Lyapunov derivative constraint is satisfied. We integrate this condition into a loss function for training a neural network-based controller and show that, for the resulting closed-loop system, the global asymptotic stability of its equilibrium can be certified with high confidence, even with Out-of-Distribution (OoD) model uncertainties. To demonstrate the efficacy and efficiency of the proposed methodology, we compare it with an uncertainty-agnostic baseline approach and several reinforcement learning approaches in two control problems in simulation.
Read more8/6/2024
0
Learning to Boost the Performance of Stable Nonlinear Systems
Luca Furieri, Clara Luc'ia Galimberti, Giancarlo Ferrari-Trecate
The growing scale and complexity of safety-critical control systems underscore the need to evolve current control architectures aiming for the unparalleled performances achievable through state-of-the-art optimization and machine learning algorithms. However, maintaining closed-loop stability while boosting the performance of nonlinear control systems using data-driven and deep-learning approaches stands as an important unsolved challenge. In this paper, we tackle the performance-boosting problem with closed-loop stability guarantees. Specifically, we establish a synergy between the Internal Model Control (IMC) principle for nonlinear systems and state-of-the-art unconstrained optimization approaches for learning stable dynamics. Our methods enable learning over arbitrarily deep neural network classes of performance-boosting controllers for stable nonlinear systems; crucially, we guarantee L_p closed-loop stability even if optimization is halted prematurely, and even when the ground-truth dynamics are unknown, with vanishing conservatism in the class of stabilizing policies as the model uncertainty is reduced to zero. We discuss the implementation details of the proposed control schemes, including distributed ones, along with the corresponding optimization procedures, demonstrating the potential of freely shaping the cost functions through several numerical experiments.
Read more9/30/2024
📈
0
Active Learning of Discrete-Time Dynamics for Uncertainty-Aware Model Predictive Control
Alessandro Saviolo, Jonathan Frey, Abhishek Rathod, Moritz Diehl, Giuseppe Loianno
Model-based control requires an accurate model of the system dynamics for precisely and safely controlling the robot in complex and dynamic environments. Moreover, in the presence of variations in the operating conditions, the model should be continuously refined to compensate for dynamics changes. In this paper, we present a self-supervised learning approach that actively models the dynamics of nonlinear robotic systems. We combine offline learning from past experience and online learning from current robot interaction with the unknown environment. These two ingredients enable a highly sample-efficient and adaptive learning process, capable of accurately inferring model dynamics in real-time even in operating regimes that greatly differ from the training distribution. Moreover, we design an uncertainty-aware model predictive controller that is heuristically conditioned to the aleatoric (data) uncertainty of the learned dynamics. This controller actively chooses the optimal control actions that (i) optimize the control performance and (ii) improve the efficiency of online learning sample collection. We demonstrate the effectiveness of our method through a series of challenging real-world experiments using a quadrotor system. Our approach showcases high resilience and generalization capabilities by consistently adapting to unseen flight conditions, while it significantly outperforms classical and adaptive control baselines.
Read more9/4/2024